
Сервотестер своими руками
Добавил пользователь Skiper Обновлено: 04.10.2024
Сервомашинки или сервоприводы нашли широкое применение не только в роботостроении, моделизме, но и в различных отраслях промышленности и приборостроении.
Как устроена сервомашинка
Большинство сервоприводов используют три провода для работы. Провод для питания, обычно 4.8В или 6В, общий провод (земля) и сигнальный провод. Управляющий сигнал передает информацию о требуемом положении выходного вала. Вал связан с потенциометром, который определяет его положение. Контроллер в сервоприводе по сопротивлению потенциометра и значению управляющего сигнала определяет, в какую сторону требуется вращать мотор, чтобы получить нужное положение выходного вала. Чем выше напряжение питания сервопривода, тем быстрее он работает и больший момент развивает.
Характеристики сервоприводов
- Микро: 24мм x 12мм x 24мм, вес: 5-10 г.
- Мини: 30мм x 15мм x 35мм, вес 25 г.
- Стандарт: 40мм x 20мм x 37мм, вес: 50-60 г.
Скорость
Скорость сервоприводов измеряется временем поворота качалки сервопривода на угол 60 градусов при напряжении питания 4.8В и 6В. Например, сервопривод с параметром 0.22с/60° при 4.8В поворачивает вал на 60 градусов за 0.22с при напряжении питания 4.8В. Это не так быстро, как может показаться. Наиболее быстрые сервоприводы имеют время перемещения от 0.06 до 0.09с.
Угол поворота
Сервоприводы могут иметь угол поворота вала 60, 90, 180 градусов. Угол поворота ограничивается электроникой и механически. Существуют сервоприводы без ограничения, т.е. вращающиеся на 360 градусов. Если у Вас имеется сервопривод с рабочим диапазоном 60 градусов, то расширить его можно только изменив конструкцию сервомашинки. Иногда можно увеличить диапазон специальным образом исказив управляющий сигнал. Но это нестандартный и ненадежный способ.
Момент на валу
Момент сервопривода измеряется по весу груза в кг, который сервопривод может удерживать неподвижно на качалке с плечом 1 см. Указывают две цифры, для напряжения питания 4.8В и 6В. Например, если указано, что сервопривод развивает 10кг/см, значит, что на качалке длиной 1см сервопривод может развить усилие 10 кг, прежде чем остановится. Для качалки в 2см такой сервопривод сможет развить усилие 5кг, а на 5мм 20кг.
Цифровые и аналоговые сервоприводы
Цифровые и аналоговые сервоприводы механически не отличаются друг от друга. У них те же корпуса, моторы, шестеренки и даже потенциометры. Все дело в способе управления мотором. Цифровые сервоприводы более точны и, как правило, имеют меньшее время реакции. Но они потребляют больше энергии, чем аналоговые сервоприводы. Управляющий сигнал для аналоговых и цифровых сервоприводов одинаков.
Управляющий сигнал

Управляющий сигнал представляет собой импульсы переменной ширины. Импульсы повторяются с постоянной частотой (как правило, с частотой 50Гц). Положение сервопривода определяется шириной импульса. Для типичного сервопривода, используемого в радиоуправляемых моделях, длительность импульса в 1500 мкс означает, что сервопривод должен занять среднее положение. Увеличение или уменьшение длины импульса заставит сервопривод повернуться по часовой или против часовой стрелки, соответственно.
Таким образом, для управления сервоприводом нам потребуется формировать ШИМ с частотой 50 герц. При этом для положения "0" длительность импульса должна составлять 1000 микросекунд, а для положения "максимум" - 2000 микросекунды. Среднее положение - 1500 микросекунд.
Схема сервотестера
- Режим 1 - положение сервомашинок задается потенциометром
- Режим 2 - задается среднее положение сервоприводов
- Режим 3 - задающий сигнал циклически изменяется от одного крайнего положения к другому.
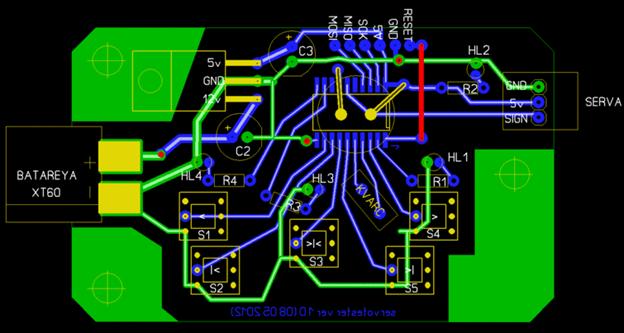
Печатная плата

Подписываемся на VK
YouTube канал


Подбор двигателя
Меню сайта
Магазин
TOP статьи

Оборудование
Плосколеты
Создание авиамоделей
- Фотоинструкции
- Видеоинструкции
- Обзоры изготовления
RC Магазины







Home Обзоры Самодельная электроника в моделизме Простейший сервотестер
- Как сделать Mini Flash
- Сокол (Falcon) 1000 - 2-х моторное пилотажное FPV крыло.
- Мини самолеты на радиоуправлении
- Дрон для новичка - Eachine Novice-II V2.0
- Как сделать самолет УТ-2 своими руками
- Бюджетный джип внедорожник - JY66 1/14 2.4Ghz 4WD
- Большие Гуси 2021
- Обзор радиоуправляемого джипа WPL C24 масштаба 1/16
- Самодельный токарный станок для домашней мастерской
- DW HOBBY Rainbow - летающее крыло из ЕПП








Попросили меня восстановить файлы печатной платы для одной из тем в форуме, решил вынести в статью.
На нашем сайте уже есть статьи о самодельных сервотестерах: Сервотестер на микроконтроллере attiny13 и Создаем сервотестер на микроконтроллере ATtiny13, эта статья дополняет тему.
Вот схема простого сервотестера.
Печатку в LAY "под утюг" можно скачать в конце статьи.
Элементы схемы сервотестера:
R1 = 18K
R2 = 680K
P1 = 50K переменный резистор
C1 = 0.033uF (33nF)
C2 = 0.1uF (100nF)
IC1 = LM555 таймер (или подобный)
D1 = 1N4148
Вот что о нем писали на форуме:

"Т естер работает сразу после сборки и в настройке не нуждается, из 2 сервотестеров у меня получился один рабочий "
" Съездил в Микронику за 15 руб купил аналог микросхемки LM555 - NE555N, за 30 руб потенциометр 50 ком (остальные детальки были) и быстренько спаял по вышеприведенной схемке платку. Все заработало сразу. Взял на пробу 4 разных сервомашинки и провел тестирование. "

Инструкция или, что умеет сервотестер:
1. Калибровка - выставляется максимум и минимум, сохраняется при выключении.
2. Установка начального положения, сохраняется при выключении.
3. Восстановление настроек по умолчанию.
4. Включение / выключение звукового сигнала.
5. Ручное управление с возможностью менять скорость.
6. Автоматическое управление с возможностью менять скорость.
7. Мгновенное перемещение - левое, центральное и правое.
1.Калибровка - выставляется максимум и минимум, сохраняется при выключении.
Режим калибровки позволяет установить конечные углы отклонения сервопривода.
4.Выключение / включение звукового сигнала
На включённом сервотестере одновременно нажать
Следующие нажатие выключит звук.
5.Автоматическое управление с возможностью менять скорость.
Включается одновременным нажатием кнопок I I
В этом режиме кнопки (выше) меняют скорость перемещения качалки
соответственно (выше).
Скорость установленная в автоматическом режиме сохраняется для ручного режима.
Если звук включён то перемещение качалки сопровождается мелодичным звуковым сигналом.
Выход из режима происходит при нажатии >I управляют перемещением качалки соответственно (вправо).
Перемещение качалки сопровождается мелодичным звуковым сигналом (если звуковой сигнал не отключён)
и светодиодной индикацией.
При достижении крайних положений соответствующий светодиод мигает и звучит прерывистый звуковой
сигнал (если звуковой сигнал не отключён)
7.Мгновенное перемещение - левое, центральное или правое.
В этом режиме кнопки I I I (правое) управляют “мгновенным” перемещением
качалки до конечных точек установленных при калибровке.
Соответствующий светодиод показывает выбранное положение.
Дальше расскажу, как он устроен.
ATtiny2313 нужно настроить на работу от внешнего или внутреннего кварца 8мгц, на схеме он есть, но я использовал внутренний генератор ATtiny2313.
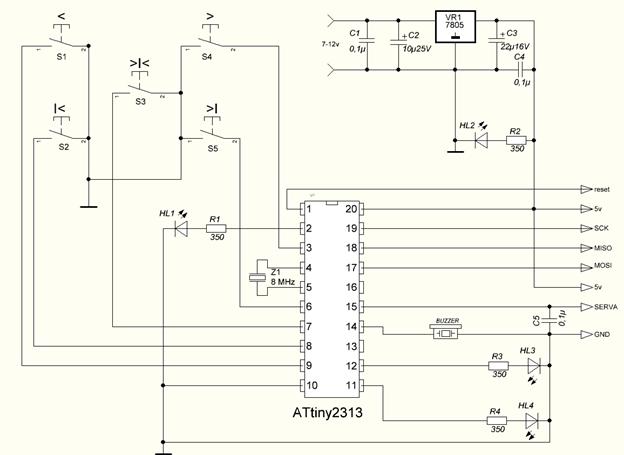
Плата двухсторонняя, разведена под резисторы 0,125Вт но в последствии были впаяны SMD, конденсаторы на 0.1мкФ на плате не обозначены и припаяны непосредственно к печатным проводникам. Перемычки обозначены красным цветом. Для подключения программатора выведены контактные площадки.

Cписок деталей:
1. XT60 - 1шт.
2. Кнопки (любые без фиксации) - 6шт.
3. Светодиоды (любые с током потребления до 20мА, желательно разного цвета) - 4шт.
4. L7805 - 1шт.
5. Пьезоизлучатель звуковой (любой без встроенного генератора) - 1шт.
6. Резисторы (подбираются под ваши светодиоды, 300 - 500 Ом)- 3шт.
7. Конденсаторы 0,1мкФ - 3шт., 10мкФ25В и 22мкФ16В - 1шт.
8. ATTiny2313 (корпус SOIC) - 1шт.
Сервопривод является стандартным компонентом для движущихся моделей и, кроме того, он используется и для других целей. Иногда может потребоваться проверить правильность работы сервопривода. Для этой цели и была разработана эта небольшая схема, которая позволяет быстро и легко протестировать практически все типы сервоприводов.
Кроме того, данным тостером можно проверить другие компоненты, которые могут быть подключены к системе дистанционного управления, например, контроллеры освещения или регуляторы двигателя. С помощью потенциометра ширина импульса может регулироваться от 0,9 мс до 2,1 мс, что соответствует диапазону регулирования от минус 120% до плюс 120%.

Схема состоит из 2 частей: собственно самого тестера сервопривода (DD1, R1, C3 и C4) и стабилизированного источника питания с напряжением +5В (DA1, C1 и C2).
Сторонний источник питания не обязателен, если подходящее напряжение уже доступно, например, от аккумулятора приемника с напряжением 4,8 В или 6 В. Однако в небольших моделях привод и вся электроника обычно питаются от одного элемента аккумулятора.

На схему питание подается через разъем К1. Напряжение должно быть в диапазоне от +5,5 В до +15 В, при этом хорошо подходят LiPo аккумуляторы с 2 или 3 ячейками (7,4 В или 11,1 В) или пакеты NiMH/NiCd с 5-10 ячейками.
Микросхема DA1 ( L4940V5 ) — это так называемый стабилизатор с низким падением напряжения, которому достаточно входного напряжения 5,5 В для создания стабильных 5 В. Это было сделано специально, чтобы схема надежно работала в широком диапазоне входных напряжений.
Кроме того, здесь сознательно использовалась модель с током 1,5 А, так как питается не только сервотестер, но и сам сервопривод , подключенный к разъему K2. Причем в охлаждении стабилизатора нет необходимости, поскольку опыт показывает, что тестер работает в течение непродолжительного времени и стабилизатор не успевает нагреться.
Сервотестер очень прост и состоит в основном из микроконтроллера ATtiny13 (DD1) и потенциометра R1. В зависимости от положения на ползунке R1 снимается напряжение от 0 В до +5 В и подается на вход PB3 микроконтроллера.
Микроконтроллер с помощью АЦП преобразует это напряжение в значение от 0 до 255. В соответствии с этим значением на выводе PB4 генерируется импульсный сигнал для сервопривода, который на осциллографе выглядит следующим образом:
С помощью потенциометра R1 ширина импульса может быть изменена в диапазоне от 0,9 мс до 2,1 мс. Импульсный сигнал повторяется каждые 20 мс. В соответствии с установленной шириной импульса сервопривод принимает следующие положения:

Микроконтроллер может быть запрограммирован через ISP (разъем K3).
Конструкция
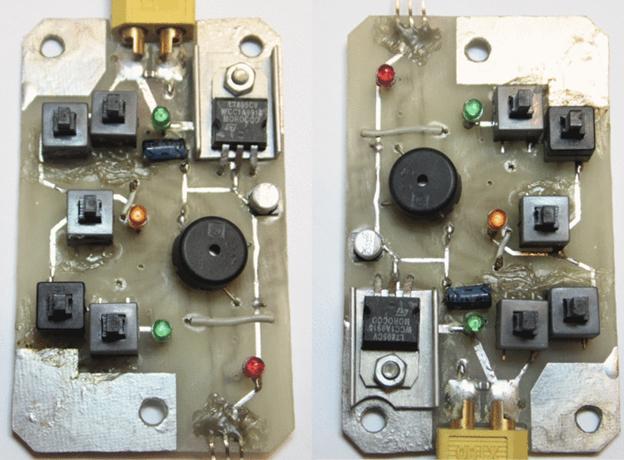
На верхнем рисунке показана готовая схема, которая была построена на макете размером 32 мм x 26 мм. В верхней части вы можете видеть регулятор напряжения с конденсаторами C1 и C2, потенциометр слева внизу и микроконтроллер справа. Микроконтроллер установлен панельку, чтобы плату можно было использовать в качестве устройства программирования для ATtiny13.

Напряжение подается с левой стороны платы через разъем JST. Таким образом, летная батарея вертолета может быть подключена напрямую. Остальные разъемы расположены на правой стороне платы: сверху подключается сервопривод, а снизу интерфейс для программирования. Черная метка между разъемами показывает, с какой стороны должна быть подключена линия заземления (черный провод сервомотора).
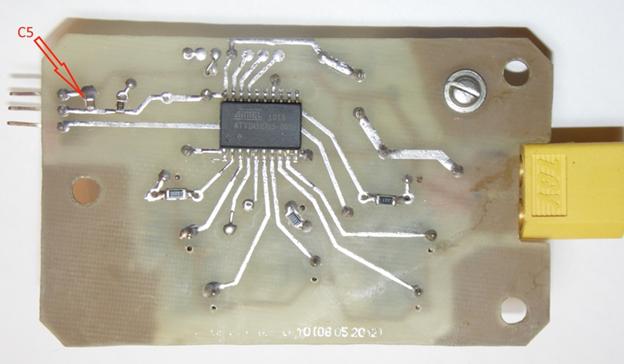
Как выглядит обратная сторона платы показано на нижнем рисунке. Как обычно, линии питания выполнены проводом диаметром 0,5 мм, для остальных использовалась медная проволока 0,3 мм.
Для безопасности схему следует установить в небольшой корпус или изолировать ее термоусадочной трубкой, при этом, конечно же, серво-разъем и потенциометр должны быть доступными.
Программное обеспечение
При программировании обязательно следует учитывать установку фьюзов. Они должны быть установлены следующим образом:
Программа микроконтроллера работает следующим образом: при включении питания сначала активируются порты ввода/вывода, АЦП, таймер и прерывание таймера.
Так как таймер должен формировать сервоимпульсы с малым шагом в диапазоне от 0,9 мс до 2,1 мс, то он работает на относительно быстрой частоте 150 кГц (отсчет примерно каждые 6,67 мкс).
В результате получается 16-битный счетчик, который может не только генерировать сервоимпульсы длительностью до 2,1 мс, но также и интервал 20 мс, в котором сервоимпульсы должны регулярно повторяться.
После инициализации основная программа запускается в бесконечном цикле. В нем постоянно проверяется, достиг ли счетчик значения 3000, что соответствует уже упомянутому интервалу 20 мс. Если это происходит, то 16-битный счетчик снова устанавливается на 0, а импульсный выход PB4 устанавливается на высокий уровень (начало импульса).
Затем определяется положение потенциометра путем считывания значения аналого-цифрового преобразователя. Это значение, которое находится в диапазоне от 0 до 255, теперь должно быть преобразовано в значение, которое можно напрямую сравнить со счетчиком таймера. Таким образом, основной программный цикл может определить конец импульса и в нужный момент снова установить на выходе PB4 низкий уровень.
Положение потенциометра преобразуется в значение импульса в 2 этапа: сначала значение аналого-цифрового преобразователя умножается на 181, и используется только старший байт 16-битного результата. В результате получается значение от 0 до 180.
На втором этапе добавляется фиксированное значение 135, так что конечный результат представляет собой диапазон значений от 135 до 315. По отношению к циклу таймера примерно 6,67 мкс — это соответствует желаемому диапазону импульсов от 0,9 мс до 2,1 мс.
Основная программа теперь постоянно сравнивает текущее показание счетчика с только что определенным значением импульса и, когда это значение достигается, переключает выход PB4 обратно на низкий уровень (конец импульса).
Читайте также: