
Стол для релоадинга своими руками
Добавил пользователь Евгений Кузнецов Обновлено: 18.09.2024
Закрутка- в данном случае не нужна, вообще вещь полезная. Совочек для пороха\дроби, не пригодился. Оправка из 12г баллончика с СО2 для правки гильзы. Лучше делать из 8г советского, он ближе по диаметру к гильзе. Навойник, для проталкивания пыжей в гильзу. Весьма полезный предмет. Весы. Без весов ты донор пальцев мирозданию, а не релоадырь! Весы должны точно отмерять до сотых долей грамма. К электронным обязательно надо купить калибровочную гирьку и регулярно весы калибровать! Станок Дуплет и мерка для порохо Лии. Заменяется любыми приспособами для подготовки и закрытия гильзы (УПС 5, Барклай и закрутка, ЛИИ ЛоадАлл2, Мес, етс.) и дозатором пороха. Ну и пыжи с пулями и порох. Я кручу на порохе Сунар 35 с пулями Люман Саббот на 32г.
Первый шаг- подготовка гильзы. Если гильзя стрелянная, её надо обжать, развернуть немного горловину и декапсулировать. Если гильза новая, то можете сразу переходить к капсуляции или (если она уже с капсулем) к отмерке пороха.
В Дуплете есть такая вот приспособа для одновременного обжатия юбки гильзы, легкой развальцовки горлышка и декапсуляции.
В собранном виде выглядит вот так.
Вставляешь внутрь гильзу, надавливаешь сверху штоком станка с насадкой-декапсулятором и вуаля!

Капсуль извлечен, гильза обжата! Осталось только перевернуть оправку и снова надавить прессом уже с другого конца, что бы выдавить гильзу из приспособы.
У гильзы немного расправленно дульце, хотя в дальнейшем я буду развальцовывать его отдельной насадкой, перед загрузкой пороха и пыж-контейнера.
Послед декапсуляции переходим к обратному процессу- капсуляции новым капсулем. Для этого в Дуплете есть такой вот набор.
Слева на право- капсуля, оправка, вставляемая в гильзу, собстна гильза, упор для капсуля. Ставим упор снизу, на него в центр капсуль, оправку одеваем в гильзу,
ставим сверху на упор, надавливаем сверху прессом до касания юбки гильзы основания упора (ограждение для капсуля подпружинено и уходит вниз) и вуаля! Гильза капсулирована!

Вот 100 капсулированных гильз и около сотни стреляных капсулей в коробочке.
Дальше переходим к отмерке пороха и загрузке пыжей.
Я пользуюсь меркой Lee, до этого пользовался меркой Военохот, но она бесила тем, что мерзко скрипит при работе и нехило так просыпает порох, особенно пластинчатый, типа G3000 или сокола. Можно неторопливо отмерять каждую навеску на весах. Я же просто настраиваю мерку на нужную массу и периодически делаю проверку. Лиишка на сунаре дает погрешность примерно +\- 0.01г, т.е. навеска у меня в патронах от 1.81 до 1.83г.

Перед загрузкой пороха я прохожу расширителем горловины гильзы, для удобства проталкивания ПК.


Вот так гильза выглядит после. Та самая, что на двух предыдущих фотках.

Отмеряем порох, затыкаем гильзу пыж-контейнером\пыжами (что бы в случае опрокидывания, не рассыпать порошок). Можно сразу же загружать дробь\пулю.

Я использую пули Люман Саббот, как показавшие самую лучшую кучность (50-70мм на 50м) и при этом не требующие "танцев с бубном" как Лиишные колпачки (юбку торцани, монетку подложи, ПК порви, девственницу над пачками с патронами оскверни, етс.)
200шт пуль.

Ну и переходим к финальному этапу- закрытию гильзы. Можно закрутить закруткой, я закрываю звездой. Для этого к Дуплету есть насадка револьверного типа, очень убодная и быстрая, к тому же очень красиво закрывающая патрон (а у нас уже таки патрон!).

Для контроля глубины посадки заряда в гильзу вэлконт дает специальный кондуктор, но я тупо сделал зарубку на навойнике и подкрасил её серебрянкой, что бы было видно. На фото зарубку не видно, она чуть ниже края гильзы. Если бы зарубка была выше, я бы серьезно задумался- а не нафигачил ли я в гильзу двойную навеску?! Такой патрон был бы разобран и вторично снаряжен порохом уже на весах.
Что бы гильзу не смяло, я использую такую вот защитную оправку.
Гильза сначала обжимается первой головкой, формируется шалашик. Обратите внимание на прилив на боковой стенке, он показывает, где будет "сгиб" шалашика. Если гильза бэушная, то лучше располагать уже имеющийся сгиб напротив этого прилива, иначе шалашик выйдет кривым.

После первой головы:

Потом вторая голова подрубает шалашик, формируя бортик.

А третья окончательно закрывает патрон.
Маленький хинт- если третью операцию делать без защитной оправки и осаживать пресс немного дальше, чем на предыдущих стадиях, то на патроне получается хорошее такое закругление, гарантирующее безпроблемную подачу патронов в оружии с магазинным питанием.

В общем и целом, за два с половиной часа (с учетом перекура на чаек) я накрутил 100 патронов. Да, со станком Лии ЛоадАлл вышло бы раза в полтора быстрее, но конечный результат на дуплете мне нравится больше.
Электрическая циркулярная пила — самый востребованный инструмент в мастерской столяра, в цехах мебельных предприятий. Она используется в подсобном хозяйстве сельских жителей, на площадках индивидуальных предпринимателей для производства поддонов, ящиков, несложных столярных изделий.


Содержание
Виды циркулярки
По способу выполнения работы циркулярки разделяют на два вида:

Каждый из видов имеет свои особенности, преимущества, недостатки. Основное отличие стационарного станка от ручного инструмента в объекте движения. На стационарном станке распиливаемый материал передвигают вдоль пильного диска; ручной инструмент передвигают вдоль неподвижных заготовок.

Циркулярную пилу выбирают в зависимости от вида, количества выполняемой работы. Чтобы сделать полку для книг, табуретку, подставку для цветов, достаточно функционала ручной пилы.

Для массового производства, распиловки длинномерных, габаритных заготовок используют стационарную установку. Многие опытные мастера имеют в своем распоряжении оба вида циркулярок.


















Особенности ручной циркулярки
В основе инструмента — электрический двигатель с устанавливаемым на валу пильным диском. Модели от различных производителей имеют примерно одинаковую конструкцию.

Изделия оснащают множеством дополнительных приспособлений:
- Пусковой кнопкой с регулятором скорости вращения;
- Защитным кожухом;
- Выдвижным параллельным упором;
- Регуляторами глубины пропила, угла наклона;
- Патрубком для выброса опилок.


Инструмент удобен при выполнении таких работ:
- Распиливания досок, фанеры, древесно-стружечных плит;
- Раскроя бруса, нарезания реек;
- Выемки углублений под пазовые шипы;
- Обработки кромок, снятия фасок;
- Порезки отходов пиломатериалов на топливо.

Мощность аппарата выбирают, исходя из потребностей. Для непродолжительной работы в бытовых условиях, обработки заготовок толщиной до 4,5 см достаточно мощности до 1,2 кВт. Полупрофессиональные инструменты имеют мощность 1,8 кВт, режут заготовки толщиной до 6,5 см.

Профессиональная техника мощностью 2,2 кВт выдерживает длительные нагрузки, оставляет пропил до 8,5 см. На деревообрабатывающих предприятиях используют пилы мощностью до 5,5 кВт; их масса достигает 100 кг.
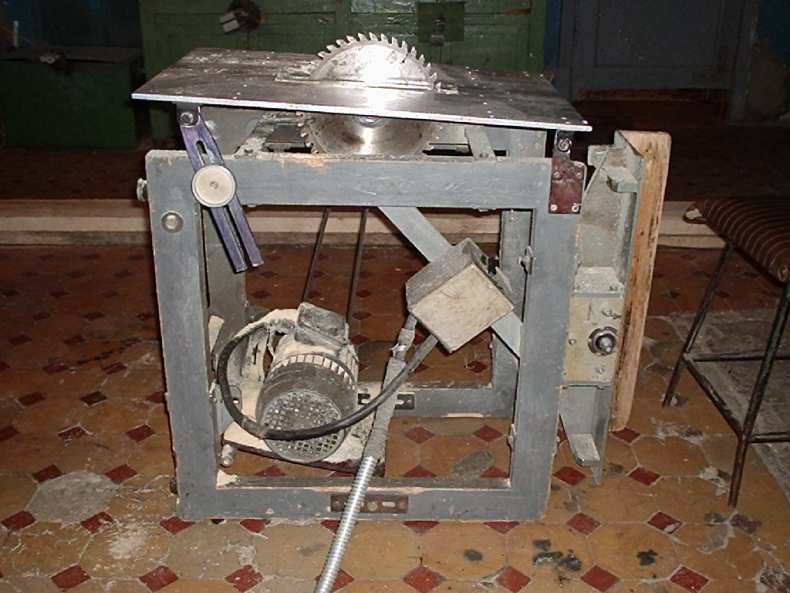
Требования к столу для циркулярки
Одно из преимуществ ручной циркулярной пилы в том, что ее можно закрепить на прочном основании, превратив таким образом в стационарный распиловочный станок. Такой аппарат особенно удобен для распиливания исходного материала большой длины на заготовки одинаковой ширины.

Некоторые бренды изначально предлагают в комплектации ручной пилы готовую станину. Она удобна, но из-за небольших размеров рабочего стола непригодна для работы с габаритными пиломатериалами.







Поэтому мастера изготавливают стол для стационарного размещения ручного инструмента самостоятельно. Конструкцию, размеры выбирают в соответствии со своими нуждами, возможностями, доступными материалами.

Самодельная конструкция должна удовлетворять нескольким требованиям:
- Быть прочной, устойчивой, выдерживать вибрацию, значительные механические нагрузки;
- Высоту определяют с учетом роста мастера, в среднем это 65-75 см;
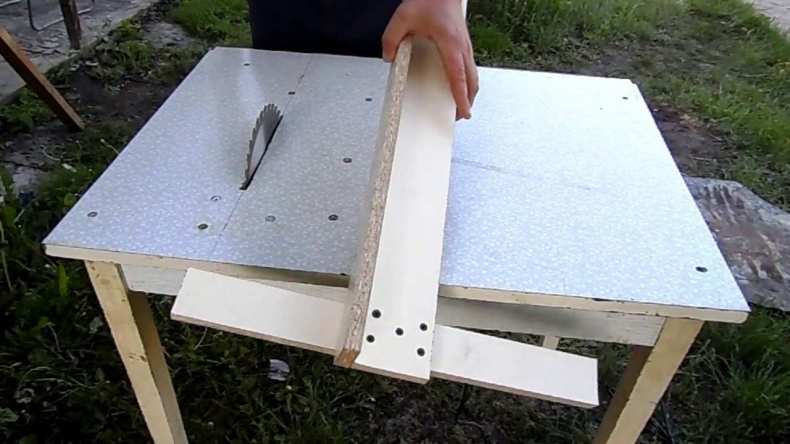
- Размеры столешницы выбирают с учетом возможности обработки как можно большего количества заготовок; близкой к оптимальной считают ширину 35-40 см, длину — 1,0-1,2 м; предусматривают установку дополнительных плах для увеличения ширины, длины стола в случае необходимости распиливания длинных, широких плит;
- Поверхность стола должна быть гладкой, ровной, без дефектов; в соответствующих местах проделывают паз для пильного диска, отверстия для крепления ручной пилы, защитного экрана, направляющих шаблонов.

Материалы для самостоятельного изготовления
Стол для циркулярки состоит из двух основных частей: опоры (станины, каркаса), столешницы. Столешница — более важная деталь, к выбору материала для нее подходят особенно тщательно. Подходит листовой материал с большой прочностью: толстая фанера, древесностружечная плита, текстолит, лист алюминия, стали.
Мастера изготавливают площадку стола необходимого размера, соединяя между собой узкие деревянные заготовки.

Для каркаса подходят деревянные бруски желательно из материала твердых пород, алюминиевый, стальной металлопрокат: уголок, швеллер, трубы квадратного, прямоугольного сечения. Стальные изделия более распространены, дешевле алюминиевых.
- Деревянные бруски для каркаса берут потолще: от 8х8 см; соединяют между собой различными способами.
- Соединение с помощью пазов, шипов наиболее трудоемко, но оно великолепно выглядит, указывает на высокую квалификацию мастера.
- Более простой способ — соединение с помощью болтов, гаек. Для повышения прочности используют металлические уголки.
- Соединение гвоздями наиболее примитивно, но непрочно, недолговечно.







Стальные детали основания соединяют двумя способами: болтами с гайками, сваркой. Сварочное соединение используется чаще: его проще, быстрее выполнить. В начале сварочных работ важно контролировать значения прямых углов, расстояние между деталями, так как в процессе сварки металл нагревается, деформируется.

Пошаговая инструкция
Прочный, удобный стол для ручной циркулярки получится, если придерживаться плана действий.
В этой статье я покажу, как я превратил свой стол с ручной регулировкой высоты в автоматизированный стол с Интернетом вещей. Я расскажу, как подобрать размеры и запустить моторы, а также как подключить ваше устройство IoT к Google при помощи Heroku в качестве публичного интерфейса.
Если коротко, у этого проекта две особенности. Первое: стол подключается из Google Smart Home к Heroku с помощью голосовых команд, и второе: Heroku и собственно стол общаются по протоколу Интернета вещей MQTT. MQTT — хорошее решение для Интернета вещей, а также для преодоления некоторых других препятствий, с которыми нам придётся столкнуться.
Прежде всего скажу, что я делал этот проект, просто чтобы поразвлечься. Надеюсь, вы найдёте статью занимательной и она послужит вам мотивацией, чтобы найти время и сделать что-то своё.

Аппаратная часть
Первая и, вероятно, самая трудная часть работы — переделать стол. В прошлой жизни у стола была отсоединяемая ручка, она располагалась у края столешницы. Сначала я подумал о том, чтобы прикрепить что-то к отверстию ручки, не пришлось бы вмешиваться в конструкцию стола. Я приобрёл несколько приводов, чтобы понять, как к столу прикрепить мотор, но безрезультатно. Затем появилась идея: стержень, работающий по длине всего стола, который соединял бы его ножки так, что они опускались и поднимались бы одновременно. Если закрепить подходящий к стержню привод, тогда я смогу использовать ремень для соединения стержня и мотора. Также можно было бы оснастить стол мотором, не сильно вмешиваясь в его конструкцию.
Важность крутящего момента
Заказав нужные привод и ремень, я начал искать на Amazon мотор с высоким крутящим моментом. И — о, чудо! — я нашёл много подходящих двигателей! Или мне так показалось… Купив маленький моторчик, около месяца я ждал его прибытия из Китая. Я был так взволнован, когда моторчик, наконец, приехал! Не мог дождаться выходных, чтобы, наконец, собрать всё воедино и получить мой моторизованный стол.
Всё пошло не по плану. Я провёл день, вырезая дыру для стержня в металлической обшивке стола. В тот момент у меня были только ручные инструменты, поэтому процесс занял больше времени, чем я рассчитывал. Ближе к концу дня я закончил сборку стола и был готов его опробовать.

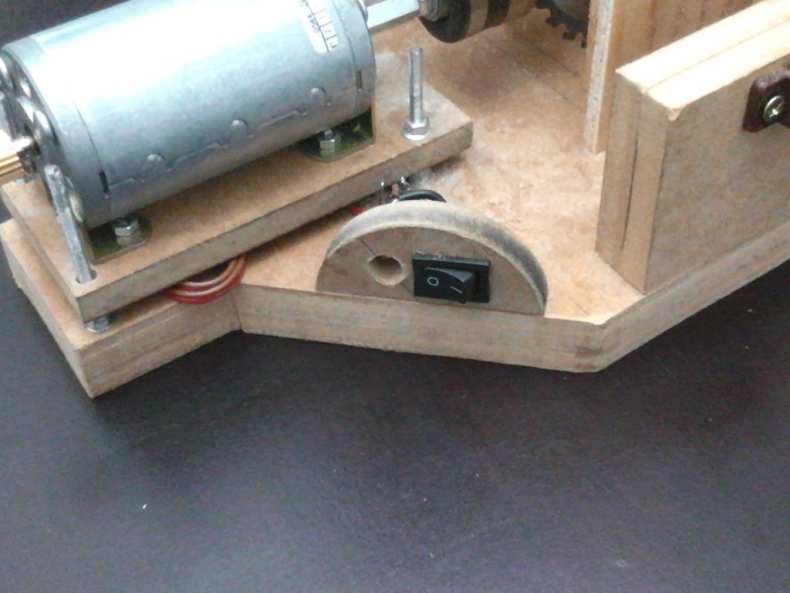
Слева на фото мотор и ремень. Вверху справа — прикреплённый к столу мотор (позже вы увидите больше о происходящем). Внизу справа мотор в положении на столе.
Подходящий мотор
Чтобы выбрать подходящий мотор, нужно было рассчитать, какой крутящий момент требуется для поднятия столешницы. Я был удивлён тем, насколько просто сделать это.
Крутящий момент — это сила, умноженная на длину плеча рычага.
Что ж, плечо рычага у меня было (это рукоятка стола), нужно было только рассчитать силу, которая легко повернула бы плечо рычага. Я нагрузил стол, привязав к ручке кувшин для молока и постепенно добавлял в кувшин воду, пока рычаг не начал вращаться. Повернув ручку кверху с наполненным кувшином я убедился, что вес легко поворачивает ручку. Я выяснил, что длина плеча рычага составляет 11 см, а требуемая сила — 4 фунта. Подставив эти цифры в формулу, я выяснил, что мотор должен выдавать крутящий момент не менее 19,95 кгс.см. И начал искать его.
Я решил переделать стол необратимым образом. Мне было известно, что проходящий через середину стола стержень полый. Поискав двухвальный мотор, я мог разрезать стержень и пересобрать его с мотором в середине. Купив два мотора с крутящим моментом 20 кгс.см, я гарантировал, что крутящего момента для поднятия стола достаточно.
В очередную прекрасную субботу я разобрал свой стол на четыре части, подпилив валы двигателей так, чтобы их можно было использовать при сборке стержня. Я проделал больше дырок в металле, чтобы поместить в них моторы. Ремня в этот раз не было: моторы соединялись напрямую со стержнем, дыры были достаточно большими. Пока наступал вечер, я пересобрал стол и загрузил его офисными принадлежностями.

Два верхних фото — полностью установленные на стол моторы. Два нижних фото —- интегрированный стержень, с помощью моторов проходящий по длине стола.
Я подключил моторы и соединил их с источником питания. Включив питание, я увидел движение стола! На этот раз я был увереннее, потому что правильно подобрал размеры моторов. Я удвоил мощность двигателей ради уверенности, но потрясающе было видеть их движение!
Однако позвольте уточнить, что стол был медленным. Я снял видео, чтобы показать другу, как работает стол, но ему пришлось включить ускорение времени на видео, чтобы не смотреть 5 минут, как стол меняет положение столешницы.
Обороты важны. Окончательная версия
Наконец я понял, что всё сводится к двум вещам: крутящему моменту и оборотам. Нужно было найти мотор с достаточным количеством оборотов при уже известном крутящем моменте.
Это было не так сложно. Хотя я не нашёл двухвалового мотора, зато нашёл прямоугольный редуктор, который превращает мотор с одним валом в двухвальный мотор.
Короче говоря, следующий месяц был месяцем ожидания коробки передач из Китая, а следующей после ожиданий субботой у меня был стол, который двигался с нужной скоростью.

Последний мотор сам по себе слева, а установленный — справа. Немного аппаратного обеспечения и много программного обеспечения.
Я не был доволен огромным блоком питания на моем столе, лежащем только ради того, чтобы управлять высотой столешницы. Кроме того, чтобы изменять положение стола от одного к другому и обратно, я менял местами провода. Небольшая проблема, но проект делался, чтобы в идеале просто нажимать кнопку и иметь несколько предустановок высоты.
Bluetooth
Первым решением было добавить к столу Bluetooth. В конце концов, похоже на то, что почти каждое устройство в доме имеет Bluetooth, а телефон представляется удобным интерфейсом управления чего-то подобного моему столу.
Итак, теперь я приобрёл плату контроллера мотора, плату для Bluetooth Nordic NRF52, сенсоры для измерения расстояния и начал возиться с прошивкой контроллера.
В конце статьи я оставлю ссылки на софт и прошивку, которые написал для проекта. Не стесняйтесь комментировать код: я не занимаюсь прошивками профессионально и хотел бы получить какие-то указания.
В качестве краткого введения: ESP32 написана на C++ с помощью библиотек Arduino для взаимодействия с приложением BLE Terminal на телефоне. Установка и конфигурирование BLE довольно сложны. Для начала нужно создать все характеристики для значений, которые вы хотели бы контролировать через BLE. Думайте о характеристике, как о переменной в вашем коде. BLE оборачивает переменную во множество обработчиков для получения и установки значения этой переменной.
Затем характеристики упаковываются в сервис с собственным UUID, который делает сервис уникальным и идентифицируемым из приложения. Наконец, вы должны добавить этот сервис к полезной нагрузке объявления, чтобы ваш сервис мог быть обнаружен устройством. Когда удалённое устройство соединяется с вашим сервисом и отправляет данные через характеристики, стол распознаёт, что пользователь хочет отрегулировать высоту до другой предустановки и начинает движение.
Для регулировки высоты столешница имеет определяющий текущую высоту встроенный в нижнюю часть сенсор TFMini-S LiDAR. Это забавный сенсор: он называется LiDAR, хотя на самом деле это лазер. Он использует оптику и светодиод, чтобы определить время полёта ИК-излучения. Так или иначе, сенсор определяет высоту стола. Затем контрольная плата определяет разницу между текущей высотой и запрашиваемой высотой и запускает мотор, который вращается в нужном направлении. Некоторые основные части кода приведены ниже, но вы можете увидеть весь файл здесь.
В файле происходит гораздо больше, но контекста у этого кода достаточно, чтобы понять происходящее. Обратите внимание, что мы создаём и конфигурируем все обратные вызовы BLE для всех характеристик, включая ручное движение, установку и получение значений пресета и, самое важное, выравнивает стол согласно предустановке.
Изображение ниже показывает взаимодействие с характеристиками для регулировки высоты стола. Последний элемент головоломки — машина состояний, которой известна текущая высота стола, требуема пользователем высота, и работает с этими двумя значениями.

Голый интерфейс bluetooth… Всё, что оставалось на данный момент, — научиться писать приложения под iOS…
Кроме крутости и добавления нового устройства к списку Google Assistant отпала необходимость писать приложение под iOS, чтобы управлять столом. И больше не нужно было доставать телефон, чтобы отрегулировать высоту. Ещё одна маленькая победа!
Добавление Интернета вещей
Теперь поговорим об апгрейде стола до управления голосом через Google Smart Home и как подружить его с Wi-Fi.
Добавить Wi-Fi было достаточно просто. Я заменил микроконтроллер Nordic NRF52 на ESP32 со встроенным WiFi. Большая часть софта была переносимой, потому что была написана на C++, а оба устройства могли программироваться с помощью Platform.IO и библиотек Arduino, включая tfmini-s, написанную мной для измерения текущей высоты стола.
Ниже показана архитектура системы взаимодействия стола с Google Smart Home. Давайте поговорим о взаимодействии между мной и Гуглом.

Итак, Bluetooth был включён. Пришло время выяснить, как взаимодействовать с Google Smart Home. Эта технология контролировала дом с помощью Smart Home Actions. В её действиях интересно то, что сервис действует как сервер OAuth2, а не как клиент. Большая часть проделанной с сервером работы была связана с реализацией приложения OAuth2 Node.js Express, которое добирается до Heroku и взаимодействует как прокси между Google и моим столом.
Мне повезло: была достойная реализация сервера с помощью двух библиотек. Первая библиотека — node-oauth2-server, была найдена здесь. Вторая библиотека express-oauth-server для подключения Express была найдена здесь.
Далее идет настройка самого приложения Express. Ниже приведены конечные точки, необходимые для сервера OAuth, но вы можете прочитать полный файл здесь.
Кода довольно много, но я объясню основные моменты. Два используемых для сервера маршрута OAuth2, — это /oauth/token и /oauth/authorize. Они применяются для получения нового токена или обновления истекших токенов. Далее нужно заставить сервер реагировать на действие Google. Вы заметите, что конечная точка /gaction/fulfillment указывает на объект google_actions_app .
Google отправляет запросы на ваш сервер в определённом формате и предоставляет библиотеку, помогающую обработать эти запросы. Ниже приведены функции, необходимые для связи с Google, а весь файл целиком лежит здесь. Наконец, есть конечная точка /healthz, о которой я расскажу в конце статьи.
Конечная точка /gaction/fulfillment использует промежуточное ПО под названием app.oauth.authenticate(), тяжёлая работа по обеспечению работы сервера OAuth2 была направлена на то, чтобы работало это промежуточное ПО. Оно проверяет, что токен-носитель, предоставленный нам Google, ссылается на существующего пользователя и не истёк. Далее маршрут отправляет запрос и ответ объекту google_actions_app .
Google отправляет запросы на ваш сервер в определённом формате и предоставляет библиотеку, помогающую анализировать и обрабатывать эти запросы. Ниже приведены функции, необходимые для связи с Google, но вы можете просмотреть весь файл целиком здесь.
Когда вы добавите интеллектуальное действие в свой аккаунт Google, Google выполнит запрос на синхронизацию. Этот запрос позволяет узнать, какие устройства доступны из аккаунта. Далее происходит опрашивающий запрос: Google запрашивает ваши устройства, чтобы определить их текущее состояние.
Когда вы впервые добавляете действие Google в свой аккаунт Smart Home, вы заметите, что Google сначала отправляет запрос синхронизации, а затем опрашивающий запрос, чтобы получить целостное представление о ваших устройствах. Последний — запрос это запрос на выполнение, который Google сообщает вашим устройствам, чтобы они что-то делали.
Google использует особенности устройства для предоставления элементов пользовательского интерфейса управления вашими устройствами в Google, а также для создания коммуникационных шаблонов голосового управления. Некоторые из особенностей включают в себя следующие настройки: ColorSetting, Modes, OnOff, and StartStop. Мне потребовалось некоторое время, чтобы решить, какая особенность будет лучше всего работать в моём приложения, но позже я выбрал режимы.
Проект в деле
Наконец, Google Smart Home и мой компьютер начали общаться. До этого для локального запуска сервера Express я использовал ngrok. Теперь, когда мой сервер наконец заработал достаточно хорошо, пришло время сделать его доступным для Google в любое время. Значит, нужно было разместить приложение на Heroku — это поставщик PaaS, упрощающий развёртывание и управление приложениями.
Всего в несколько кликов CloudMQTT и Postgres стали доступны моему приложению, и мне нужно было использовать только несколько переменных среды, чтобы интегрировать эти сервисы с моим приложением. Heroku не потребовал денег. Однако CloudMQTT — сторонним дополнение за $5 в месяц.
Я считаю, что необходимость в Postgres не нуждается в комментариях, но CloudMQTT заслуживает больше внимания.
Из Интернета в частную сеть. Сложный способ
Из Интернета в частную сеть через IoT
Я не был очень доволен этими решениями. Я подключил много смарт-устройств в дом, и мне никогда не приходилось открывать порт на маршрутизаторе, так что переадресации портов не было. Кроме того, пробивка дыр кажется гораздо более сложной, чем то, что я ищу, и лучше подходит для сетей P2P. В результате дальнейших исследований я обнаружил MQTT и узнал, что это протокол для IoT. Он обладает некоторыми преимуществами, такими как низкое энергопотребление, настраиваемая отказоустойчивость, и не требует переадресации портов. MQTT — протокол типа издатель/подписчик, это означает, что стол — подписчик определённого топика, а приложение Heroku — издатель этого топика.
Когда стол загружается, мы сначала запускаем связь между TFMini-S — датчиком расстояния — чтобы получить текущую высоту стола. Затем мы настраиваем конечный автомат для движения стола. Конечный автомат получает команды через MQTT, а затем отвечает за согласование запроса пользователя с фактической высотой стола, считываемой датчиком расстояния. Наконец, мы подключаемся к сети Wi-Fi, подключаемся к серверу MQTT и настраиваем обратный вызов для любых данных, получаемых по теме MQTT, на которую мы подписаны. Ниже я покажу функцию обратного вызова.
Конечный автомат регистрирует изменение состояния, полученное в теме MQTT. Затем он в основном цикле обрабатывает новое состояние.
Основной цикл выполняет несколько задач: во-первых, он повторно подключается к серверу MQTT, если еще не подключён. Затем обрабатывает все данные, полученные через топик MQTT. Наконец, код отрабатывает, перемещая столешницу в нужное место, запрошенное в топике MQTT.
Вот и всё! Стол полностью управляется голосом и обменивается данными с Google для получения команд!
Последние заметки
Последняя конечная точка, о которой я не упоминал, — конечная точка / healthz. Это связано с тем, что Google ожидает, довольно быстрого ответа, и загрузка приложения Heroku при каждом запросе в моём случае не работает. Я установил службу ping для проверки связи с конечной точкой /healthz каждую минуту, чтобы служба оставалась работоспособной и была готова ответить. Если вы планируете сделать что-то подобное, помните, что на это будут израсходованы все бесплатные часы на стенде. Сейчас всё нормально: это единственное используемое на Heroku приложение. Кроме того, за 7 долларов в месяц вы можете перейти на тарифный план Heroku’s Hobby с поддержкой постоянной работы приложения.
Создание устройства IoT связано с большими накладными расходами в начале. Я сконструировал оборудование, построил схему управления, настроил сервер MQTT, написал сервер Express OAuth2 и научился взаимодействовать с Google Smart Home через действия. Первоначальные накладные расходы были огромными, но я чувствую, что многого добился! Не говоря уже о том, что сервер MQTT, сервер приложений Express OAuth2 и Google Smart Home Actions можно использовать для другого проекта. Умные дома мне интересны, и я могу попытаться расширить свой репертуар IoT-устройств, включив в него датчики, отслеживающие происходящее вокруг моего дома и сообщающее об этом через MQTT. Датчики для мониторинга почвы, температуры и датчики света будет очень интересно мониторить и анализировать.
Что дальше?
Высота столешницы сейчас измеряется в лучшем случае ненадёжно. Я использую в целом работающим инфракрасным датчиком расстояния TFMini-S. Замечено, что высота стола немного меняется в течение дня, когда меняется окружающее освещение в комнате. Я заказал датчик угла поворота, чтобы подсчитать обороты стержня, проходящего через стол. Это должно дать мне движения точнее в любое время дня. У меня также есть доступ к серверу, который я размещаю в подвале. На нём я могу исследовать собственный сервер Mosquitto MQTT, Node-RED и Express-приложения OAuth2, если захочу хостить что-то сам. Наконец, сейчас вся электроника лежит прямо на моём столе. Я планирую организовать устройства так, чтобы все было красиво и аккуратно!
Тщательная подготовка к охоте — залог успеха. Для гладкоствольного ружья можно найти подходящий боекомплект в любом охотничьем магазине, но опытные охотники предпочитают самостоятельно снаряжать патроны. Самодельные комплекты демонстрируют лучшие результаты, они надежней и, чего скрывать, дешевле покупных.

Перечень необходимых изделий
Если вы решились на такой шаг, предварительная подготовка будет нелишней. Разовые затраты на необходимое оборудование быстро окупятся, а список необходимого оборудования для наполнения патронов в домашних условиях не будет слишком большим.
Что необходимо иметь в запасе:
- Точные весы. Ранее для этого использовался комплект аптечных весов и гирек, сейчас проще купить электронные приборы, шкала деления в которых позволяет точно отмерить вес от 0,01 грамма.
- Дозатор. При помощи его отмеряется необходимое количество пороха. Новичкам использовать мерку не рекомендуется за счет довольно большой погрешности измерений. Охотникам со стажем проще пользоваться бумажными гильзами, отрезанными по намеченному уровню. Для удобства работы все гильзы маркируются.
- Маленькая воронка. Пригодиться для пересыпания пороха и дроби в гильзу. Также часто можно встретить самодельные воронки из подручных средств.
- Навойник. Используется для досыла прокладок и пыжа в новую гильзу. Изделия с закругленным концом можно применять для расправления краев стреляных гильз (пластиковых или бумажных).
- Универсальный прибор Сидоренко или УПС. Приспособление для установки капсюля в головку гильзы. Самостоятельные попытки втиснуть капсюль в гнездо опасны, могут привести к срабатыванию взрывателя.
- Высечка или пробойник. Применяется для самостоятельного изготовления пыжей. Подходящий материал для этого — войлок или пробка.
- Прибор для завальцовки. Нужен для закрутки края готового патрона. Оборудование классифицируют по видам, выбор зависит от типа снаряжения патрона (дробовая или пулевая).
- Калибровочное кольцо. Необходимо для контроля формы патрона. Если приложены чрезмерные усилия по завальцовке края, гильза может расшириться, что сделает невозможным использование такого патрона на охоте.
Для работы необходимо предусмотреть удобное рабочее место. Для этого достаточно иметь устойчивый стол, лампу для дополнительного освещения, а также ящик со всем необходимым оборудованием, расходными материалами.

Что заготовить перед началом работы
Комплектующие для снаряжения патронов своими руками можно купить в специализированных магазинах, а некоторые элементы — изготовиться самостоятельно.
Что понадобиться для работы:
При набивке патронов в латунной гильзе, важно выбрать правильный размер пыжа. Со временем он может немного просесть, что создает воздушную прослойку возле пороха, приводит к несрабатыванию во время выстрела. Увеличенные размеры пыжа (взять 12 калибр для 16) помогут предотвратить подобные ситуации. Для бумажных и пластмассовых гильз это правило не распространяется, там пыж плотно сидит благодаря шероховатой поверхности стенок гильзы.

Этапы работы
Приготовив все необходимые материалы, можно приступать к работе.
Правильный алгоритм действий:
При должной сноровке снаряжение патрона займет несколько секунд. Важно не нарушать алгоритм, не стараться как можно плотней уложить все элементы, чтобы избежать возможного разрыва патрона во время выстрела.

Техника безопасности и важные моменты
Работы с порохом и взрывателями (капсюлями) требуют повышенного внимания и осторожности.
Главные правила безопасности:
В охотничьих магазинах — большой выбор приспособлений и комплектующих для самостоятельной набивки патронов. Этот полезный навык не только поможет сэкономить, но и дает больше уверенности в успехе во время охоты. Самодельные патроны, как показывает практика, имеют лучшую баллистику, меньший процент брака, и стоить по факту будут меньше.

Краткая видео инструкция по релоадингу патронов в домашних условиях:
Читайте также: