
Режекторный фильтр своими руками
Добавил пользователь Валентин П. Обновлено: 05.10.2024
Сборка печатных плат от $30 + БЕСПЛАТНАЯ доставка по всему миру + трафарет
Есть, это называется : фильтр-пробка. Раньше широко применялся в магнитофонах для вырезания частоты подмагничивания. Но там частоты примерно в 40 - 60 кГц. Но можно подобное сделать и на МГц. в "железе" это выглядит как LC - контур, настроенный на нужную частоту.
Применение полупроводниковых приборов на основе карбида кремния (SiC) производства Wolfspeed в высокочастотном резонансном LLC‑преобразователе позволяет уменьшить на 50% массогабаритные показатели преобразователя и снизить на 30% потери мощности в магнитных компонентах. Максимальный КПД преобразователя с выходом 400 В/16 А на частоте 500 кГц при этом достигает 98,5%.
Если это возможно то я хочу собрать полосовой фильтр на ОУ, пропускает сигналы от 2,13 МГц до 2,15Мгц, и подавляет центральную - 2,14МГц. Вот такая вот муть. Попробую для начала собрать полосовой фильтр, а на выход поставить колебательный контур который будет реагировать на 2,14МГц и заземлить ее, думаю получится нужный график. График в моих фантазиях представляется что то типа буквы М. два резонанса на 2,13 МГц и 2,15 МГц, а центральная погашена. Если есть советы не ленитесь напечатайте. буду очень благодарен!)
Компоненты и решения Littelfuse обеспечат надежную работу и долгий срок службы умных счетчиков электроэнергии, газо- и водоснабжения. Обширная номенклатура, включающая в себя герконы семейств MDCM-4, MDSR-10 и MDSM-10, твердотельные реле PLA19x, CPC1хxх и СPC5хxх, тиристоры SIDACtor®, диодные сборки, термисторы, MOSFET/SiC MOSFET, TVS-диоды, плавкие и самовосстанавливающиеся предохранители и другие компоненты, соответствует современным требованиям, что упрощает проектирование и сертификацию современных интеллектуальных счетчиков коммунальных услуг.
2мГц для ОУ многовато,но всё-же возможно
что бы что то посоветовать надо бы знать величины желаемых подавлений,а не только форму
что то типа буквы М имеет даже двухконтурный фильтр со связью выше критической,
но вряд ли это то что Вам нужно
Что бы сделать это с помощью обычного контура, его нагруженная добротность должна быть порядка 200, что конструктивно не совсем осуществимо.
Думаю, точнее повторяю, что аналоговыми способами вырезать такую узкую полосу составляющую всего лишь меньше 0,5% от центральной можно только или с помощью регенеративного заграждающего фильтра (Q-умножителя в режиме режекции) но это очень нестабильная система.
Или вместо контура поставить кварц на нужную частоту.
Подобным образом иногда вырезают несущую сигнала для получения SSB

Там на картинке еще есть способ вырезания частоты, но вероятно это Вам не подойдет.
Насчет ОУ, что то я сомневаюсь, что можно получить такую узкую полосу режекции составляющую меньше 0,5% от центральной.
Обычным контуром можно попробовать вырезать перенеся спектр на более низкую частоту и вырезав контуром на этой низкой частоте, а потом снова перенести этот спектр на нужную Вам частоту.
В этом случае колебательный контур будет более реальный и вырежет нужные Вам 10 кгц

Господа гляньте что программа показывает, примерно то что я хотел. но в реале как это собрать вопрос конечно.
режекторный фильтр для удаления горбов АЧХ динамика.
пересмотрел много схем кроссоверов и практически ни где не встречал фильтров такого вида
в симуляторе(LspCad ) всё работает очень эффективно.
может есть какие подводные камни для таких фильтров ?
Есть. Нужно следить за импедансом на частоте настройки режектора, чтобы усилителю не стало нехорошо. И многие утверждают, что режектор звучит. Как консервная банка .

где x(n) – последнее измерение сигнала, а x(n-1) и x(n-2) – два предыдущих измерения, y(n) – текущее отфильтрованное значение сигнала, а y(n-1) и y(n-2) – два предыдущих значения отфильтрованного сигнала.
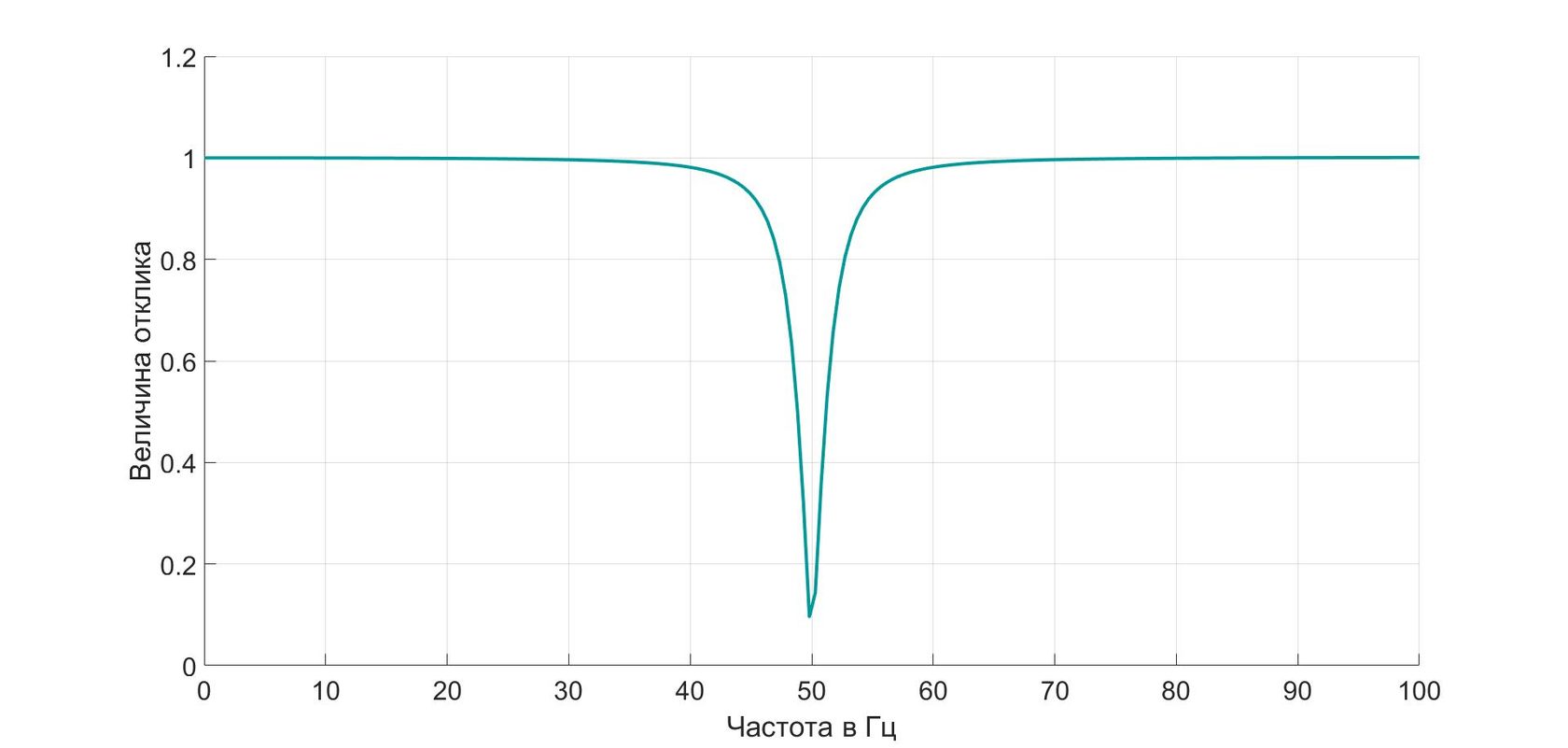
Рис. 1: Амплитудно-частотная характеристика фильтра
(частота дискретизации сигнала 500 Гц, частота режекции 50 Гц, окно режекции 46-54 Гц).
Аналоговый режекторный фильтр может быть создан несколькими способами. С учетом современных тенденций схемотехники, желательна реализация на микроэлементной базе. В связи с этим катушки индуктивности и конденсаторы достаточно большой емкости не должны присутствовать в схеме. В этом случае подойдет схема режекторного фильтра на основе гиратора (Рисунок 9), который благодаря инверсии импеданса позволяет обойтись без катушек индуктивности.

| Рисунок 9. | Принципиальная схема режекторного фильтра на основе гиратора. |
Частота режекции здесь равна:
Если задаться R1 = R3= 500 кОм, R2 = 250 кОм, RA = RB = 100 кОм, CA = 50нФ, f = 2500 Гц, то значение емкости CB, преобразовав (4), можно определить как:
Также существует настраиваемый режекторный фильтр Роберта Пиза, изображенный на Рисунке 10.
| Рисунок 10. | Принципиальная схема режекторного фильтра Роберта Пиза. |
Частота режекции для этой схемы равна:
Аналогично предыдущей схеме, задавшись R1 = R2 = R3 = 100 кОм, f = 50 Гц, преобразовав (6), находим C0 = 46 нФ.
Развитие средств управления выдвигает на передний план задачу цифровой реализации режекторного фильтра. Для этого набором математических выражений надо описать его работу в составе системы управления, которая, в данном случае, является непрерывной, поскольку не содержит нелинейных элементов. В целом, синтез непрерывных систем управления основывается на их описании обыкновенными дифференциальными уравнениями в форме Коши, где, в общем случае, для многомерного элемента каждая входная переменная связана с каждой выходной переменной. Если взаимосвязи по всем каналам линейны или линеаризованы, то в общем случае многомерный элемент можно описать системой неоднородных дифференциальных уравнений. Систему можно записать более компактно в виде одного векторного дифференциального уравнения. Векторное дифференциальное уравнение в форме Коши, отражающее динамические свойства многомерного линейного объекта, является уравнением состояния и используется в качестве математической модели при моделировании методами пространств состояний.
Синтезировать систему можно различными методами, которые делят на две группы: методы численного интегрирования дифференциальных уравнений и матричные методы, основанные на расчете переходной матрицы состояния. Благодаря относительной простоте применения и широкому распространению в литературе чаще используют методы численного интегрирования. При этом, в данном случае, вместо методов численного интегрирования высокого порядка, например метода Рунге-Кутта четвертого порядка или Кутта-Мерсона четвертого порядка, целесообразно применить экономичный, как в плане используемой памяти, так в плане времени выполнения, метод Эйлера первого порядка.
Базовая операция интегрирования, реализованная по методу Эйлера первого порядка, будет выглядеть следующим образом:
Структурная схема, соответствующая данной операции, представлена на Рисунке 11.
| Рисунок 11. | Структурная схема интегратора по методу Эйлера. |
Как видно из формулы (7), при выполнении операции интегрирования основным фактором, влияющим на выходную величину, является шаг дискретизации dt, который в цифровых системах можно определить, считывая один раз за цикл значение таймера. Величина с индексом i определяет сигнал на текущем шаге интегрирования, а с индексом i–1 – на предыдущем.
Поскольку в формуле (1) W(p) представляет собой отношение выходного сигнала Y(p) к входному X(p), то с учетом замены T = ω0(1/Q) получим:
Произведя несложные математические преобразования, выразим Y(p):
В соответствии с уравнением (9) составим структурную схему (Рисунок 12).
| Рисунок 12. | Структурная схема режекторного фильтра. |
C учетом формулы (7) и Рисунка 11 схема приобретает вид, показанный на Рисунке 13.
| Рисунок 13. | Структурная схема режекторного фильтра, расписанная по методу Эйлера. |
На основе полученной структурной схемы составим систему численных выражений, которая будет описывать режекторный фильтр в цифровом виде:
Как видим, входящие в систему (10) выражения не содержат операций деления, требующих достаточно больших вычислительных ресурсов, поэтому фильтр вполне может быть реализован на маломощных микроконтроллерах.
Данный алгоритм наиболее хорошо подходит для систем, где относительная длительность установившегося процесса существенно больше времени переходных процессов, например, в электроприводах шахтных подъемных установок или конвейеров. В системах с часто меняющимся заданием, например, в исполнительных механизмах промышленных роботов, этот алгоритм будет менее эффективен.
| Рисунок 14. | Алгоритм адаптивной фильтрации. |
В приведенном алгоритме выполняется проверка прохода через 0 величины Us, представлящей собой выходной сигнал сумматора, описывающий разность входной величины и сигнала обратной связи. При первом проходе устанавливается флаг fl, а также обнуляется (clk=0) и запускается (clkON=1) таймер clk. При следующем проходе значение clk сравнивается с некоторым диапазоном фильтруемой частоты. Это необходимо, в первую очередь, из-за того, что сигнал Us в установившемся режиме может несколько отличаться от нулевого значения. В данном случае верхняя и нижняя границы диапазона равны 15 и 25 мс, что соответствует частотам 66.67 и 40 Гц. При попадании в этот диапазон сбрасывается fl, отключается таймер и устанавливается флаг включения фильтрации flFiltr, который активирует в основном цикле программы алгоритм режекторного фильтра. Таким образом, не требующий особых вычислительных средств алгоритм может следить за наличием помех на входе системы и лишь при необходимости подключать фильтрацию. Отключение фильтрации можно производить различными способами. Если за системой постоянно следит дежурный персонал, то отключение можно инициировать командой пользователя. В некоторых случаях предпочтительнее использовать таймер, отсчитывающий время, в течение которого производится фильтрация. По истечении этого времени при наличии помехи алгоритм вновь подключит фильтрацию. При определенной интенсивности таких подключений система может счесть помеху постоянной и совсем не отключать фильтрацию.
В работе были показаны методы и способы ликвидации низкочастотных помех в системах автоматического управления электроприводами и исполнительными механизмами. И хотя с подобными помехами на практике приходится сталкиваться не так часто, как с высокочастотными, они также серьезно влияют на работоспособность системы.
Читайте также: