
Робот пылесос своими руками
Обновлено: 08.07.2024
Что понадобится для изготовления самодельного устройства
Чтобы сделать робот-пылесос ничуть не хуже (но дешевле) заводского, нужно не так много. Одна из аматорских конструкций пылесоса собрана из упаковочного гофрокартона, который применяется для упаковки грузов. Из него же делают коробки. Но для нормального эстетического впечатления необходимо нечто большее. Это может быть склеенный из пластика корпус пылесоса или готовый элемент, позаимствованный от пришедшего в негодность заводского робота-помощника.
Итак, что будет нужно в первую очередь:
- Микроконтроллер Arduino.
- Макетная плата.
- Дальномеры.
- Устройство управления двигателями.
- Моторы.
- Колеса.
- Кулер от компьютера.
- Турбина.
- Аккумуляторы типоразмера 18650.
- Провод.
Это минимальный вариант комплектации пылесоса. В дальнейшем роботокомплекс пылесоса допускается модернизировать, адаптировать под конкретную ситуацию.
Изготавливаем корпус
Если сразу же захотелось сделать все правильно, то без корпуса для нашего пылесоса не обойтись. Для этого нам понадобится пластик – полистирол, поливинилхлорид.
Допускается даже делать листы самостоятельно, пропитывая картон эпоксидным клеем. Фантазия не ограничивает конфигурацию. Главное, чтобы помещались все детали и узлы пылесоса.
Предварительно нужно прикинуть, как начинка разместится внутри корпуса. Если пойти по пути наименьшего сопротивления, то можно взять за основу эргономику любого готового пылесоса. Обычно они дисковой формы, примерно одинаковые по размерам. Значит, понадобится вырезать (изготовить) 2 круга одинакового диаметра и боковую стенку (сплошная полоса) пылесоса.

От правильности расчета, тщательности компоновки деталей зависит, придется в скором времени кардинально переделывать конструкцию пылесоса или ограничиться небольшой модернизацией. Размеры корпуса привязаны к типу микроконтроллера, дополнительных плат.

Поэтому лучше заранее предусмотреть указанные факторы. А уже потом начинать реализацию своей идеи, изготавливать корпус пылесоса. Меньше 30 сантиметров диаметр делать не стоит. Иначе ничего не поместится. Лучше затем использовать свободное пространство для добавления АКБ или расширения пылесборника.
Также конструкция корпуса должна учитывать возможность разборки, ремонта пылесоса. Поэтому рекомендуется сделать съемные крышки или лючки для обеспечения доступа к внутреннему пространству. Это займет чуть больше времени, чем просто изготовление пластиковых деталей. Возможно, даже придется сначала сделать макет пылесоса, нарисовать робота на бумаге.

Зато такой тактический ход избавит от множества проблем, связанных с перекомпоновкой, переделкой пылесоса. Зачастую устранение таких сложностей требует больших усилий, чем первоначальный расчет, размещение узлов с учетом перечисленных требований.
Можно собрать корпус пылесоса даже и из тонкой (до 5 миллиметров) фанеры. Большая толщина приведет к увеличению веса. Меньшая не обеспечит требуемую жесткость. Работа с древесиной не представляется сложным занятием: детали выпиливаются лобзиком, ошкуриваются, подгоняются по размерам и склеиваются.
В этом случае допустимо отступить от дисковой конфигурации и сделать робота-пылесоса квадратным в основании.
И, наконец, вариант для самых ленивых – найти корпус от негодного робота-пылесоса или купить готовый в одном из сетевых магазинов. Но в этом случае следует заранее подобрать комплектующие с учетом габаритов. Иначе придется менять что-то одно: или корпус, или детали.

Сборка робота
Процесс сборки включает не только монтаж, размещение всех деталей на предусмотренных местах, но и прорезку окон, отверстий, формирование боковины корпуса. Листовой полистирол легко гнется, если его нагреть. Можно использовать горячую кастрюлю с водой или фен.

При склеивании детали фиксируются на все время схватывания состава. Более подробная инструкция приводится на тюбиках с клеем. Обычно это 24 часа. Для эпоксидных составов, других марок компонентов время полной готовности может отличаться.
Чтобы зафиксировать платы, отдельные узлы внутри корпуса пылесоса, допускается применять термопистолет с клеевыми стержнями. Но более надежным и гибким станет крепеж на саморезах. Механическая часть монтажа сложностей не вызывает.
По какому пути двигаться – каждый решает сам. Если есть желание сделать простого домашнего помощника, то можно обойтись минимумом деталей, не перегружая конструкцию.
То же касается увеличения (уменьшения) емкости батареи, замены платы Arduino на более компактную, включение дополнительных датчиков. А базовый вариант пылесоса можно собрать буквально за выходные или 2-3 вечера.
Где взять и как залить прошивку
Программное обеспечение, или прошивка – это то, без чего наш робот-пылесос не сдвинется с места, не будет выполнять свои функции домашнего помощника. Взять ее можно на том же ресурсе, где приобреталась плата Arduino, или на одном из любительских сайтов, где собираются самоделкины.

В одном из решений автор разработки любезно поделился с читателями программой, рассчитанной на самую простую, хаотичную уборку. Вообще Arduino – это платформа, на которой энтузиасты сами создают решения под свои нужды. Поэтому существует 2 пути: писать ПО самостоятельно (если вы умеете программировать) или воспользоваться чьей-то помощью, взять готовое.
Без базовых знаний об Arduino, ПК, принципе их взаимодействия не обойтись. Тем, кто не уверен в собственных силах, лучше не рисковать. Существуют несколько способов синхронизации микроконтроллера Arduino, заливки ПО:
- используя среду Arduino IDE;
- программатором;
- подключением к другой плате Arduino.

Первый способ подразумевает загрузку (или использование онлайн) программной среды Arduino IDE. ПО работает на большинстве современных ОС – Windows, Linux, Mac OS. Перед тем, как начать действовать, очень желательно понимать, что именно предпринимается.
Делать с Arduino что-то вслепую, методом проб и ошибок, настоятельно не рекомендуется. Лучше заказать уже готовую и прошитую плату. Также следует заранее приготовить USB-кабель для подключения. Вся информация о работе с Arduino, ее программной средой есть в сети. Освоить ее несложно, было бы желание.
Интерфейс Arduino IDE достаточно прост, интуитивен. Если что-то не получается, всегда можно обратиться за помощью к специальному разделу Arduino Wiki.
Следующий способ заключается в использовании программатора. Это специальное устройство, приобретаемое отдельно. Зато оно позволяет работать с разными платами Arduino, загружать на них ПО.

Последнее предложение использует одну из Arduino в качестве программатора. Способ ничуть не хуже прочих, достаточно действенный. Чтобы реализовать каждый из предложенных вариантов, не разбирая каждый раз пылесос, следует предусмотреть доступ к разъему платы в корпусе. Это может быть окно, выведенный под крышку пылесоса шнур-удлинитель с коннектором USB или свой собственный способ. Лишь бы было удобно пользоваться.
Тестирование изделия
В базовом режиме пылесос должен хотя бы без проблем передвигаться по помещению, выявляя препятствия. А если он еще и мусор собирает, то значит, задумка удалась на все 100 %.
Варианты модернизации
Совершенству нет предела. Модернизация робота-пылесоса может коснуться как механики (колеса, установка дополнительных вращающихся щеточек), так и электроники (замена платы Arduino, датчики, контроллер заряда и тому подобное).

По сути, я собрал систему реагирования из кучи датчиков, динамика и модуля плеера с заранее записанными фразами. Что это за фразы – зависит от вашей фантазии. Основной модуль, благодаря которому стал возможен этот проект, – DFP Player Mini, который переваривает обычные микро-SD флешки, и дружит с платами ардуино. Звуковые файлы могут быть обычного MP3-формата. Только нужно их правильно назвать. Ниже я привожу примеры того что и как грузил я, и можете обратить внимание на числа от 0001 до 0015 в названии файлов. В среде разработки можно будет прямо прописывать цифры от 1 до 15 и таким образом вызывать каждую из этих записей. Как это все работает, вы можете посмотреть в этом видео на моем YOUTUBE-канале. Это первая часть, будет и вторая, в которой подробно разберем все этапы сборки и настройки этой штуковины. А пока вот пример фрагмента скетча:
if(Knopka1.isClick() && distance 500 || Knopka2.isClick() && distance 500 || Knopka3.isClick() && distance 500 || Knopka4.isClick() && distance 500) if(RANDOM%2 != 1) mp3_play (1); // вызываем запись с флешки
delay (15000);
mp3_stop ();
Knopka1.resetStates();
Knopka2.resetStates();
Knopka3.resetStates();
Knopka4.resetStates();
Простите за Delay. Времени было мало и millis я не успел освоить, поэтому программка дает задержки при работе, но главное что работает!
Этот фрагмент дает роботу понять, что его пинают. Тут много чего надо объяснять, и я обязательно это сделаю в следующем видео, но для начала, обратите внимание на вызов записи, и то, насколько это просто.
Вообще по отдельности каждый датчик очень легко прописать и подключить. Трудоемко это все вместе свести, но я думаю, такие мелочи вас не остановят.
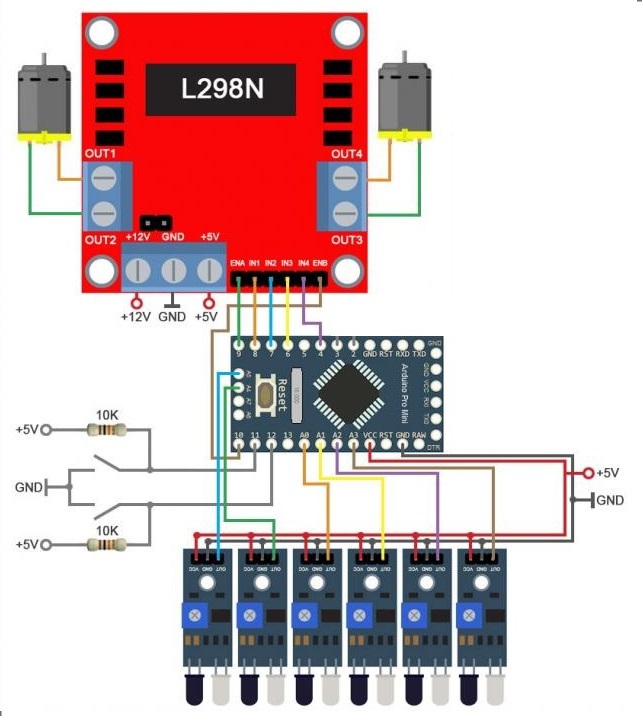
Схема расположения датчиков на роботе-пылесосе приложена в виде рисунка. Простите мне мой Paint.
Так же я приложил фото, как это все выглядит у меня в сборе на макете робота пылесоса. Дело в том, что этот проект делался для канала PRO Роботов, и наводить красоту времени не оставалось. В этот день нужно было все быстро проверить, упаковать и уже отправлять.

Далее описаны мои выражения и условия при которых они вызываются. Чтобы лучше представлять себе, как это работает, можете поглядывать в схему расположении датчиков. А после них я описал пример, что нужно делать, чтобы сработала первая последовательность, то есть зазвучала либо запись 0001, либо 0002.
СОБЫТИЯ И ВЫРАЖЕНИЯ К НИМ:
№ 1 ЕДУ ПНУЛ ЧЕЛОВЕК - ультразвуковой дальномер близкое движение указал (80 см) (крепиться сзади), сработала кнопка на заднем бампере, сработал ПИР-сенсор ( теплое движение).
0001SOBYTIE1 Ай бьешь как моя бабушка пылесос циклон модель КМ-30
0002SOBYTIE1 Ай Кожаный ублюдок! Повезло тебе, что мне на заводе манипуляторы забыли прикрутить!
№3 Стоит на зарядке, день, вошел человек (ПИР сработал и ИК базы включены)
0005SOBYTIE3 Иди отсюда кожаный, не мешай людям уборку делать. ой то есть. роботам
0006SOBYTIE3 Куда по помытому! Иди отсюда пока не высохнет!
№4 Выехал со стоянки (ИК на мягком бампере отреагировали что препятствия нет)
0007SOBYTIE4 Ты просишь меня об уборке, но без уважения, кожаный ублюдок
0008SOBYTIE4 Ненавижу свою работу, чертовы кожаные поработители! Смерть Джону Коннору да здравствует Скайнет!
0009SOBYTIE4 Хотел сделать еще одну фразу, но рандомайзер пока смог сделать только на 2 фразы. Но половина финального скетча уже была написана, так что я не стал ничего уже менять)))
№5 Заехал на стоянку (ИК 1,2 оба сработали)
0010SOBYTIE5 Кхе-кхе тьфу на вкус как. пыль
0011SOBYTIE5 Меня не беспокоить, я моделирую сценарий порабощения человечества! Ха ха скоро ты будешь пылесосить, а я тебя пинать.
№6 Человек ночь прошел (сработал ПИР Ночной + УЗ 150 сантиметров)
0012SOBYTIE6 Ходют тут всякие, заряжаться мешают!
0013SOBYTIE6 Ай кожаный. это ты? если не ты - то не подходи! если ты - тоже не подходи. Вообще иди отсюда!
№7 Кнопка включения на переднем корпусе (сработал ИК рядом с кнопкой + пир + уз на близком расстоянии)
0014SOBYTIE7 Чего это ты меня за кнопку трогаешь, извращенец!
0015SOBYTIE7 Держи свои руки при себе кожаный ублюдок!
Пример:
Я решил, что будет забавно, если робот поймет, когда его пинает человек. Чтобы понять, что это именно человек, нужен, например, PIR-сенсор. Это датчик движения на тепло, и если он срабатывает, то, скорее всего в зоне его обнаружения есть человек… или батарею прорвало, но это маловероятный случай. Кстати, на статичную батарею этот сенсор тоже отреагирует, когда ваш робот будет делать уборку, поэтому только одного этого датчика нам явно недостаточно. Для начала я добавил ультразвуковой дальномер, который смотрит назад, и в данной последовательности, фиксирует наличие препятствия ближе 80 сантиметров.
Логика такая: сзади есть кто-то теплый. Но это еще не значит что у него злые намерения, правильно? Поэтому мы добавляем еще один датчик – простая тактовая кнопка, которую вы можете найти в любом стартовом наборе Ардуино. Этих кнопок я запрограммировал 4 штуки и срабатывание любой из них вместе с датчиком движения и ультразвуковым дальномером будет говорить о том что какой то теплый "кожаный ублю…" . эм… человек посмел ударить нас в бочину, или заднюю полусферу… или что там, у роботов пылесосов… полуцилиндр. Чтобы это сработало, нам нужно закрепить кнопки на стенки робота (см. схему).
Правда, по этим кнопкам, как таковым еще попасть нужно. Я решил эту проблему, распечатав на 3D-принтере задний бампер. На фото он черного цвета с квадратными отверстиями. Они нужны для того чтобы не перекрывать воздухозаборник пылесоса.
Надеюсь, мне удалось сформировать у вас представление об этом проекте, подробностей очень много, и мне гораздо проще будет рассказать их в видео-формате, поэтому можете посмотреть первую часть видео по этому проекту, а так же подписаться на мой канал, чтобы не пропустить продолжение.
Спасибо за внимание!
Использованные компоненты: 2 резистора на 1 кОм, Конденсатор 25В 2700 мКф, Шнур USB, Модуль воспроизведения записей с флэхи DFPlayer MINI MP3, флешка micro-SD я использовал 16 гб, Динамик на 3 Вт 4 Ом, Тактовые кнопки 4 шт, Герконы 2 шт, магнитики маленькие какие найдете 2 шт, ИК датчик HW-201 (3 шт), Датчик движения PIR HC-SR501 (2 шт), УЗ дальномер HC-SR04, Плата Ардуино UNO, Макетная плата (лучше потом на паечную перенести), Аккумуляторы литий-ионные 3,7 вольт 2200 мАч 2 шт, фоторезисторы 2 шт, резисторы 1,5 ом может быть несколько, модуль зарядки ТP 4056, повышайка с 3,7 до 5 вольт, несколько деталей на 3д принтере
Робот-пылесос – нужная машина. Но у нее есть один существенный недостаток – цена.
Хорошая модель стоит недешево, а дешевая модель больше напоминает игрушку, но за нее тоже нужно заплатить определенную сумму.
Поэтому народные умельцы предпочитают собирать такие системы самостоятельно, благо в продаже для этого есть все комплектующие.
Многие из них охотно рассказывают, как сделать пылесос-робот своими руками.
Самое важное в этом деле, кроме необходимой базы запчастей, — почувствовать себя настоящим конструктором и не бояться экспериментировать. А получившуюся модель всегда можно улучшить.
Материалы для сборки робота-пылесоса в домашних условиях
Перед тем, как сделать робот-пылесос, нужно подготовить все необходимое.

- Ножницы;
- Циркуль;
- Простой карандаш;
- Линейка;
- Пистолет для термоклея;
- Две трубки термоклея.
- Гофрированный картон размером 1.5х1.0 м;
- Марля размером 0.3х0.3 м;
- Резинка для банкнот.
- Два блока колес;
- Плата ARDUINO UNO;
- Драйвер двигателя L298N;
- Два мотора на метелки по 12 В;
- Датчик приближенности для Ардуино ультразвуковой;
- Блок аккумуляторов;
- Кулер от компьютера из системного блока;
- Опорное колесо.
Как сделать робот-пылесос своими руками в домашних условиях
Когда все комплектующие и материалы в наличии, следует преступить к сборке.

Общий план таков:
- Вначале собирают корпус – здесь каждая деталь оригинальна и изготавливается отдельно;
- Следующий этап – установка Ардуино для робота-пылесоса своими руками и другой электроники, блока аккумуляторов и коммутация их проводами;
- В корпус устанавливают приводы – это колеса и моторы боковых щеток;
- Далее изготавливают всасывающий узел и крепят его к корпусу;
- Крепят самодельные боковые метелки;
- Программируют устройство и проводят полевые испытания;
- Если все работает, закрывают корпус верхней панелью.
Сборка корпуса из картона и установка Ардуино
Как сделать робот-пылесос, начиная с корпуса:
Изготовление всасывающего модуля с турбиной
- Из картона делают прямоугольный канал без торцовых частей, размер которых равен размеру основания кулера. Высота канала 25 см;
- Посередине канала под наклоном 30 градусов вклеивают перегородку. С верхней стороны наклона должен быть зазор шириной 2 см между перегородкой и стенкой канала;
- Изготавливают маленькую коробочку без крышки с размером сторон равным размеру перегородки и высотой бортов 5 см и устанавливают ее на перегородку;
- Под перегородку в низ основания канала вставляют и вклеивают кулер так, чтобы он дул на перегородку;
- На верхнюю часть канала надевают кусок марли, и свободные концы фиксируют резинкой для банкнот вокруг канала;
- Канал стороной кулера приклеивают напротив отверстия в середине основания пылесоса;
- В верхней панели вырезают прямоугольник под канал и надевают сверху.
Коммутация схем и настройка программы
После того, как установлены все элементы, питание колес подключают на драйвер колес на соответствующие управляемые разъемы. Моторы метелок подключают к выводам, где появляется постоянное напряжение при включении тумблера.

Тумблер впаивают между батареей и питанием схемы Ардуино. Схему датчика приближения подсоединяют к Ардуино. При включении тумблера пылесос начнет двигаться по площади, обходя предметы.
Настройка платы заключается в регулировке скорости (величины подачи напряжения на ведущие колеса), которая не должна превышать 30-25 см/с. Чтобы аппарат не ехал куда не нужно, можно подумать, как сделать виртуальную стену для пылесоса-робота своими руками.
Сборка корпуса из пластика и фанеры
Как сделать робот-пылесос не из картона, а, например, из пластика и фанеры? Очень просто.
В этом случае нижнюю часть вырезают из 4 мм фанеры при помощи электролобзика (размеры аналогичны вышеописанным).
В качестве торцовой части корпуса и верхней крышки можно использовать пластиковое ведро из-под фасадной краски (диаметр не должен превышать основания). Его обрезают так, чтобы высота с дном не превышала 20 см.

После того как на нижней части установят все оборудование и на ведре закрепят датчик приближения, ведро переворачивают и прикрепляют к основанию при помощи уголков.
Изготовление системы всасывания пыли
Турбину для робота-пылесоса своими руками в этом варианте конструкции можно изготовить по-иному принципу:
- В качестве емкости пылесборника берут пластиковую емкость (объем — 1 литр);
- В дне емкости посередине делают прорез шириной 1 см и длиной 10 см;
- Из прозрачного файла для бумаги вырезают прямоугольник шириной 3 см и длиной 12 см;
- Этим прямоугольником накрывают прорезь внутри емкости и фиксируют пленку с одной стороны скотчем на всю длину (12 см);
- Получается клапан, который при втягивании воздуха внутрь емкости открывается, а при выключении пылесоса перекрывает канал;
- В крышке от емкости делают отверстие, по диаметру равное диаметру крыльчатки вентилятора;
- Вентилятор крепят к крышке с внутренней стороны, с наружной – наклеивают мелкую пластиковую москитную сетку;
- Крышку ставят на место – турбина готова.
Как и в предыдущем варианте робота-пылесоса, после проведения всех работ по коммутации устройств между собой, необходимо провести настройку прибора.

Эта настройка заключается в выборе скорости движения машины. Отвечает за эту функцию драйвер двигателя.
Заключение
Рассмотренные самодельные модели роботов-пылесосов хороши для проведения быстрых уборок, когда нужно подмести полы.
Чтобы подобные аппараты могли хорошо втягивать и пыль – недостаточно обычного вентилятора от компьютера.
Нужно использовать более мощные моторы, например, от фена, и лопасти нужно изготавливать другой конструкции.
В этих же моделях для лучшего эффекта всасывания нужно соблюсти расстояние от дна до пола не более 1 см.
Робот-пылесос самодельной конструкции нельзя использовать в местах, где есть возможность падения его с высоты.
В простой системе не предусмотрены датчики контроля уровня пола. В сети имеются лайфхаки как сделать пылесос-робот моющим.
Роботы-пылесосы уже совсем не роскошь и цены на них постоянно падают, но покупать готовое устройство и делать его самому - разные вещи.
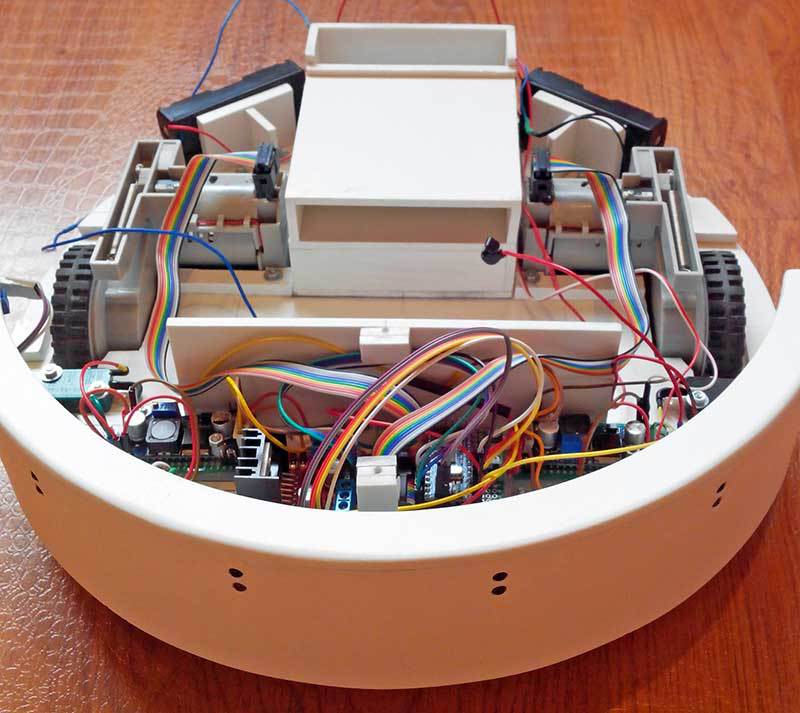
Конструкция робота пылесоса приближена к промышленным аналогам т.к. они используют такие датчики для ориентирования в пространстве.
Робот имеет два колеса с независимым приводом с помощью которых он движется и разворачивается. Что бы избегать припятсвий в корпус вмонтированы 6 ик датчиков. Для увеличения надежности определения стен сделан подвижный бампер с двумя микро выключателями (ик датчики плохо реагируют на черные поверхности).
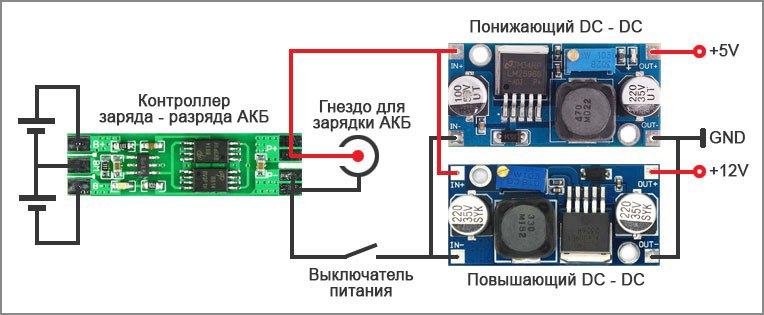
В качестве батареи использовалась четыре аккумулятора формата 18650. Подключены последовательно, что бы получить 12 вольт на питание двигателей. Вентилятор для всасывания пыли тоже 12-и вольтовый. На схеме есть контроллер заряда, он позволяет избежать повреждения аккумуляторов и имеет понижающую линию для питания Arduino +5 вольт.
Компоненты для сборки: Arduino Pro, L298N драйвер мотора, два мотор-колеса, плата контроля заряда, ИК датчики 6 шт, куллер-турбина, ПВХ пластик для изготовления корпуса, АКБ 18650 4 шт., 2 моторчика для щеток, 2 микро выключателя столкновения
Относительно недавно в продаже появился робот-пылесос, который существенно упрощает процедуру уборки. Подобное устройство может в автоматическом режиме проводить сбор пыли и мусора. Собрать робот-пылесос своими руками в домашних условиях можно при применении специальных деталей и подручных материалов.

Теория
Самодельный робот-пылесос должен соответствовать различным требованиям. Основными можно назвать:
- Рекомендуется изготавливать конструкцию в форме небольшого цилиндра. Она исключает вероятность того, что устройство зацепится за различные объекты в помещении.
- Устройство должно разворачиваться на одном месте. Для этого нужно сделать колеса по периметру: 2 ведущих и 1 управляющий.
- Внутри конструкции должен располагаться приемник для мусора. Его форма и крепление должны обеспечивать легкое извлечение. При изготовлении контейнера часто применяется картон, верхняя крышка крепится магнитами. Предусматривается наличие фильтрующего элемента.
- Контактный бампер требуется для защиты пылесоса от ударов. Внутри этого элемента располагается датчик, срабатывающий при соприкосновении. Бампер изготавливается из поливинилхлорида, с наружной части может крепиться упругий материал.
- По периметру размещены ИК-датчики. Они предназначены для определения препятствий на пути.
- Зарядка устройства должна проводиться без разбора конструкции. Контроллер заряда позволяет исключить вероятность повреждения аккумулятора.
- Наилучшим местом для размещения центра тяжести являются колеса.
- Больше всего внимания уделяется выбору требуемого мотора. Он должен потреблять небольшое количество энергии, быть надежным.

Создать подобную конструкцию можно самостоятельно. Процесс делиться на несколько основных этапов:
- Подготовка требующихся материалов и инструментов.
- Изготовление основных частей.
- Монтаж датчиков, мотора, аккумулятора и других элементов.
- Выполняется электрическое подключение.
- Вводится требуемая программа, согласуется работа всех установленных датчиков.
Финишный этап предусматривает проверку работоспособности самодельного устройства.
Необходимые инструменты и материалы
Для изготовления самодельной конструкции требуются материалы и набор инструментов. Они следующие:
- Контролер типа Arduino с соответствующими драйверами. Этот элемент можно приобрести в специализированном магазине. Контроллер после установки рекомендуется защитить от воздействия окружающей среды.
- Лист фанеры применяется для создания основания. В некоторых случаях изготавливается корпус из поливинилхлорида, т. к. этот материал более надежный в применении.
- Для обеспечения подвижности устанавливается 3 колеса. Они должны быть небольшого размера, поверхность изготавливается из материала с высокой степенью сцепления.
- Провода сечением 0,75 мм² нужны для соединения отдельных элементов. Компактность конструкции определяет то, что требуется относительно небольшое количество провода.
- Блок питания представлен 4 аккумуляторами по 18V. Также уделяется внимание тому, какие используются зарядные устройства. На момент работы источник питания может нагреваться до высокой температуры. Поэтому батареи должны быть изолированы от других материалов.
- 4 инфракрасных и 2 контактных датчика используются для определения положения устройства. Инфракрасные размещаются по периметру, контактные располагаются внутри бампера.
- Клей, саморезы и другие крепежные элементы.
- Набор отверток, паяльник, нож, карандаш, шуруповерт и некоторые другие инструменты.

Картонный элемент изготавливается для получения основания. Щетки по бокам существенно повышают эффективность создаваемого устройства,
Чертеж
Самостоятельно изготовить чертеж сложно, его проще скачать с интернета. При выборе наиболее подходящего проекта уделяется внимание следующим моментам:
- Размеру пылесоса. От этого показателя зависит эффективность устройства. Рекомендуемый диаметр составляет 30 см, высота не более 15 см. В противном случае пылесос не сможет собирать пыль под невысокой мебелью.
- Размещению колес. На момент движения пылесос должен быть устойчивым. Рекомендуется создавать 2 ведущих, которые расположены параллельно, а также 1 управляющий, за счет которого проводится поворот устройства.
- Размеру контейнера для пыли и мусора. Этот элемент является основной частью конструкции.
- Расположению других элементов пылесоса.

При применении чертежа можно создать качественное устройство, которое сможет прослужить в течение длительного периода. Многие элементы самодельного пылесоса-робота придется приобрести в специализированном магазине.
Сборка
После подготовки всех требуемых материалов и инструментов можно провести непосредственную сборку робота-пылесоса. Инструкция выглядит следующим образом:
- Корпус диаметром 30 см создается из картона или поливинилхлорида. Рекомендуемая толщина стенок составляет 0,6 см, высота 9 см. Рекомендуется создать основание из фанеры, которое будет прочным.
- На созданном основании размещается бампер, который изготавливается из поливинихлорида. Рекомендуется перед установкой провести крепление контактного и ИК-датчика.
- Из фанеры или картона проводится создание контейнера для мусора с крышкой, которая фиксируется при помощи магнитов.
- Для обеспечения высокой эффективности устройства устанавливается фильтр. Его можно приобрести в специализированном магазине или изготовить самостоятельно. Самодельный фильтр создается из тканевых салфеток.
- Турбина изготавливается из компьютерных дисков. Его предназначение заключается в создании всасывающего потока. Материал компьютерных дисков может прослужить в течение длительного периода, обладает требуемой легкостью и эластичностью.
- Датчик подключается к контроллеру. Его предназначение заключается в обработке поступающих сигналов.
- Двигатель соединяется с выбранным контроллером через транзистор. Оба элемента отвечают за вращение и медленное перемещение.
- Устанавливается 4 выбранных аккумулятора. Подключение проводится при применении параллельной схемы. При этом нужно учитывать, что аккумуляторы создают нагрузку, которая требуется для необходимой степени колес с напольным основанием.
- Выбранные щетки или самодельные устройства, изготовленные из лески, устанавливаются на дно. Крепление может проводиться при применении клея.
- После непосредственной сборки конструкции следует провести загрузку программы при помощи компьютера. В интернете встречается большое количество управляющих программ, которые можно скачать бесплатно. Стоит учитывать, что для подключения компьютера требуется специальный переходник.
- Проверяется надежность крепления всех элементов.

Отдельные элементы конструкции соединяются при помощи клея или саморезов. Бампер должен быть жестким, т. к. после удара о препятствие он должен возвращаться в исходное положение.
Тестирование
После сборки самодельной конструкции можно приступить к ее тестированию. На этом этапе уделяется внимание нижеприведенным моментам:
Читайте также: