
Робот на шести ногах своими руками
Добавил пользователь Владимир З. Обновлено: 05.10.2024
1. Итак, вы преисполнились решимости совершить прорыв в робототехнике и создать робота, способного ходить. И он должен быть двуногим, потому что мир людей — мир двуногих существ. С чего вы начнете в первую очередь?
2. Хорошо. С этим определились. Вы посмотрели разработки других компаний, роботы которых более или менее успешно справляются с ходьбой на двух ногах. Так в чем же основная сложность того, чтобы научить робота ходить?
3. Теперь все ясно. Нужно создавать программное обеспечение. Как вы это будете делать?
4. Отлично. С путем разработки программного обеспечения разобрались. Пора начинать конструировать. Сколько минимум нужно сервоприводов, чтобы создать простого двуногого робота?
5. А какую же конструкцию ноги для своего двуногого робота вы выберете?
6. С ногами тоже теперь все более-менее понятно. Но ведь нужно еще и видеть, куда идешь. Какие датчики системы технического зрения вы будете использовать в своем роботе?
7. А какое расстояние сможет пройти ваш робот, прогуливаясь по жилому кварталу Shagal?
8. Остался открытым вопрос с руками. Руки роботу приделывать будете?
Поздравляем, ваш результат: из
Создать робота у вас не получится. Вы плохо представляете себе принципы конструирования роботов. Да и сами, наверное, мало ходите.
Поздравляем, ваш результат: из
Скорее всего вы сможете придумать робота, худо-бедно его собрать, но ваша поделка сойдет разве что для школьного кружка юных техников. Далеко она вряд ли уйдет, если вообще сможет сдвинуться с места.
Поздравляем, ваш результат: из
Вы знаете, как должен выглядеть и функционировать двуногий робот, что нужно для того, чтобы его собрать. Ваш робот сможет ходить: с кочки на кочку в ямку — бух.
Попробуйте развить свое исследование ходьбы в жилом квартале Shagal. Здесь вы найдете все, что нужно для научных променадов: все объекты инфраструктуры находятся в 15 минутах ходьбы от жилых домов, а вдоль Москвы-реки простирается живописная набережная имени Марка Шагала — вторая по протяженности в Москве.
Поздравляем, ваш результат: из
С гордо поднятой головой и с роботом под руку (если она у него будет) вы легко можете прогуляться по набережной имени Марка Шагала в жилом квартале Shagal. Обдумать новые свершения в роботостроении можно на практичной прогулке по комплексу — например, до торгового центра или кинотеатра, которые всегда в шаговой доступности.

Нашли опечатку? Выделите фрагмент и нажмите Ctrl+Enter.
Петербуржские медики сравнили эффективность российских вакцин против дельты
Четыре сигнала Хунга-Тонга-Хунга-Хаапай
Как из Москвы выглядел взрыв вулкана в Тихом океане
Эволюционный успех ян-рукокрылых объяснили открытым каналом Розенталя
Появление Оленеостровского могильника связали с самым суровым голоценовым похолоданием
Транспортник со встроенной в обшивку антенной поднялся в небо
Пара аттосекундных импульсов запутала молекулярный катион и фотоэлектрон
Один китайский спутник отбуксировал другой на орбиту захоронения
Moderna и Pfizer запустили клинические испытания вакцин против омикрона
Археологи нашли в позднескифских погребениях бляхи в зверином стиле
Феноменология духа
Пара аттосекундных импульсов запутала молекулярный катион и фотоэлектрон
Физики создали радиевые оптические часы
Полупроводниковые кубиты вступили в квантовую гонку
Квантовое распределение ключей преодолело 830 километров оптического волокна
Немарковский теплообмен с резервуаром объяснил эффект Мпембы
Теория и эксперимент сошлись в описании зарядового радиуса изотопов никеля
Физики создали оптическую квантовую батарею на сверхпоглощении
Радиус протона измерили по переходу 2S−8D атома водорода
Солнечный свет сдвинул равновесие реакции в сторону продуктов
Самое сложное
© 2022 N + 1 Интернет-издание Свидетельство о регистрации СМИ Эл № ФС77-67614

Создавая шагающего робота, конструктор должен ответить на множество вопросов. Некоторые из них носят общий характер, но некоторые необходимо разбирать детально. В статье мы описали наиболее важные вопросы, связанные с дизайном и сборкой шагающих мобильных роботов.
Мы сосредоточились в этой статье на самом двигательном аппарате, и на возможных технических решениях, вытекающих из принятых допущений. Классификация шагающих роботов может варьироваться в зависимости от выбранных критериев.
Некоторые критерии тесно связаны, например, с количеством лап или ног, а также с возможными типами походки. Итак, давайте посмотрим на приведенные выше классификации.
Модели движения
Если движение шагающего робота похоже на походку животного, то такая модель называется биологической моделью. Конструирование таких роботов началось с наблюдения и попытки имитировать походку различных существ. На рисунке ниже показано типичное расположение лап насекомых, рептилий и млекопитающих.

Типичное расположение лап животных: а) рептилия, б) насекомое, в) млекопитающее.
Из рисунка виден важный критерий — это высота центра тяжести.
Типы ног
Другой критерий, связанный с биологической структурой, — это тип ног или лап. У робота могут быть одинаковые ноги, у него могут быть пары разных ног (по длине и / или форме). Это связано не только с их выбором, но и с возможными типами движения. Проще, и обычно дешевле, сделать робота с одинаковыми ногами.
Следующий, и последний критерий, связан с расположением ног по отношению к туловищу. Здесь снова у нас есть несколько вариантов:
лапы, расставленные симметрично по кругу

или лапы, расставленные по обеим сторонам робота, т.е. лапы находятся под телом — как у млекопитающего.

Своего рода стабильность
Еще один важный критерий — это тип устойчивости. Это неразрывно связано с количеством лап. Различают следующие типы устойчивости: статически стабильная походка, динамически стабильная походка и квазистатическая стабильная походка.
Статически стабильная походка
Статически стабильная походка — это походка, при которой робот может быть остановлен в любой момент, без потери равновесия. Классическим примером этого типа движений является походка шестиногих роботов.
Динамически стабильная походка
Противоположность этому типу движений — динамически устойчивая походка. В этом случае, только в определенные моменты движения, робот может быть остановлен, в другие, сохраняется стабильность походки за счет динамики движения. Остановка в такой момент приведет к опрокидыванию робота.
Квазистатическая устойчивая походка
Количество ног робота
В этом случае крепим любое количество ног. Их минимальное количество может быть равно нулю — в этом случае это будут, например, змееподобные ползучие роботы. Однако, когда мы говорим о педипуляторах (шагающих роботах), мы имеем в виду роботов с определенным количеством лап или ног — одной, двумя, четырьмя, шестью и более.
Одноногий или однолапый робот
В случае с одноногим роботом мы можем говорить только об одном виде походки — прыжках. Это динамический тип движения. Только благодаря большой мощности приводов, очень быстрой системе управления и датчикам, а также сложному алгоритму робот не опрокидывается при движении.

Двуногие роботы
Двуногие или двулапые роботы характеризуются динамически устойчивой походкой. Обычно ходят на согнутых ногах. Биологический образец таких роботов — человек.

Они также могут двигаться квазистабильным статическим движением. В этом случае структура ноги, а именно большая ступня, позволяет распределять баланс силы на большой площади, под которой также находится центр тяжести робота. Кроме того, относительно большая масса одной ноги позволяет балансировать вместе с телом во время движения и обеспечивает противовес туловищу.
Четвероногие роботы
Квадропеды — роботы с четырьмя ногами или лапами. В этом случае биологический образец обычно — млекопитающие или рептилии. Эти роботы могут двигаться как динамически стабильно (галопом), так и статически (перемещая одну ногу за один раз). Шестиногие роботы также могут двигаться как статически, так и динамически.
Таким образом, алгоритм движения является наиболее простым в программировании из всех перечисленных групп, единственная трудность может заключаться в большом количестве степеней свободы.
Многоногие роботы
Также есть группа многоногих роботов с более чем шестью ногами. В таком решении (до тех пор, пока мы должны контролировать каждую ногу отдельно) система управления усложняется. Эти роботы передвигаются статически стабильной походкой. Максимальное количество возможных шагов определяется формулой, приведенной Макги в 1968 году :
k — количество ног
N — количество возможных видов походки
! — означает факториал
Для молодых адептов робототехники, которые могут не знать эту математическую функцию — мы привели дополнительное пояснение:
! — факториал — это произведение всех чисел от 2 до n.
Пример:
6! = 2 ∙ 3 ∙ 4 ∙ 5 ∙ 6 = 720.
Для шестиногого робота результат формулы МакГи:
(2 ∙ 6-1)! = 11! = 39 916 800 возможных шагов.
Тип походки
Последний из этих критериев — тип походки. Приведенная выше формула дает максимально возможное количество шагов, но не все роботы могут двигаться всеми перечисленными способами. Это ограничение проистекает из используемых приводов, выбранного устройства движения и его ограничений, а также ограничений системы управления, особенно ее скорости.
Если у привода нет большого запаса мощности и динамики, то робот может двигаться только статически устойчивой походкой. Конструкция ног и механические связи между отдельными ногами (или степени свободы одной ноги) также ограничивают количество возможных аллюров. Это количество может быть ограничено одним типом.
Волновое движение очень популярно и легко реализуемо. Указанная здесь последовательность смены ног является циклической. Эту походку можно представить в виде диаграмм походок. Примеры схем представлены на рисунках ниже. Фаза движения ноги называется фазой вытягивания, а период, в течение которого нога соприкасается с землей, называется фазой рефрактерности. Эту походку еще называют периодической.
Примеры схем походки четвероногого и шестиногого роботов:
Эти походки используются на прямых и плоских поверхностях. Их преимущество — простота реализации. Другой вид — свободная походка — вольный стиль . В этом случае решение о том, какую ногу переместить и куда поставить, принимается постоянно. Такая походка требует сложного алгоритма управления, датчиков и быстрой системы управления. Её преимущество — очень широкий спектр применения — она подходит для использования на сложной местности.
Последний вид походки — это движение проводника. Следующая нога ставится на то место, где ранее находилась предыдущая нога. Её применение аналогично свободному движению.
Проектирование робота
При проектировании робота мы должны выбрать конкретный привод:
- электродвигатели
- пневматические приводы
- гидроцилиндры
У каждого из них есть свои достоинства и недостатки. В мобильных роботах (особенно любительских) чаще всего используются электродвигатели — электродвигатели постоянного тока или сервоприводы. Ими очень легко управлять, а для питания достаточно обычной батарейки. Оборудованные ими роботы могут быть автономными.
Другое дело ноги или лапы — их форма, длина, расположение, количество степеней свободы.
Важным вопросом является соотношение количества приводов к количеству опор. В простейшем случае — шестиногом роботе — мы можем использовать от двух до восемнадцати приводов. Два двигателя связаны с наибольшим ограничением количества возможных аллюров и большим количеством механических связей между ногами. Но во втором случае, если у нас по 3 привода на ногу, то с точки зрения робототехники это решение оптимально.
Примеры шестиногих роботов с двумя, тремя и восемнадцатью степенями свободы показаны на следующих рисунках:
На рисунке а показан робот с двумя степенями свободы. Механическая связь между ногами по обе стороны от робота позволяет ему двигаться вперед и поворачиваться. Система управления такого робота аналогична системе управления колесного робота с двумя независимо управляемыми колесами.
Робот с таким строением ног может двигаться только одним типом походки. На рисунке б можно увидеть конструкцию робота с тремя степенями свободы. В этом случае средняя пара ног уравновешивает робота так, чтобы две оставшиеся ноги с одной стороны были подняты вверх — они находятся в фазе вытягивания. При наклоне в другом направлении стороны меняются местами. Как видно на рисунке, внешние ноги с обеих сторон жестко соединены. Опять же, возможен только один тип движения, но он немного сложнее, чем в предыдущем случае.
Последний пример — робот с несколькими степенями свободы (рисунок в). Такое решение дает возможность независимо управлять подъемом и горизонтальным перемещением каждой ноги.
В случае 2 степеней свободы на ногу, один привод отвечает за вертикальное движение, а другой за горизонтальное. Разница между роботом с 2 степенями свободы на ногу и 3 степенями свободы на ногу в том, что в последнем случае можно двигаться боком (по типу краба). В первом поступательное движение может происходить только вперед или назад. В зависимости от запаса энергии приводов такое решение позволяет реализовать статическую походку (с малым запасом мощности) и динамическую походку (с большим запасом мощности).
На рисунках г, е можно увидеть роботов с одной степенью свободы. Конструкция ног идентична конструкции робота с двумя степенями свободы. Отличие заключается в конструкции трансмиссии и замене одного двигателя муфтой свободного хода, передающей вращение только в одном направлении.
Такое решение ограничивает возможные движения для ходьбы вперед и поворота в сторону ( рисунок е).
Расположение ног
Также немаловажным является размещение ног на теле робота. Чтобы робот не упал, надо помнить о положении центра тяжести. Это очень важно.
Опорный многоугольник — это многоугольник, вершинами которого являются точки, в которых ноги фактически соприкасаются с землей. Эта цифра меняется в каждый момент движения. Например, для четвероногого робота с симметрично распределенными ногами, когда все ноги соприкасаются с землей, опорный многоугольник представляет собой прямоугольник или квадрат; если одна нога поднята — многоугольник опоры становится треугольником.
При проектировании робота, который будет двигаться в статически стабильном движении, центр тяжести должен быть расположен таким образом, чтобы он никогда не выходил за пределы многоугольника. Чтобы повысить устойчивость и исключить влияние всех дополнительных динамических эффектов (например, сам факт движения ноги), применяется дополнительный запас прочности. Он заключается в построении ног и корпуса, при котором центр тяжести не приближается к сторонам многоугольника опоры.
Минимальное расстояние между ближайшей стороной текущего опорного полигона и центром тяжести называется статическим запасом устойчивости. Фигура, на следующем рисунке, показывает примерную последовательность опорных полигонов во время движения четвероногим роботом. На этом рисунке также показан центр тяжести робота.

Диаграммы походки
Наконец, мы хотели бы вернуться к вопросам схемы походки. Это не будет проблемой для роботов, которые могут двигаться только одним типом походки. Однако при разработке алгоритма походки робота с большим количеством степеней свободы, существует некоторая проблема.
Мы представили эту проблему на следующем рисунке а виде диаграммы. Существенным различием между двумя представленными вариантами является дополнительное пустое поле в периоде походки. В этот момент все ноги находятся на земле, а туловище выталкивается вперед на всю длину шага. Во время фазы стояния на одной ноге, другие движутся в обратном направлении 1/5 длины шага.

Системы управления — отдельная проблема. Простое перемещение даже роботов со многими степенями свободы и поддержкой нескольких простых датчиков расстояния может быть реализовано в восьмиразрядных микроконтроллерах. Написание программы на языках BASIC (bascom, BASIC stamp, BASIC micro) также не является большой проблемой для среднего опытного программиста.
Вывод
Надеемся, материал вам понравился. Не стесняйтесь узнавать больше о робототехнике, изобретать и конструировать собственных шагающих роботов. Конструкция такого робота доставит вам большое удовлетворение и гордость за себя, особенно когда заработает все как надо.
Робот – это поделка, которая приведёт в восторг детей любого возраста. Это может быть и игрушка, и украшение комнаты, и подарок. Существует множество техник изготовления различной сложности, а также из самых разнообразных материалов.
Как сделать поделку робота самостоятельно, и вместе с детьми, поделку робот из подручных материалов – читайте в этой статье.

Содержимое обзора
Бумажный робот
Для того, чтобы изготовить поделку робот из бумаги и картона, составьте схему будущего изделия. Также вам не обойтись без бумаги, ножниц, иголки или шила и клея. Для того, чтобы конструкция была устойчивой, потребуется картон.

Для соединения элементов возьмите резинки, а для декора робота приготовьте фломастеры.

Техника изготовления
- Когда вы будете использовать схемы роботов из интернета, обратите внимание на то, что сплошные линии обозначают место разреза ножницами.
- Пунктирные линии – это место перегиба материала.
- Игла необходима для того, чтобы делать отверстия в бумаге.
- Чтобы игрушка была прочной, приклеивайте детали с помощью клея ПВА.
- Итак, все этапы работы с картоном – распечатка схемы из интернета, затем вырезайте детали строго по инструкции, следуя пунктирным линиям согните элементы, используйте клей ПВА для соединения частей робота.















Спичечные коробки как оригинальный материал
На представленном фото поделки робота вы видите игрушку, которая выполнена из спичечных коробков. Такая поделка робот отлично подойдёт как конкурсная работа в детском саду.
- Вам потребуются девять коробков из-под спичек, бумага разных цветов, клей.
- Сначала возьмите пять коробков и каждый обклейте цветной бумагой. Это будут туловище голова и руки робота.
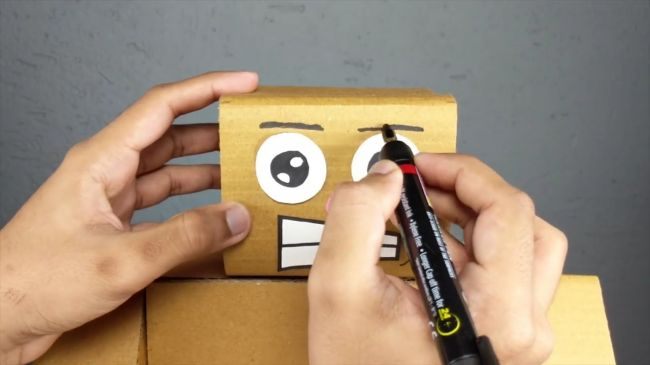
- С помощью маркеров нарисуйте лицо на голове.
- Теперь склеивайте оставшиеся четыре коробочки и приклейте цветную бумагу на верх этой конструкции.
- Соберите всего робота и украсьте изделие как вам захочется.

Поделка в школу
Отличная поделка робот в школу – это изделие, выполненное из пластиковых бутылок. Для того, чтобы выполнить такую поделку робот своими руками, возьмите бутылки из пластика объёмом до литра, а также материалы, с помощью вы будете декорировать поделку и скотч.







Особенно оригинальной получится поделка, если взять бутылки различных оттенков.

Порядок работы
- Объедините вместе три бутылки, склеив их скотчем.
- Затем возьмите ещё три бутылки и скрепите их аналогичным образом. Объедините вместе эти заготовки, и у вас получится туловище робота квадратной формы.
- Теперь изготавливайте голову – для этого вам подойдёт бутылка, разрезанная пополам.
- Возьмите нижнюю часть. Приклеивайте её к основной конструкции при помощи клеевого пистолета или скотча.
- Настало время изготовить ноги робота, от них будет зависеть, насколько устойчивой получится поделка. Одна нога – это две пластиковые бутылки, скреплённые скотчем.
- Используйте клеевой пистолет либо скотч, чтобы прикрепить ноги к роботу.
- Для того, чтобы изготовить руку, берите фрагмент бутылки, кисть руки вырезайте из кусочка пластика.
- Другой кусок пластика, побольше, сверните в трубку и закрепите при помощи скотча. Прикрепляйте руки к роботу также при помощи скотча либо клея.
- Переходите к декорированию поделки. Глазами робота могут служить крышечки от бутылок. Рот можете нарисовать маркерами.

Можете добавлять другие детали, всё зависит только от вашей фантазии.
















Мягкая игрушка-робот
Отличный подарок ребёнку или работа для детского конкурса поделок.

Возьмите флис или фетр и вырезайте детали квадратной формы:
- Первая для туловища – четыре с половиной сантиметра, три с половиной сантиметра – для шитья головы робота, ноги сшейте из квадратов размером два сантиметра, полтора сантиметра – для рук.
- Шесть квадратов нужно для того, чтобы изготовить одну часть тела.
- Каждый выкроенный элемент необходимо прошить так, чтобы получилась деталь кубической формы.
- До того, как вы прошили деталь полностью, набейте её ватой или синтепоном. Далее сшивайте все детали, собирая робота.
- Глазки можно сделать, пришив бусины, также можете украсить игрушку, пришив бантик, вышив ресницы.
- Если игрушка будет маленького размера, можете выполнить её в виде магнита или брелка.







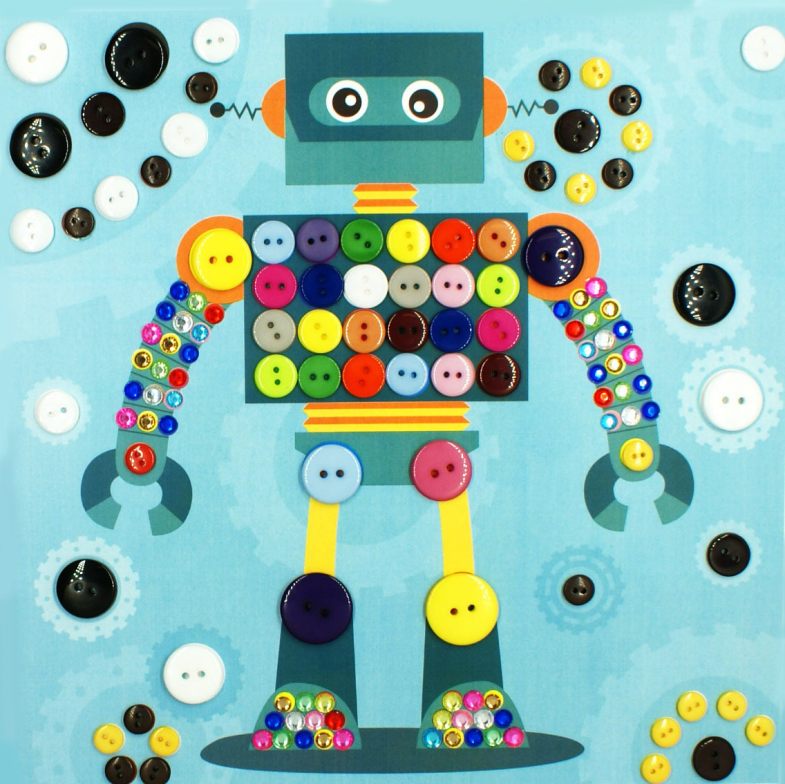
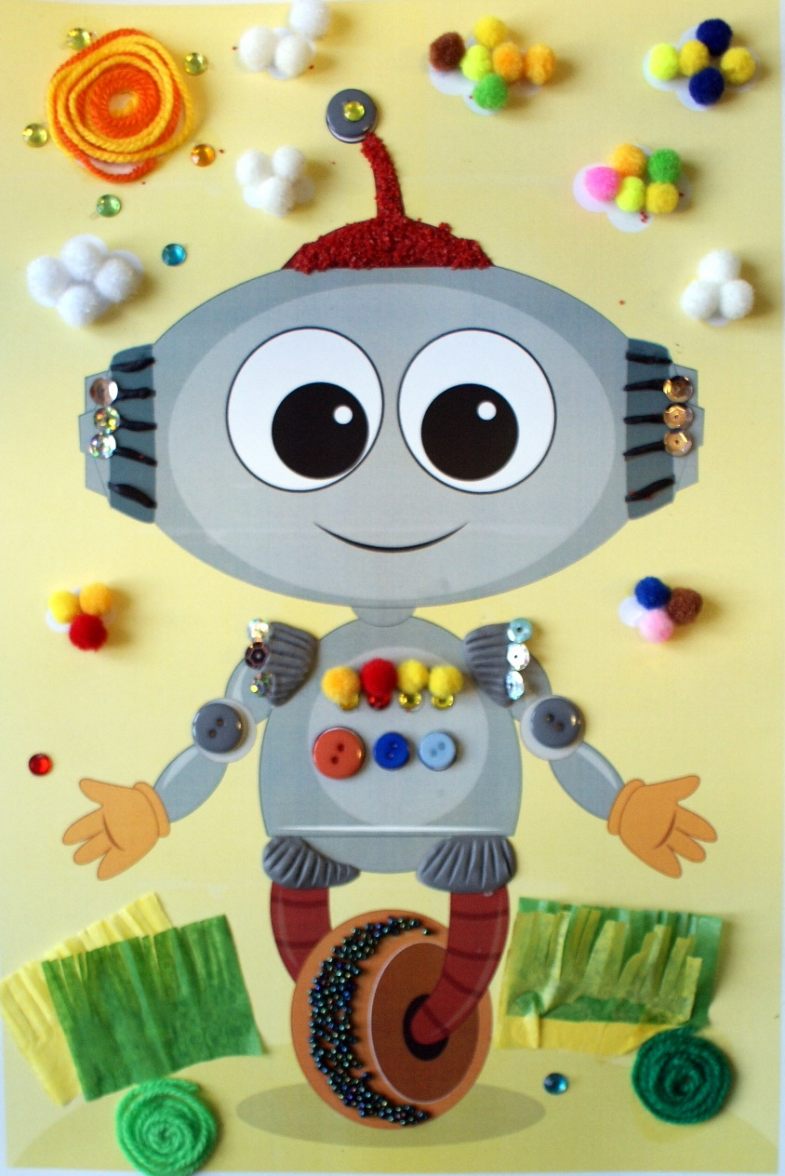
Аппликация робот
Очень простая поделка, с изготовлением которой легко справятся даже дети младшего возраста.
- Нужно прорисовать , а затем вырезать геометрические фигурки, которые будут необходимы для создания изображения.
- Это могут быть круги, прямоугольники, квадраты – всё, что пожелает нарисовать ваш ребёнок.
- Затем возьмите клей-карандаш либо клей ПВА и приклеивайте заготовки на бумагу.
- Должно получиться оригинальное изображение робота.
- Дорисуйте по желанию фон, прорисуйте маркером детали изображения.

Это упражнение отлично развивает мелкую моторику ребёнка, а также цветовосприятие, аккуратность и воображение.






Бижутерия робот
Если вы любите оригинальную бижутерию – вам отлично подойдут серьги в виде роботов, выполненные своими руками.
- Для этого понадобится минимум материалов – только проволока и крупные бусины.
- Сначала вам необходимо разрезать проволоку на несколько частей.
- Скручивайте проволоку в спирали – они должны быть достаточно плотными. Для этого накручивайте проволоку на стержень.
- Проволока, четыре спиральки, а также две бусины – это набор элементов, из которых вы сформируете головку робота.
- Кончик проволоки проденьте в бусину и разогните, чтобы сформировать ручки. Одна рука – это пара спиралек, а также четыре бусины маленького размера.
- После того, как вы сложили ручки, переходите к изготовлению туловища и ног. Кончик проволоки продевается в бусину.
- Нога – это пара спиралек а также бусинка маленького размера. Вторая серёжка выполняется аналогично.
- Итак, стильная и необычная бижутерия готова!

Следуя всем этим советам, вы легко изготовите множество интересных поделок. Среди них будут и украшения для интерьера, и поделки в школу либо в детский сад, и даже интересные дизайнерские серьги.

А главное, у вас появится возможность организовать совместный досуг для всей семьи.

Своими руками

Робот из бумаги, картона, коробок
Аппликация
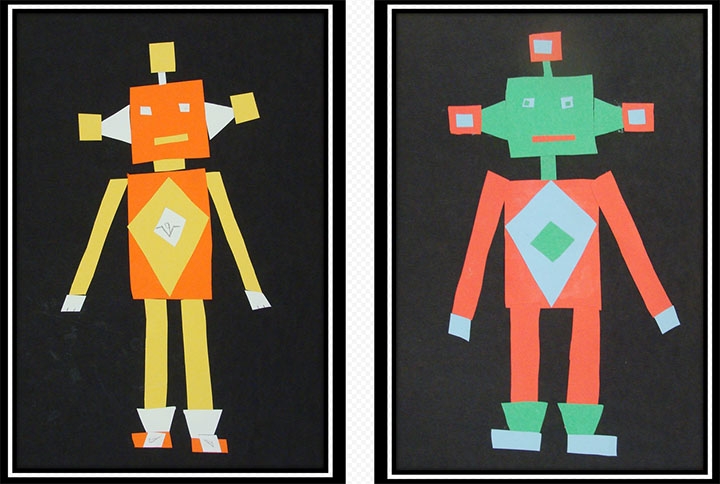
С задачей справится ребенок от 3-х лет и старше. Заранее нужно подготовить шаблоны, цветную бумагу, ножницы и клей. Шаблоны можно нарисовать самим или скачать в интернете. Несколько примеров:



Шаблоны распечатывают, переносят на цветную бумагу, каждую деталь вырезают. Можно пронумеровать все элементы, чтобы было понятно, в каком порядке их наклеивать на основу.

В качестве основы для аппликации рекомендуется использовать плотный материал:
- картон – белый, цветной, бархатный;
- гофрированную или плотную глянцевую бумагу;
- обои, оставшиеся после ремонта.
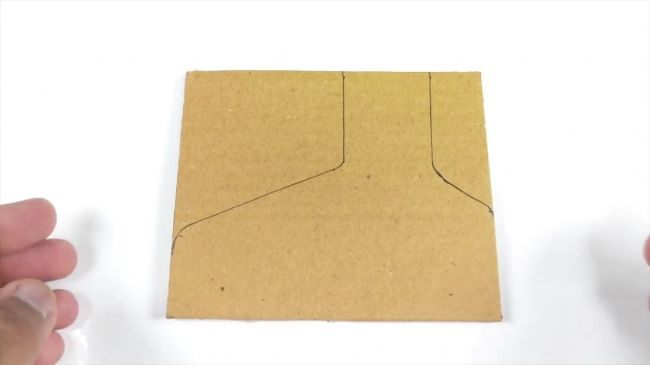
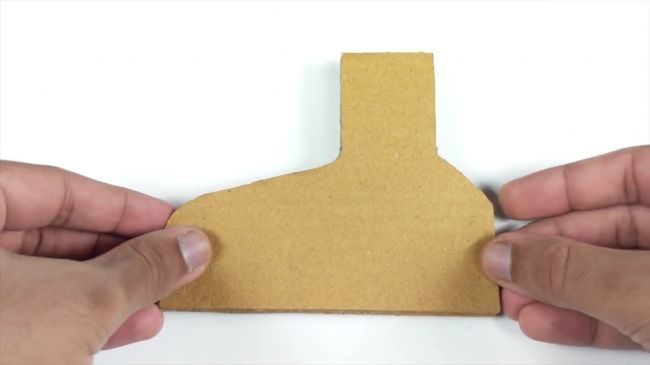
Робот из картона
Из этого материала можно сделать своими руками объемные фигурки. Более того, поделка может быть как монолитной, так и подвижной. Как и для аппликации, нужно подготовить шаблон. Его сложность в плане сборки подбирается под возраст и навыки ребенка. Примеры:


Для работы, кроме картона, будут нужны:
- простая белая бумага для распечатки шаблона;
- клей для бумаги в виде карандаша;
- фломастеры или карандаши с мягким грифелем.
Шаблон распечатывают на простой бумаге, наклеивают на картон. Заготовку необходимо прогладить линейкой несколько раз по всей площади, чтобы элементы плотно прилегали друг к другу, хорошо проклеились.


Из спичечных коробков
Пустые коробки от спичек большинство из нас выбрасывают, а ведь из них можно сделать чудесную поделку. К примеру, чтобы собрать робота, понадобится всего 15 таких заготовок. Работа с ними не сложная, а вот пользы масса – из бросового материала получится прекрасная поделка, а ребенок лишний раз проработает мелкую моторику, увлечется полезным делом на полчаса-час.


Оклеиваем коробки и приступаем к нарезке деталей для туловища, головы. Туловище собираем из двух элементов – вертикального и горизонтального. Три коробка соединяем меж собой и оклеиваем полоской бумаги 17*5,2 см, 4 коробка (для плеч) – полоской 25*5,2 см. Голову собираем из двух коробков. Для нее понадобится полоска 15*5,2 см.
Заключительный шаг – скрепляем вместе части тела, на голове рисуем карандашами глазки и ротик. Работа завершена, ее нужно хорошенько просушить и можно выставлять экспонат на выставку.
Можно сделать киборга из спичечных коробков с подвижными руками и ногами.
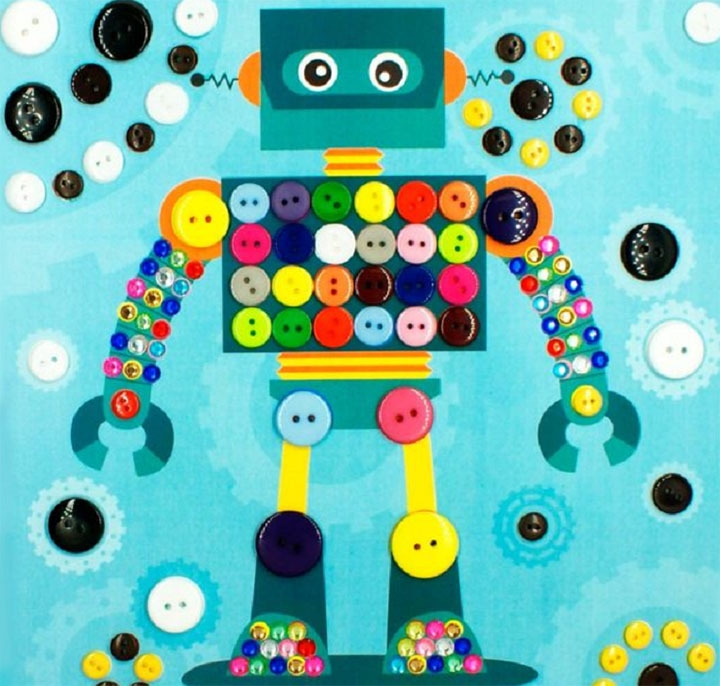
Робот из пластиковых крышек

Количество заготовок зависит от того, какого размера будет поделка. Как правило, достаточно 22-30 штук. Они могут быть и одного цвета, и разноцветными. Главное – одинакового размера.

Предварительно их нужно подготовить – сделать в них своими руками отверстия с помощью нагретого над открытым огнем шила. Этим должны заниматься взрослые.
17 штук протыкаем по центру, 5 штук – по бокам и по центру. Делаем это так, чтобы боковые отверстия находились точно друг против друга.

Можно приступать к сборке отдельных деталей с помощью обычной портновской резинки, продевая ее в отверстия в крышках и плотно стягивая элементы фигурки.

Делать это удобно с помощью вязального крючка или проволоки. Закрепить каждую деталь поможет узелок на конце резинки. Когда детали готовы, собираем их воедино.
Из консервных банок

Если решено сделать киборга на основе консервной банки, то ее сначала нужно тщательно вымыть. Работать необходимо в перчатках, чтобы не поранить руки. Дети могут заниматься с такими материалами только под присмотром взрослых.
Первый этап – подготовка банки. Ее верхнюю крышку срезают вплотную к стенкам, затем осторожно пробивают край молотком, чтобы не осталось острых зазубрин.

Основу тщательно промываем и снаружи, и изнутри. Если планируется красить ее, то нужно еще и обезжирить. Для этого подойдет любое средство на основе или с содержанием спирта. Верхний край банки можно оклеить плотным скотчем, чтобы сделать карандашницу абсолютно безопасной.
Приступаем к декору. Понадобятся мелкие магниты, болтики и гаечки. Именно они будут играть роль глаз, рта, рук робота. Элементы отделки можно крепить на магниты или прикрутить, просверлив отверстия в основе.

Декорировать можно не только металлическими элементами, но и детальками от детского конструктора, сломанных машинок и других игрушек. Их крепим с помощью клея моментального действия.
Робот из фетра
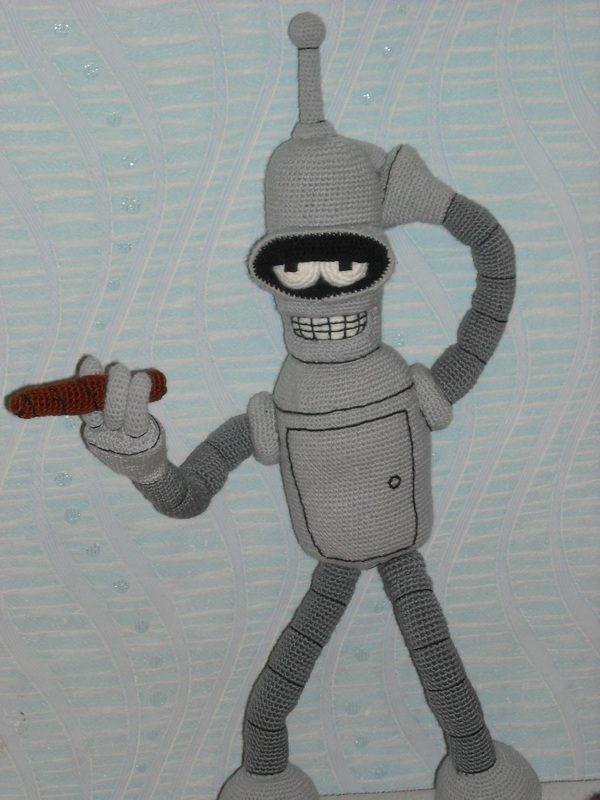
Некоторые девочки увлечены техникой не меньше, чем мальчики. Можно предложить им сделать своими руками киборга из фетра. Такая поделка, созданная девочкой на выставку, к примеру, в детсаду, обязательно займет призовое место.

Робот будет состоять из фетровых кубиков, набитых любым наполнителем – вата, синтепон, нарезанный на мелкие кусочки поролон или обрезки тканей.
Кубиков должно быть 6 – два примерно одинаковых для туловища и головы, 4 одинаковых для рук и ног. Каждый кубик сшиваем из 6 квадратов.

Рекомендуемые размеры кубиков (длина одной стороны) для робота:
- тело – 7,5 см;
- голова – 5,5 см;
- ножки и ручки – 2 см.
Сделать текстильного киборга можно не только из фетра, но и из других плотных тканей, к примеру, твида, джинсы.

Лицо игрушки оформляем с помощью готовых элементов из магазина рукоделия, бусин и кусочков ткани, или прорисовываем фломастером, маркером.
Костюм робота
Костюмы из коробок, комбинезоны, имитирующие киборгов – это скучно. Сделайте своему ребенку наряд для маскарада из теплоизоляционного покрытия с алюминиевым напылением. Вариант бюджетный, не потребует временных затрат, делать его просто и быстро.

Кроме теплоизоляционного материала, для работы нужны:
- серебряная атласная лента шириной не менее 2 см длиной 2 м;
- лента-липучка – 40-50 см;
- ножницы;
- нитки, иголки.
Костюм будет состоять из 6 элементов – шапочка, жилетка, нарукавники и наколенники.

Вырезаем жилет. Центр детали – горловина.

В длину она должна быть равной двум меркам от плеча до талии (ДСТ). По ширине – мерке ширина плеча (ШП) + 10-15 см.

В горловину, вырезанную в центре детали, должна легко проходить голова ребенка.
Из термоизоляции вырезаем пояс шириной 7-10 см, пришиваем его к жилету, оставив сбоку разрез. К краям пояса пришиваем ленту-липучку – это застежка.


Нарукавники и наколенники – прямоугольные куски теплоизоляции с пришитыми элементами ленты-липучки.
Такой костюм надевается поверх однотонных штанишек и водолазки. Его можно декорировать яркими элементами из мишуры, блесток, если малыш идет в нем на новогодний маскарад.

Робота можно сделать своими руками из чего угодно, из любых материалов, деталей, оказавшихся под рукой. Фантазируйте, ошибайтесь, переделывайте, дополняйте.
Читайте также: