
Пылесос arduino uno motor shield l293d gps bluetooth android своими руками
Обновлено: 05.07.2024
Драйвер двигателя в проектах ардуино
Для чего нужен драйвер двигателя?
Как известно, плата ардуино имеет существенные ограничения по силе тока присоединенной к ней нагрузки. Для платы это 800 mA, а для каждого отдельного вывода – и того меньше, 40mA. Мы не можем подключить напрямую к Arduino Uno, Mega или Nano даже самый маленький двигатель постоянного тока. Любой из этих двигателей в момент запуска или остановки создаст пиковые броски тока, превышающие этот предел.
Как же тогда подключить двигатель к ардуино? Есть несколько вариантов действий:
Использовать реле. Мы включаем двигатель в отдельную электрическую сеть, никак не связанную с платой Arduino. Реле по команде ардуино замыкает или размыкает контакты, тем самым включает или выключает ток. Соответственно, двигатель включается или выключается. Главным преимуществом этой схемы является ее простота и возможность использовать Главным недостатком данной схемы является то, что мы не можем управлять скоростью и направлением вращения.
Использовать силовой транзистор. В данном случае мы можем управлять током, проходящим через двигатель, а значит, можем управлять скоростью вращения шпинделя. Но для смены направления вращения этот способ не подойдет.
Использовать специальную схему подключения, называемую H-мостом, с помощью которой мы можем изменять направление движения шпинделя двигателя. Сегодня можно без проблем найти как микросхемы, содержащие два или больше H-моста, так и отдельные модули и платы расширения, построенные на этих микросхемах.
В этой статье мы рассмотрим последний, третий вариант, как наиболее гибкий и удобный для создания первых роботов на ардуино.
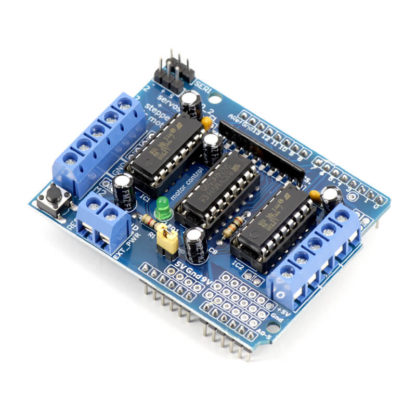
Микросхема или плата расширения Motor Shield
Motor Shield – плата расширения для Ардуино, которая обеспечивает работу двигателей постоянного тока и шаговых двигателей. Самыми популярными платами Motor Shield являются схемы на базе чипов L298N и L293D, которые могут управлять несколькими двигателями. На плате установлен комплект сквозных колодок Ардуино Rev3, позволяющие устанавливать другие платы расширения. Также на плате имеется возможность выбора источника напряжения – Motor Shield может питаться как от Ардуино, так и от внешнего источника. На плате имеется светодиод, который показывает, работает ли устройство. Все это делает использование драйвера очень простым и надежным – не нужно самим изобретать велосипеды и решать уже кем-то решенные проблемы. В этой статье мы будем говорить именно о шилдах.
Принцип действия H-моста
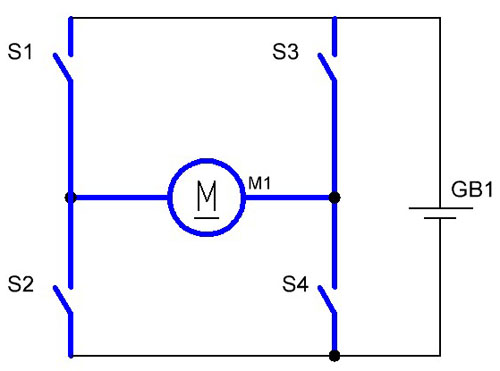
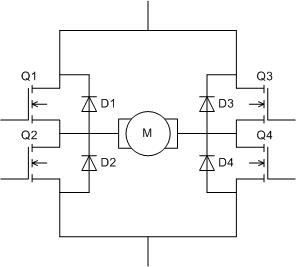
Принцип работы драйвера двигателя основан на принципе работы H-моста. H-мост является электронной схемой, которая состоит из четырех ключей с нагрузкой. Название моста появилось из напоминающей букву H конфигурации схемы.
Схема моста изображена на рисунке. Q1…Q4 0 полевые, биполярные или IGBT транзисторы. Последние используются в высоковольтных сетях. Биполярные транзисторы практически не используются, они могут присутствовать в маломощных схемах. Для больших токов берут полевые транзисторы с изолированным затвором. Ключи не должны быть замкнуты вместе одновременно, чтобы не произошло короткого замыкания источника. Диоды D1…D4 ограничительные, обычно используются диоды Шоттки.
С помощью изменения состояния ключей на H-мосте можно регулировать направление движения и тормозить моторы. В таблице приведены основные состояния и соответствующие им комбинации на пинах.
| Q1 | Q2 | Q3 | Q4 | Состояние |
| 1 | 0 | 0 | 1 | Поворот мотора вправо |
| 0 | 1 | 1 | 0 | Поворот мотора влево |
| 0 | 0 | 0 | 0 | Свободное вращение |
| 0 | 1 | 0 | 1 | Торможение |
| 1 | 0 | 1 | 0 | Торможение |
| 1 | 1 | 0 | 0 | Короткое замыкание |
| 0 | 0 | 1 | 1 | Короткое замыкание |
Установка
Чтобы начать использовать данную плату расширения, необходимо сначала настроить несколько выводов, используемых платой. Этот код настройки обычно помещается в функцию setup(). Чтобы использовать все функциональные возможности данной платы расширения, выводы 8, 9, 12 и 13 платы Arduino необходимо настроить, как выходные выводы. Это можно выполнить с помощью следующего кода:
pinMode(8,OUTPUT); // Настройка вывода тормоза канала A pinMode(9,OUTPUT); // Настройка вывода тормоза канала B pinMode(12,OUTPUT); // Настройка вывода направления канала A pinMode(13,OUTPUT); // Настройка вывода направления канала B
Драйвер двигателя L298N
Модуль используется для управления шаговыми двигателями с напряжением от 5 до 35 В. При помощи одной платы L298N можно управлять сразу двумя двигателями. Наибольшая нагрузка, которую обеспечивает микросхема, достигает 2 А на каждый двигатель. Если подключить двигатели параллельно, это значение можно увеличить до 4 А.
Плата выглядит следующим образом:

Распиновка микросхемы L298N:
- Vcc – используется для подключения внешнего питания;
- 5В;
- Земля GND;
- IN1, IN2, IN3, IN4 – используется для плавного управления скоростью вращения мотора;
- OUT1, OUT2 – используется для выхода с первого двигателя;
- OUT3, OUT4 – используется для выхода со второго двигателя;
- S1 – переключает питание схемы: от внешнего источника или от внутреннего преобразователя;
- ENABLE A, B – требуются для раздельного управления каналами. Используются в двух режимах – активный, при котором каналами управляет микроконтроллер и имеется возможность изменения скорости вращения, и пассивный, в котором невозможно управлять скоростью двигателей (установлено максимальное значение).

При подключении двух двигателей, нужно проверить, чтобы у них была одинаковая полярность. Если полярность разная, то при задании направления движения они будут вращаться в противоположные стороны.




Пример программного кода
// Подключаем двигатели к клеммникам M1, M2, M3, M4 AF_DCMotor motor1(1); AF_DCMotor motor2(2); AF_DCMotor motor3(3); AF_DCMotor motor4(4);
Драйвер двигателя L293D
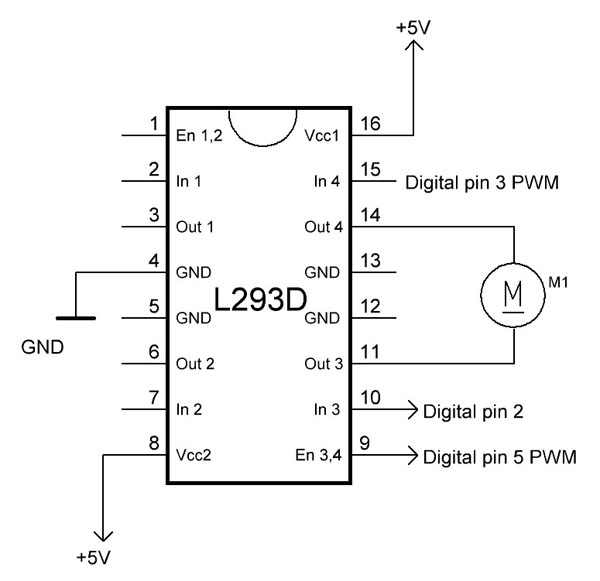
L293D – является самой простой микросхемой для работы с двигателями. L293D обладает двумя H-моста, которые позволяют управлять двумя двигателями. Рабочее напряжение микросхемы – 36 В, рабочий ток достигает 600 мА. На двигатель L293D может подавать максимальный ток в 1,2 А.
В схеме имеется 16 выходов. Распиновка:
- +V – питание на 5 В;
- +Vmotor – напряжение питания для мотором до 36 В;
- 0V – земля;
- En1, En2 –включают и выключают H-мосты;
- In1, In2 – управляют первым H-мостом;
- Out1, Out2 – подключение первого H-моста;
- In3, In4 – управляют вторым H-мостом;
- Out3, Out4 – подключение второго H-моста.

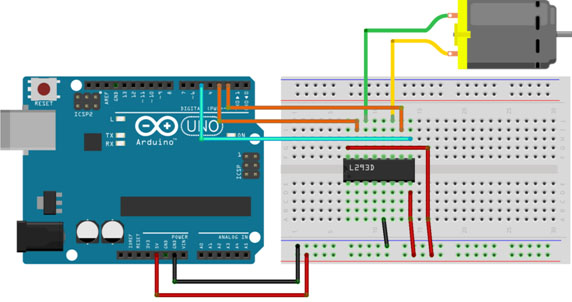
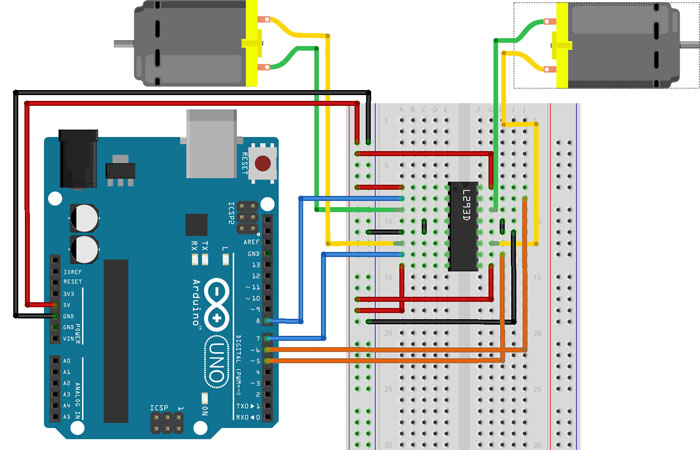
Для подключения к микроконтроллеру Arduino Uno нужно соединить выходы In1 на L293D и 7 пин на Ардуино, In2 – 8, In3 – 2, In4 – 3, En1 – 6, En2 – 5, V – 5V, Vmotor – 5 V, 0V – GND. Пример подключения одного двигателя к Ардуино показан на рисунке.


Использование сервомашинок
Хоббийные сервомашинки являются самым простым способом начать разбираться с управлением двигателями. Они имеют трехконтактый разъем, включающий сигнальную линию, питание +5 В и землю. Motor Shield просто выводит 16-битные ШИМ-выводы Arduino на отдельные разъемы для подключения сервомашинок. Нужно учитывать, что сервомоторы могут потреблять много энергии, поэтому, как уже отмечалось, возможно потребуется подведение отдельной линии питания 5 В.

Подключение сервомашинки к Motor Shield
Преимуществом использования встроенных ШИМ-выводов Arduino является то, что это достаточно точно и работает в фоновом режиме. Можно использовать встроенную бибиотеку Servo .
Драйвер двигателя на микросхеме HG7881
HG7881 – двухканальный драйвер, к которому можно подключить 2 двигателя или четырехпроводной двухфазный шаговый двигатель. Устройство часто используется из-за своей невысокой стоимости. Драйвер используется только для изменения направления вращения, менять скорость он не может.
Плата содержит 2 схемы L9110S, работающие как H-мост.
Характеристики драйвера HG7881:
- 4-контактное подключение;
- Питание для двигателей от 2,5 В до 12 В;
- Потребляемый ток менее 800 мА;
- Малые габариты, небольшой вес.
Распиновка:
- GND – земля;
- Vcc – напряжение питания 2,5В – 12В;
- A-IA – вход A(IA) для двигателя A;
- A-IB – вход B (IB) для двигателя A;
- B-IA – вход A(IA) для двигателя B;
- B-IB – вход B (IB) для двигателя B.
В зависимости от поданного сигнала на выходах IA и IB будет разное состояние для двигателей. Возможные варианты для одного из моторов приведены в таблице.
| IA | IB | Состояние мотора |
| 0 | 0 | Остановка |
| 1 | 0 | Двигается вперед |
| 0 | 1 | Двигается назад |
| 1 | 1 | Отключение |
Подключение одного двигателя к Ардуино изображено на рисунке.

Сравнение модулей
Модуль L293D подает максимальный ток в 1,2А, в то время как на L298N можно добиться максимального тока в 4 А. Также L293D обладает меньшим КПД и быстро греется во время работы. При этом L293D является самой распространенной платой и стоит недорого. Плата HG7881 отличается от L293D и L298N тем, что с ее помощью можно управлять только направлением вращения, скорость менять она не может. HG7881 – самый дешевый и самый малогабаритный модуль.
Библиотека AFMotor
Для того, чтобы использовать Motor Shield в своих проектах можно воспользоваться библиотекой AFMotor. Для этого:
- Скачиваем библиотеку AFMotor с GitHub.
- Распаковываем полученный ZIP-архив.
- Переименовываем распакованную папку в AFMotor. Внутри папки должы быть файлы AFMotor.cpp и AFMotor.h и некоторые другие.
- Перемещаем эту папку в вашу папку с библиотеками Arduino. На Windows папка с библиотеками находится в Мои документы/Arduino/libraries (если вы не меняли пути по умолчанию в Arduino IDE). На Mac OS этот путь по-умолчанию Документы/arduino/libraries . Если это первая библиотека, которую вы устанавливаете, то необходимо будет создать в папке arduino папку libraries . Обратите внимание, что название папки пишется в нижнем регистре.
- Перезапустите Arduino IDE. Должно появиться подменю Файл → Примеры → AFMotor

Подключение L298N к Arduino
Как уже упоминалось, в первую очередь нужно проверить полярность подключенных двигателей. Двигатели, вращающиеся в различных направлениях, неудобно программировать.
Нужно присоединить источник питания. + подключается к пину 4 на плате L298N, минус (GND) – к 5 пину. Затем нужно соединить выходы с L298N и пины на Ардуино, причем некоторые из них должны поддерживать ШИМ-модуляцию. На плате Ардуино они обозначены ~. Выходы с L298N IN1, IN2, IN3 и IN4 подключить к D7, D6, D5 и D4 на Ардуино соответственно. Подключение всех остальных контактов представлено на схеме.

Направление вращения задается с помощью сигналов HIGH и LOW на каждый канал. Двигатели начнут вращаться, только когда на 7 пине для первого мотора и на 12 пине для второго на L298N будет сигнал HIGH. Подача LOW останавливает вращение. Чтобы управлять скоростью, используются ШИМ-сигналы.
Для управления шаговым двигателем в Arduino IDE существует стандартная библиотека Stepper library. Чтобы проверить работоспособность собранной схемы, можно загрузить тестовый пример stepper_oneRevolution. При правильной сборке вал двигателя начнет вращаться.
При работе с моторами Ардуино может периодически перезагружаться. Это возникает из-за того, что двигателям требуются большие токи при старте и в момент торможения. Для решения этой проблемы в плату встроены конденсаторы, диоды и другие схемы. Также для этих целей на шидле имеется раздельное питание.
Собираем Arduino машинку на Motor Shield L293D и ИК пульте

Пол года назад коме пришла идея изучать программирование микроконтроллеров. Почитал в интернете и понял, что самая простая среда разработки Arduino IDE. Посмотрел кто и что делает и решил сделать свою машинку на пульте управления. Почему именно на ИК пульте управления? Просто по всем отзывам и разработкам это самая простая и дешевая машинка.
При выборе комплектующих выбор пал на Arduino UNO и Motor Shield L293D.
Что мне понадобилось:
3. Два мотор редуктора и два колеса. 240 руб.
5. Источник питания. Я покупал power bank за 300 руб. или тут
Можно купить бокс под батарейки 50 руб.
6. провода для подключения мотор редуктора к шилду можно взять от мышки, USB- зарядки и пр., что у вас не работает и лежит без дела.
7. ПВХ панель. Обрезок картонки, фанерки и пр.
8. мебельное колесико в магазине стоит около 50 руб.
9. винтики болтик можно купить руб за 40 в строительном магазине.
И того машинку на Motor Shield L293D и ИК пульте можно собрать за 670 руб.
Когда пришли все комплектующие я понял, что паять все таки нужно будет. И на первом этапе мне показалось что Motor Shield не предназначен для сборки машинок на ИК пульте управления.
Прочитал я статьи про Motor Shield и понял, что стандартную библиотеку использовать в данном случае не получиться. Разобрав электрическую схему я понял как можно подключить I R приемник и двигателя. Написал небольшой скетч. Сделал основу из панели ПВХ. Процесс сборки смотрите в видео. Я повторил первую версию машинки в точности как была сделана.
После пары переделок скетча, машинка поехала. Большой минус был в том, что пока не нажмешь кнопку стоп машинка продолжает движения. Это доставляло массу неудобств особенно, когда машинка заезжала под диван или кровать. Сигнал от пульта не попадал на IR приемник и машинку приходилось вручную доставать.
В новый год у меня сломался power bank. Я заказал запчасти чтобы его отремонтировать. Dc-Dc преобразователь и плата контроля заряда шли больше 2 месяцев. И поэтому машинка у меня стояла, пылилась.
После того как я восстановил Power bank и переписал код, исправив недостаток предыдущей версии. Машинка стала ездить и поворачивать пока нажата кнопка на пульте. Пульт можно отвернуть в противоположную сторону, при этом машинка продолжает движение.
После того как отпускаем кнопку машинка останавливается. Стало намного удобнее.
По просьбе подписчиков выкладываю скетч. Снять отдельно видео пока не получается. Если возникнут вопросы пишите в группу в контакте: Arduino Portal-PK.
Пример 35. Плата расширения для двигателей на L293D
Примеры
СБОРНИК ПРИМЕРОВ


ПРИМЕРЫ
Двигатели постоянного тока потребляет очень большой ток. И для того, чтобы управлять ими требуются специальные силовые транзисторные ключи. Существуют специальные микросхемы, которые заточены под эту задачу, например, L293D. А для плат Arduino существует уже готовое решение — плата расширения для двигателей на L293D.
Мотор-шилды на основе микросхем L293D и L298N являются самыми популярными драйверами для управления моторами постоянного тока. Данная плата расширения позволяет подключить 4 DC-мотора (либо 2 шаговых двигателя) и два серводвигателя.

К минусам данного шилда можно отнести то, что он задействует практически все цифровые пины.
Выводы, отвечающие за скорость вращения двигателей:
- Цифровой вывод 11 – DC Мотор №1 / Шаговый №1
- Цифровой вывод 3 – DC Мотор №2 / Шаговый №1
- Цифровой вывод 5 – DC Мотор №3 / Шаговый №2
- Цифровой вывод 6 – DC Мотор №4 / Шаговый №2
Выводы, отвечающие за выбор направления вращения двигателей:
Выводы для управления сервоприводами (выведены на штырьки на краю платы):
- Цифровой вывод 9 – Сервопривод №1
- Цифровой вывод 10 – Сервопривод №2
В итоге незадействованными цифровыми выводами остаются только пины 2, 13 и пины интерфейса UART – 0, 1. Однако есть выход из данной ситуации. У нас остались незадействованные аналоговые входы A0 – A6, их можно использовать как цифровые. В коде они будут записываться как цифровые с 14 по 19.
Описание:
В данном примере с помощью мотор-шилда на L293D будем одновременно управлять 4 двигателями постоянного тока (меняя скорость и направление). Для подключения шилда достаточно вставить его в плату Arduino Uno. Для работы с данным шилдом необходимо скачать библиотеку AFMotor.
Управление DC-моторчиками с помощью L293D
Я не буду в дальнейшем описывать мелкие детали. О них можно узнать в предыдущих публикациях. Попытаюсь работать более-менее системно, проиллюстрировав каждый шаг (если получится) практическим примером.
1. Н-мост, упрощённая схема:
Можно, конечно, собрать Н-мост на дискретных элементах (транзисторах) и показать, что он тоже работает. Но создание робота на основе Ардуино – не тот случай, когда требуется столь самоотверженный поступок. Мосты давно уже наведены! Поэтому более извращаться я не намерен.
2. L293D представляет собой двойной Н-мос т, т.е. служит для управления 2-я моторчиками. Не только, конечно, можно 3-мя и 4-мя, но… читайте DataSheet!
Задействую сначала половину микросхемы для управления одним моторчиком:
Соединения:
Скетч №1:
Каждые 5 с моторчик меняет направление вращения. Скорость постоянная.
Скетч №2:
Мотор вращается на пониженных оборотах, затем – на полных, затем – в другую сторону на пониженных, затем на полных и т.д. Интервал – 2 с.
У меня данная схема нормально не заработала. Даже для двух маленьких DC-моторчиков мощности стабилизатора Arduinoне хватило. Показалось также (касание пальцем), что L293D немного нагрелась!
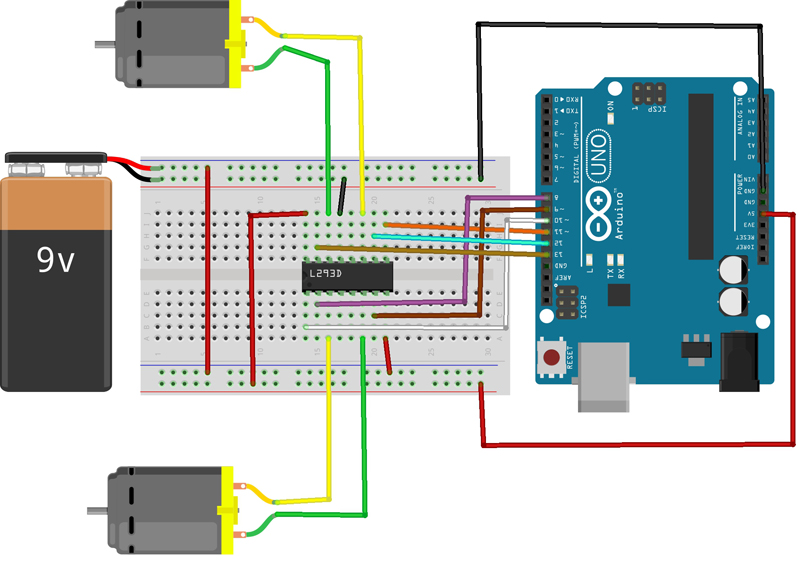
Пришлось снова использовать отдельный источник питания для моторчиков:
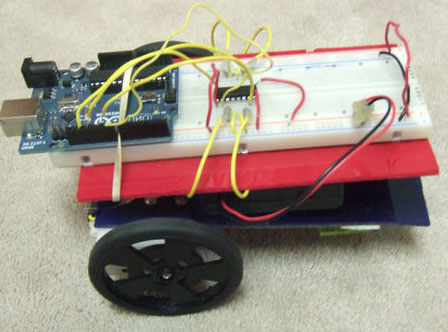
Дальнейшие эксперименты с моторчиками, приклеенными скотчем к столу, считаем нецелесообразными. Пора переходить к более реальному прототипу. Совершенно не хочется делать нечто совершенно неэстетичное типа:
Даже если ОНО и ездит!

На AliExpress ушёл заказ:
Рассмотрим l293d motor shield — подключение к плате Ардуино, библиотека AFMotor. Управление через control shield сервоприводами и моторами постоянного тока.
Сегодня мы разберем весьма полезное расширение для платы Arduino UNO — Motor Control Shield L293D, рассмотрим схему подключения к данному шилду сервомоторов, шаговых двигателей и моторов постоянного тока. Также вы можете ознакомиться с командами, используемых в библиотеке AFMotor.h, и попробовать различные скетчи для управления шаговыми двигателями и моторами постоянного тока на Ардуино.
Видео. Машинка на Motor Shield и Bluethoth
Motor Shield L293D: схема, характеристики
Микроконтроллер Ардуино позволяет любому начинающему радиолюбителю изготавливать сложные автоматизированные устройства и проекты. Использование Motor Shield может стать полезным дополнением во в многих проектах на Arduino, так как позволяет подключить сразу 2 сервопривода, 2 шаговых двигателя и до 4 двигателей постоянного тока (с реверсом направления вращения ротора).
Схема и подключение Motor Control Shield for Arduino
Характеристики Мотор Шилд L293D
— для работы нужна библиотека AFMotor.h (скачать библотеку);
— возможность подключения 2-х сервоприводов на 5 Вольт;
— возможность подключения 2-х шаговых двигателей от 6 до 12 Вольт;
— подключение до 4-х моторов с возможностью реверса направления вращения;
— контакты для подключения внешнего питания для двигателей;
— Motor Shield for Arduino совместим с платами Uno и Mega.
При подключении серводвигателей и моторов к Ардуино используются различные порты, к которым нельзя подключать другую периферию. Так, для серво используются цифровые порты 9 и 10, для шаговых двигателей и моторов используются порты с 3 по 8 и 12. Если вы желаете еще что-то подключить, то используйте 0 и 1 порт, 2 и 13, а также аналоговые входы (порты A0-A5 можно использовать как цифровые выходы).
Arduino Motor Shield L293D подключение
Для занятия нам понадобятся следующие детали:
К Ардуино шилд подключается очень просто — он устанавливается на плату UNO прямо сверху. Обратите внимание, что без подключения внешнего источника питания к Motor Shield, логика и двигатели будут работать от 5 Вольт, что не всегда бывает достаточно. Поэтому скорость вращения моторов постоянного тока при подключении платы Ардуино от компьютера и блока питания будет значительно отличаться.
Мотор Шилд Ардуино подключение
Обратите внимание, что даже если вы задали одинаковую скорость вращения в скетче, моторы в реальности могут вращаться с разной скоростью — на это оказывает влияние скорость самого двигателя, качество изготовления редуктора и колес. После подключения двигателей, как на схеме выше, загрузите следующий скетч (скачать библиотеку AFMotor и скетч можно здесь) для тестирования работы шилда:
Пояснения к коду:
Подключение серво и шаговых двигателей
Для управления сервоприводами используется стандартная библиотека Servo.h, сами сервоприводы подключаются к цифровым выходам 9 и 10 через штырьки на краю платы. К шилду можно подключить только два сервопривода и два шаговых двигателя. Первый шаговый двигатель подключается к клеммам M1 и M2, а второй к клеммам M3 и M4. Схема подключения двигателей к Motor Shield L293D изображена далее.
Подключение шаговых двигателей к Motor Shield L293D
После подключения Stepper Motor к шилду загрузите в плату следующий скетч:
Рассмотрим l293d motor shield — подключение к плате Ардуино, библиотека AFMotor. Управление через control shield сервоприводами и моторами постоянного тока.
Сегодня мы разберем весьма полезное расширение для платы Arduino UNO — Motor Control Shield L293D, рассмотрим схему подключения к данному шилду сервомоторов, шаговых двигателей и моторов постоянного тока. Также вы можете ознакомиться с командами, используемых в библиотеке AFMotor.h, и попробовать различные скетчи для управления шаговыми двигателями и моторами постоянного тока на Ардуино.
Видео. Машинка на Motor Shield и Bluethoth
Motor Shield L293D: схема, характеристики
Микроконтроллер Ардуино позволяет любому начинающему радиолюбителю изготавливать сложные автоматизированные устройства и проекты. Использование Motor Shield может стать полезным дополнением во в многих проектах на Arduino, так как позволяет подключить сразу 2 сервопривода, 2 шаговых двигателя и до 4 двигателей постоянного тока (с реверсом направления вращения ротора).
Схема и подключение Motor Control Shield for Arduino
Характеристики Мотор Шилд L293D
— для работы нужна библиотека AFMotor.h (скачать библотеку);
— возможность подключения 2-х сервоприводов на 5 Вольт;
— возможность подключения 2-х шаговых двигателей от 6 до 12 Вольт;
— подключение до 4-х моторов с возможностью реверса направления вращения;
— контакты для подключения внешнего питания для двигателей;
— Motor Shield for Arduino совместим с платами Uno и Mega.
При подключении серводвигателей и моторов к Ардуино используются различные порты, к которым нельзя подключать другую периферию. Так, для серво используются цифровые порты 9 и 10, для шаговых двигателей и моторов используются порты с 3 по 8 и 12. Если вы желаете еще что-то подключить, то используйте 0 и 1 порт, 2 и 13, а также аналоговые входы (порты A0-A5 можно использовать как цифровые выходы).
Arduino Motor Shield L293D подключение
Для занятия нам понадобятся следующие детали:
К Ардуино шилд подключается очень просто — он устанавливается на плату UNO прямо сверху. Обратите внимание, что без подключения внешнего источника питания к Motor Shield, логика и двигатели будут работать от 5 Вольт, что не всегда бывает достаточно. Поэтому скорость вращения моторов постоянного тока при подключении платы Ардуино от компьютера и блока питания будет значительно отличаться.
Мотор Шилд Ардуино подключение
Обратите внимание, что даже если вы задали одинаковую скорость вращения в скетче, моторы в реальности могут вращаться с разной скоростью — на это оказывает влияние скорость самого двигателя, качество изготовления редуктора и колес. После подключения двигателей, как на схеме выше, загрузите следующий скетч (скачать библиотеку AFMotor и скетч можно здесь) для тестирования работы шилда:
Пояснения к коду:
Подключение серво и шаговых двигателей
Для управления сервоприводами используется стандартная библиотека Servo.h, сами сервоприводы подключаются к цифровым выходам 9 и 10 через штырьки на краю платы. К шилду можно подключить только два сервопривода и два шаговых двигателя. Первый шаговый двигатель подключается к клеммам M1 и M2, а второй к клеммам M3 и M4. Схема подключения двигателей к Motor Shield L293D изображена далее.
Подключение шаговых двигателей к Motor Shield L293D
После подключения Stepper Motor к шилду загрузите в плату следующий скетч:
Драйвер двигателя выполняет крайне важную роль в проектах ардуино, использующих двигатели постоянного тока или шаговые двигатели. C помощью микросхемы драйвера или готового шилда motor shield можно создавать мобильных роботов, автономные автомобили на ардуино и другие устройства с механическими модулями. В этой статье мы рассмотрим подключение к ардуино популярных драйверов двигателей на базе микросхем L298N и L293D.
Драйвер двигателя в проектах ардуино
Для чего нужен драйвер двигателя?
Как известно, плата ардуино имеет существенные ограничения по силе тока присоединенной к ней нагрузки. Для платы это 800 mA, а для каждого отдельного вывода – и того меньше, 40mA. Мы не можем подключить напрямую к Arduino Uno, Mega или Nano даже самый маленький двигатель постоянного тока. Любой из этих двигателей в момент запуска или остановки создаст пиковые броски тока, превышающие этот предел.
Как же тогда подключить двигатель к ардуино? Есть несколько вариантов действий:
Использовать реле. Мы включаем двигатель в отдельную электрическую сеть, никак не связанную с платой Arduino. Реле по команде ардуино замыкает или размыкает контакты, тем самым включает или выключает ток. Соответственно, двигатель включается или выключается. Главным преимуществом этой схемы является ее простота и возможность использовать Главным недостатком данной схемы является то, что мы не можем управлять скоростью и направлением вращения.
Использовать силовой транзистор. В данном случае мы можем управлять током, проходящим через двигатель, а значит, можем управлять скоростью вращения шпинделя. Но для смены направления вращения этот способ не подойдет.
Использовать специальную схему подключения, называемую H-мостом, с помощью которой мы можем изменять направление движения шпинделя двигателя. Сегодня можно без проблем найти как микросхемы, содержащие два или больше H-моста, так и отдельные модули и платы расширения, построенные на этих микросхемах.
В этой статье мы рассмотрим последний, третий вариант, как наиболее гибкий и удобный для создания первых роботов на ардуино.
Микросхема или плата расширения Motor Shield
Motor Shield – плата расширения для Ардуино, которая обеспечивает работу двигателей постоянного тока и шаговых двигателей. Самыми популярными платами Motor Shield являются схемы на базе чипов L298N и L293D, которые могут управлять несколькими двигателями. На плате установлен комплект сквозных колодок Ардуино Rev3, позволяющие устанавливать другие платы расширения. Также на плате имеется возможность выбора источника напряжения – Motor Shield может питаться как от Ардуино, так и от внешнего источника. На плате имеется светодиод, который показывает, работает ли устройство. Все это делает использование драйвера очень простым и надежным – не нужно самим изобретать велосипеды и решать уже кем-то решенные проблемы. В этой статье мы будем говорить именно о шилдах.
Принцип действия H-моста
Принцип работы драйвера двигателя основан на принципе работы H-моста. H-мост является электронной схемой, которая состоит из четырех ключей с нагрузкой. Название моста появилось из напоминающей букву H конфигурации схемы.
Схема моста изображена на рисунке. Q1…Q4 0 полевые, биполярные или IGBT транзисторы. Последние используются в высоковольтных сетях. Биполярные транзисторы практически не используются, они могут присутствовать в маломощных схемах. Для больших токов берут полевые транзисторы с изолированным затвором. Ключи не должны быть замкнуты вместе одновременно, чтобы не произошло короткого замыкания источника. Диоды D1…D4 ограничительные, обычно используются диоды Шоттки.
С помощью изменения состояния ключей на H-мосте можно регулировать направление движения и тормозить моторы. В таблице приведены основные состояния и соответствующие им комбинации на пинах.
| Q1 | Q2 | Q3 | Q4 | Состояние |
| 1 | 1 | Поворот мотора вправо | ||
| 1 | 1 | Поворот мотора влево | ||
| Свободное вращение | ||||
| 1 | 1 | Торможение | ||
| 1 | 1 | Торможение | ||
| 1 | 1 | Короткое замыкание | ||
| 1 | 1 | Короткое замыкание |
Драйвер двигателя L298N
Модуль используется для управления шаговыми двигателями с напряжением от 5 до 35 В. При помощи одной платы L298N можно управлять сразу двумя двигателями. Наибольшая нагрузка, которую обеспечивает микросхема, достигает 2 А на каждый двигатель. Если подключить двигатели параллельно, это значение можно увеличить до 4 А.
Плата выглядит следующим образом:

Распиновка микросхемы L298N:
- Vcc – используется для подключения внешнего питания;
- 5В;
- Земля GND;
- IN1, IN2, IN3, IN4 – используется для плавного управления скоростью вращения мотора;
- OUT1, OUT2 – используется для выхода с первого двигателя;
- OUT3, OUT4 – используется для выхода со второго двигателя;
- S1 – переключает питание схемы: от внешнего источника или от внутреннего преобразователя;
- ENABLE A, B – требуются для раздельного управления каналами. Используются в двух режимах – активный, при котором каналами управляет микроконтроллер и имеется возможность изменения скорости вращения, и пассивный, в котором невозможно управлять скоростью двигателей (установлено максимальное значение).

При подключении двух двигателей, нужно проверить, чтобы у них была одинаковая полярность. Если полярность разная, то при задании направления движения они будут вращаться в противоположные стороны.
Драйвер двигателя L293D
L293D – является самой простой микросхемой для работы с двигателями. L293D обладает двумя H-моста, которые позволяют управлять двумя двигателями. Рабочее напряжение микросхемы – 36 В, рабочий ток достигает 600 мА. На двигатель L293D может подавать максимальный ток в 1,2 А.
В схеме имеется 16 выходов. Распиновка:
- +V – питание на 5 В;
- +Vmotor – напряжение питания для мотором до 36 В;
- 0V – земля;
- En1, En2 –включают и выключают H-мосты;
- In1, In2 – управляют первым H-мостом;
- Out1, Out2 – подключение первого H-моста;
- In3, In4 – управляют вторым H-мостом;
- Out3, Out4 – подключение второго H-моста.
Для подключения к микроконтроллеру Arduino Uno нужно соединить выходы In1 на L293D и 7 пин на Ардуино, In2 – 8, In3 – 2, In4 – 3, En1 – 6, En2 – 5, V – 5V, Vmotor – 5 V, 0V – GND. Пример подключения одного двигателя к Ардуино показан на рисунке.

Драйвер двигателя на микросхеме HG7881
HG7881 – двухканальный драйвер, к которому можно подключить 2 двигателя или четырехпроводной двухфазный шаговый двигатель. Устройство часто используется из-за своей невысокой стоимости. Драйвер используется только для изменения направления вращения, менять скорость он не может.

Плата содержит 2 схемы L9110S, работающие как H-мост.
Характеристики драйвера HG7881:
- 4-контактное подключение;
- Питание для двигателей от 2,5 В до 12 В;
- Потребляемый ток менее 800 мА;
- Малые габариты, небольшой вес.
Распиновка:
- GND – земля;
- Vcc – напряжение питания 2,5В – 12В;
- A-IA – вход A(IA) для двигателя A;
- A-IB – вход B (IB) для двигателя A;
- B-IA – вход A(IA) для двигателя B;
- B-IB – вход B (IB) для двигателя B.
В зависимости от поданного сигнала на выходах IA и IB будет разное состояние для двигателей. Возможные варианты для одного из моторов приведены в таблице.
| IA | IB | Состояние мотора |
| Остановка | ||
| 1 | Двигается вперед | |
| 1 | Двигается назад | |
| 1 | 1 | Отключение |
Подключение одного двигателя к Ардуино изображено на рисунке.
Сравнение модулей
Модуль L293D подает максимальный ток в 1,2А, в то время как на L298N можно добиться максимального тока в 4 А. Также L293D обладает меньшим КПД и быстро греется во время работы. При этом L293D является самой распространенной платой и стоит недорого. Плата HG7881 отличается от L293D и L298N тем, что с ее помощью можно управлять только направлением вращения, скорость менять она не может. HG7881 – самый дешевый и самый малогабаритный модуль.
Подключение L298N к Arduino
Как уже упоминалось, в первую очередь нужно проверить полярность подключенных двигателей. Двигатели, вращающиеся в различных направлениях, неудобно программировать.
Нужно присоединить источник питания. + подключается к пину 4 на плате L298N, минус (GND) – к 5 пину. Затем нужно соединить выходы с L298N и пины на Ардуино, причем некоторые из них должны поддерживать ШИМ-модуляцию. На плате Ардуино они обозначены
. Выходы с L298N IN1, IN2, IN3 и IN4 подключить к D7, D6, D5 и D4 на Ардуино соответственно. Подключение всех остальных контактов представлено на схеме.
Направление вращения задается с помощью сигналов HIGH и LOW на каждый канал. Двигатели начнут вращаться, только когда на 7 пине для первого мотора и на 12 пине для второго на L298N будет сигнал HIGH. Подача LOW останавливает вращение. Чтобы управлять скоростью, используются ШИМ-сигналы.
Для управления шаговым двигателем в Arduino IDE существует стандартная библиотека Stepper library. Чтобы проверить работоспособность собранной схемы, можно загрузить тестовый пример stepper_oneRevolution. При правильной сборке вал двигателя начнет вращаться.
При работе с моторами Ардуино может периодически перезагружаться. Это возникает из-за того, что двигателям требуются большие токи при старте и в момент торможения. Для решения этой проблемы в плату встроены конденсаторы, диоды и другие схемы. Также для этих целей на шидле имеется раздельное питание.
Читайте также: