
Плата разводки питания для квадрокоптера своими руками
Обновлено: 05.07.2024
Первые испытания летательного аппарата мультикоптера произошли еще в 1922-ом, но только во второй декаде XXI в. этот тип компоновки начал с внушительными темпами набирать популярность. В сравнении с другими радиоуправляемыми моделями квадрокоптеры пользуются большим спросом, вероятно, потому что имеют практическое назначение: как минимум, съемка красивых кадров с воздуха.
Следуя запросам потребителей, производители наводняют рынок обилием моделей различной конфигурации с разнообразными характеристиками. Многие покупатели предпочитают RTF (ready-to-fly, готовый к полетам) наборы, которые способны подниматься в воздух после несложной калибровки.
Но легкие пути нужны далеко не всем. Особое удовольствие можно извлечь, собрав квадрокоптер с ноля своими силами. Степень сложности варьируется от наборов со всеми необходимыми деталями для сборки до самостоятельно выбора каждого компонента, проверки их совместимости, сборки и настройки собственного БПЛА.
Собрать квадрокоптер имеет смысл и при наличии специфических сценариев применения, к которым заводские модели не приспособлены. Или собрать самому аппарат для обучения полетам, который не жалко будет разбить. Подробный чертеж для этого не понадобится, достаточно эскиза, на котором отмечены все элементы.

Базовые узлы и компоненты
Чтобы построенный аппарат был способен подниматься в воздух хотя бы в теории, а сборка квадрокоптера своими руками доставляла удовольствие, необходимо приобрести ряд соответствующих компонентов:
Инструментов для сборки понадобится немного – отвертка для сборки рамы, паяльник и, естественно, навыки работы с ним.

Чертежей квадрокоптеров в полном смысле этого слова не существует, да они и не нужны. Сборка из модулей исключает подобную потребность. С расходными материалами все немного сложней. Чтобы собрать квадрокоптер своими руками понадобятся:
Ничто не помешает внести необходимые правки и доработки в конструкцию в процессе сборки или летных испытаний. Может для поставленных целей лучше собрать октокоптер своими руками. При наличии внимательности и осторожности даже самые технически неграмотные любители аппаратов смогут построить летающего дрона. Более того, летные испытания в дальнейшем выявят все недостатки, которые устранятся. В результате должен получится идеальный персональный дрон. Главное – четко представлять сценарий его применения.
Процесс сборки
Существует масса вариантов компоновки и конструкции мультикоптеров, но наиболее распространены именно модели с четырьмя винтами. Поэтому сборка такого квадрокоптера послужит примером для поэтапного обзора процесса сборки. В процессе можно опираться на примерные чертежи квадрокоптеров из сети или составленные самим.
1: Строим раму
Независимо от габаритов или назначения каждый дрон должен иметь раму, каркас, несущую основу. Сборка готовых рам не должна вызывать сложностей ввиду того, что они снабжаются подробными инструкциями и всем необходимым крепежом.

А чтобы собрать раму самому, придется проявить конструкторские способности. Самостоятельно изготовленная рама квадрокоптера из металла, пластика, металлопластика или дерева должна быть достаточно прочной. К примеру, толщина деревянных частей каркаса, изготовленного своими руками, должна быть не менее 30 мм. Сборка своего квадрокоптера на недостаточно прочной раме – пустые усилия, потому что он будет часто ломаться.
2: Монтируем силовой агрегат и пропеллеры
Двигатели, их контроллеры и пропеллеры играют ключевую роль в скорости, маневренности и других характеристиках полета. Поэтому следует выбирать продукцию брендов, тесно работающих в сфере квадрокоптеростроения, а не кого-нибудь, кто оказался в этом сегменте рынка случайно.
Моторы для одного проекта должны быть одной модели от одного производителя.

После двигателей на плоскости их опор размещаются контроллеры оборотов и фиксируются стяжками. Соединение контроллеров с двигателями, также как с распределительной платой, осуществляется путем прямой пайки и коннекторов. При желании и бюджетных возможностях можно использовать контроллер 4-в-1, но тогда немного изменится схема компоновки квадрокоптера. В итоге получится почти готовый коптер, которому не хватает только полетного контроллера.
Полетный контроллер, как правило, монтируется в верхней части каркаса аппарата, над распределительной платой и отсеком для батареи. Компоновку допустимо изменять, но стоит помнить, что чем ниже центр тяжести, тем устойчивей аппарат.

Для минимизации влияния вибраций на работу полетного контроллера, его монтажная площадка часто крепится на резиновые проставки или используются более хитрые системы гашения вибраций. На этапе проектирования это хорошая возможность блеснуть инженерной смекалкой, не нанеся непоправимого вреда всей конструкции.
Только после того, как контроллер будет установлен, можно размещать оставшиеся узлы и модули: ресивер от пульта управления, GPS-датчик, магнитный компас, камеру, подвес и прочее.
И только размещать на корпусе, подключение допустимо только после первичной калибровки полетного контроллера.
Различные производители выпускают разные контроллеры, пульты управление и другие компоненты. Поэтому их калибровка – сложный и вариативный процесс, достойный отдельного рассмотрения.
Пропеллеры не рекомендуется устанавливать до полной калибровки аппарата. Исключительно во избежание травм.
4: Калибровка полетного контроллера и пульта
Собранное устройство должно быть полностью откалибровано, а на пульте следует установить управление. Только после этого можно будет подыматься в воздух, не опасаясь потерять плод своих трудов. Однако точное описание процесса калибровки зависит от типа используемого контроллера и аппаратуры, поэтому следует уточнять необходимые шаги, исходя из этих данных.

Только потратив 200-300 долларов на компоненты, несколько дней на сборку, настройку и калибровку, можно наконец отправляться в полет на собственноручно построенном квадрокоптере. Нельзя не отметить, что за те же деньги доступны вполне функциональные серийные модели. Но дело ведь не в этом.
Приведенная выше инструкция достаточно поверхностна, но она дает очертания того, с чем придется столкнуться, чтобы квадрокоптер собрать. Постепенные уточнения помогут накопить хорошую теоретическую базу для последующего развития.
Подводя итоги, нужно отметить, что самостоятельно построенные дроны уступают в характеристиках моделям заводского производства, особенно если первые – дело рук начинающего конструктора.
Вот только дело в том, что самодельный квадрокоптер и не стремится конкурировать с титанами рынка. Это выбор для тех, кто любит погружаться в интересующую тему, конструировать или совершенствовать конструкции.

Всем привет! После выхода первого же ролика, снятого с собранного мной гексакоптера, народ стал одолевать вопросами и просьбами помочь в постройке аппарата.
В наше время нет дефицита информации, напротив, есть её переизбыток, который очень сложно фильтровать.

Хочу в своей статье ответить на те вопросы, которые поступают практически каждый день от моих знакомых.
А именно:
— Какой коптер лучше и чем они отличаются? (квадро-, три-, гекса-, октакоптер)
— Купить готовый, или собрать самому?
— Какие комплектующие подобрать? Как рассчитывать? Каков минимальный набор для полёта?
— На что снимать – на GoPro или камеру потяжелее?
Думаю, что для начала этих вопросов хватит, чтобы заставить закипеть мозг тех, в чьих головах пока есть только желание разобраться с основами, но нет опыта за плечами.

Время летит, поэтому добавляю в статьи свежие строки, актуальные на сегодняшний день, спустя несколько лет после написания статьи. Буду помечать их курсивом и добавлять ссылки на примеры комплектующих в проверенных магзинах, в которых сам совершал покупки.
Из бюджетных, но проверенных временем аппаратур управления пользуется популярностью FRSky Taranis Q X7. И старший брат — FrSky Taranis X9D Plus
Также на борту стоит приемник сигналов управления, который передает их в ПК.

Современные полётные контроллеры такие, как распространенный DJI Naza-m v2 представляют собой целые наборы.

Если вы всё-таки решились собирать мультикоптер самостоятельно, попробую объяснить основные принципы. Важно сразу понять, какой снаряженный вес будет в итоге у аппарата и вести расчеты, отталкиваясь от него. Можно найти готовые конфигурации на форумах и перепроверить их на специальном калькуляторе, о котором я расскажу далее. Важен также такой момент, что этот калькулятор не знает, возможно ли физически установить пропеллеры расчетного размера на вашу раму и можно ли их вообще ставить на заданные двигатели.
1. Поэтому первым делом определяемся с рамой, узнаем её вес, максимальный размер пропеллеров, которые возможно установить.
2. Подбирая моторы, сразу смотрим на сайте производителя таблицы характеристик с рекомендуемыми пропеллерами. К примеру я использую моторы SunnySky v3508 kv580
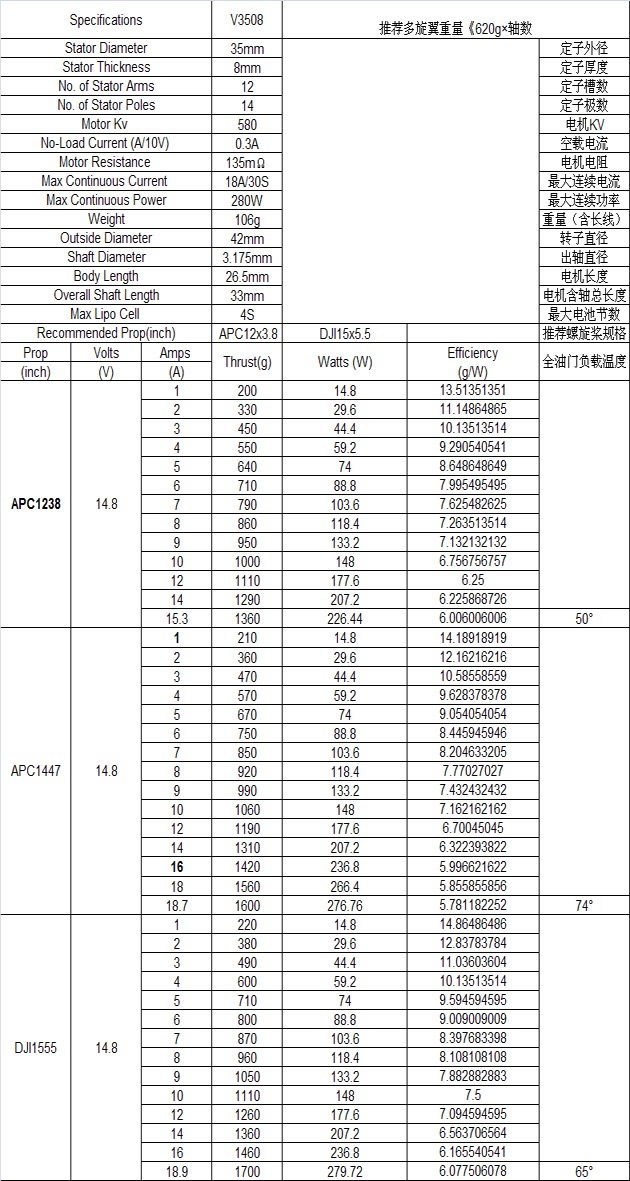
И тут хочу акцентировать внимание на параметры мотора. В названии мотора зашифрованы его основные параметры V3508 kv580, где v — это серия, 35мм — диаметр статора, 8 мм — это длина статора. А параметр KV говорит об оптимальных для данного мотора оборотах висения летательного аппарата. То есть, имея оптимальные обороты висения и вес аппарата, нам придется под них подбирать пропеллеры с нужными параметрами, чтобы добиться оптимальных показателей. В таблице видно, что для данных моторов производителем рекомендуются 3 вида пропеллеров: 1238, 1447 и 1555. Во втором столбце видим, что везде значение напряжения стоит 14.8 вольт. То есть данные моторы используются только с 4S батареями. Для одних и тех же моторов в таблице могут даваться показания для разного вольтажа, и нужно быть очень внимательным, ведь моторы, которые работают и с 11.1 вольтовыми 3S батареями и с 14.8 вольтовыми 4S батареями, как правило, допускают максимальный размер пропеллеров при 3S батареях меньше, чем при 4S, так как мотору может просто не хватить мощности раскручивать тяжелые для него пропеллеры, и есть вероятность перевернуть коптер вверх ногами прямо в полёте. (Со мной такое случалось). Вот пример таблицы для моторов SunnySky 2216 kv800
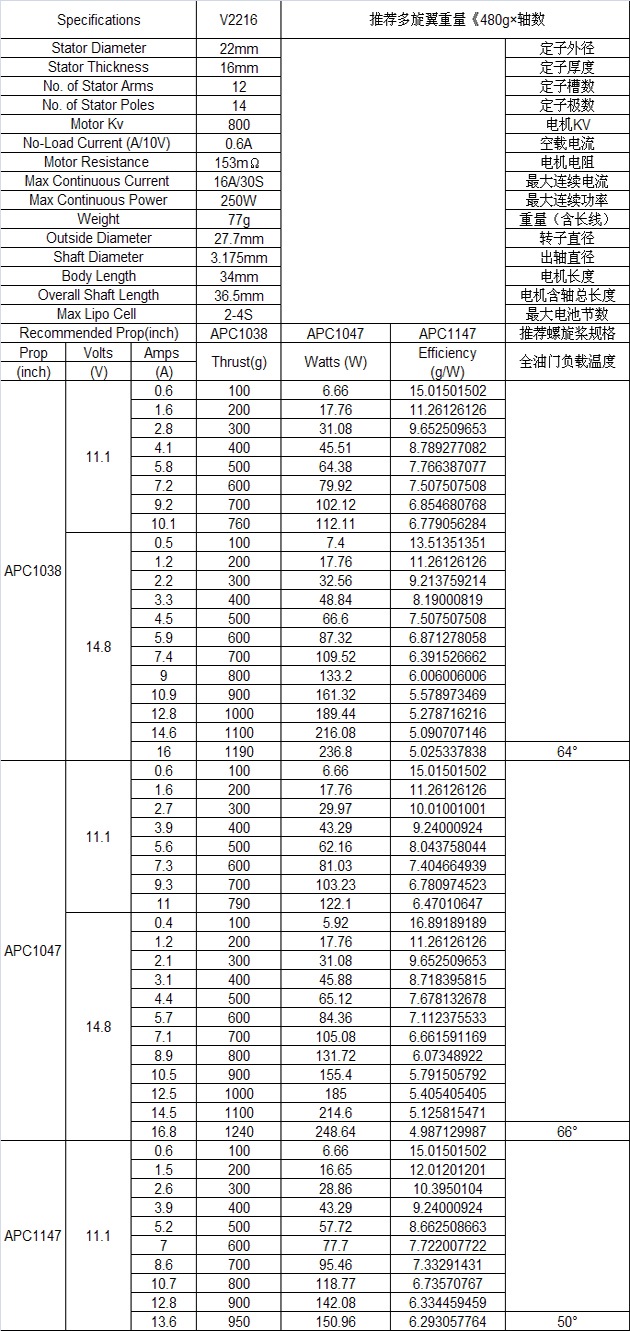
Из этой таблицы видно, что с моторами 2216 при использовании 11.1 вольтовых батарей можно ставить пропеллеры максимального размера 1147, а при 14.8 вольтовых максимум 1047-е пропеллеры. Теперь, чтобы сложить картину воедино, следует пояснить маркировку пропеллеров. На самом деле, размер обозначает только первое двузначное число, а второе означает шаг. Размеры даются в дюймах. Маркировка 1047 означает, что пропеллеры 10-тидюймовые, а шаг на один оборот составляет 4,7 дюйма.
Выше я уже привел ссылку на видео случая из моей первой конфигурации, когда я на моторы 2216 kv800 установил пропеллеры 1238. На видео с 17й секунды видно, что при снижении, либо порыве ветра аппарат начинает амплитудно раскачиваться. Закончилось это тем, что коптер перевернулся в воздухе и приземлился вверх ногами на асфальт. Во-первых, моторы перегреваются и могут вообще перегореть в полёте, во-вторых, у них банально не хватает силы резко раскручивать нужные пропеллеры для стабилизации положения коптера, в итоге аппарат себя раскачивает все сильнее и сильнее.
Также, прежде чем перейти к этапу расчетов, важно пополнить свои знания информацией о литий-полимерных батареях. Они встречаются сейчас повсеместно — в телефонах, планшетных компьютерах, ноутбуках и других устройствах. Эти батареи имеют максимальную ёмкость относительно веса и максимальную токоотдачу, минимальное время заряда. Но при этом батареи токсичны и даже взрывоопасны.
Они непременно взрываются при сильном механическом повреждении, при чрезмерном перезаряде, при замыкании. Эту информацию важно знать и тем, кто не планирует собирать себе коптер.
Li-Po батареи нужно заряжать, транспортировать и хранить в специальных огнеупорных конвертах.

Теперь давайте разберем параметры в описании батареи.

К примеру :
ONBO 5200mAh 4S 45C Lipo Pack:
• Емкость: 5200mAh
• Напряжение: 4S1P / 4 Cell / 14.8V
• Ток разряда: 45C продолжительный / 90C пиковый
• Вес: 485г (включая провода, разъемы и корпус)
• Размеры: 160x50x32мм
• Балансировочный разъем: JST-XH
• Силовой разъем: T-connector

Подобный индикатор настраивается на определенный уровень напряжения, по достижении которого на любой из ячеек он начинает сигнализировать громким писком. Это очень удобно, если отправлять аппарат в полёт с подключенным устройством, которое настроено на 3,4 вольта. Чтобы знать, что пора приземлять коптер. Ведь важно знать, что порог, до которого можно разряжать Li-Po аккумулятор, чтобы он прослужил долгое время, составляет 3.3 вольта на банку. При полной разрядке аккумулятора, он теряет значительную часть своей ёмкости.
А для правильной его зарядки требуется специальное зарядное устройство, которое умеет балансировать ячейки до равного напряжения и при этом не перезаряжать, чтобы не допустить возгорания.

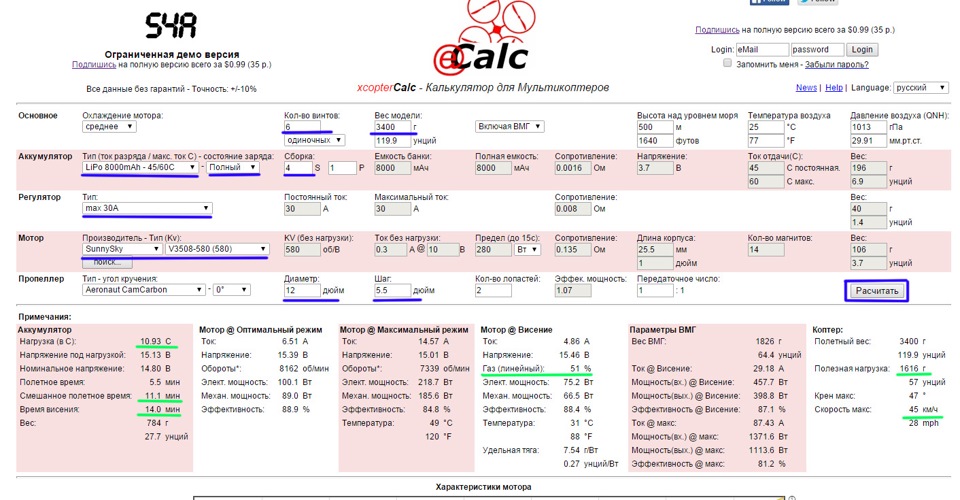
Синим я пометил параметры, которые менял в таблице с параметров по умолчанию после загрузки страницы, а зеленым – наиболее важные строки, на которые стоит обращать особое внимание при расчетах. Как видно, газ висения подобран практически идеально. Для полётного контроллера naza желательно подбирать значения в пределах от 40% до 60%. Газ висения не означает, что если вы оставите стик газа на управлении ровно посередине, мультикоптер начнет подниматься при переизбытке тяги, или опускаться при её недостатке. Нет, на самом деле полётный контроллер сам регулирует обороты двигателя, для того, чтобы оставаться на заданной высоте при положении стика газа ровно посередине. Но если газ висения будет более 60%, значит аппарат перегружен, нужно пробовать пропеллеры с большим шагом, либо большего размера (если это позволяет рама и характеристики двигателей).
Для примера я посчитал эту же конфигурацию, если установить пропеллеры 1447.
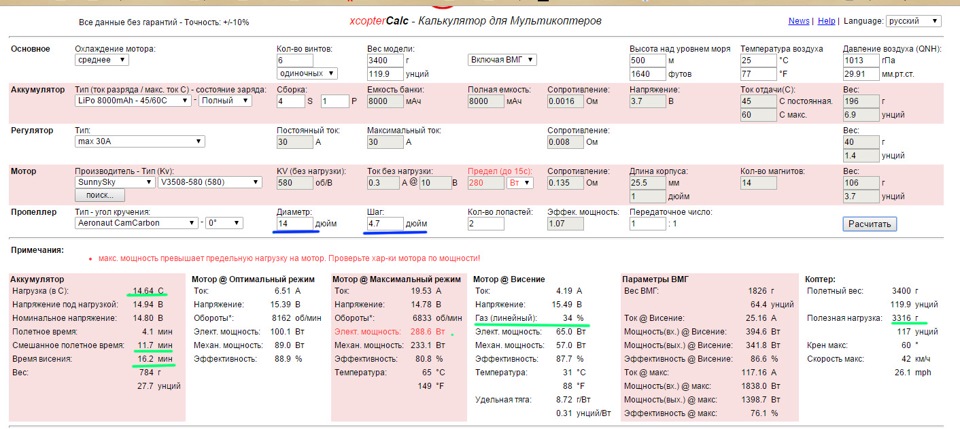
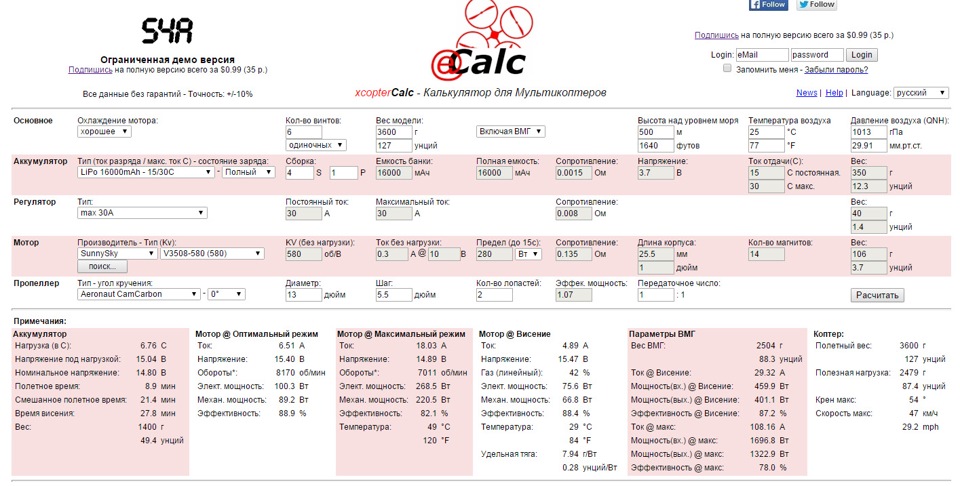
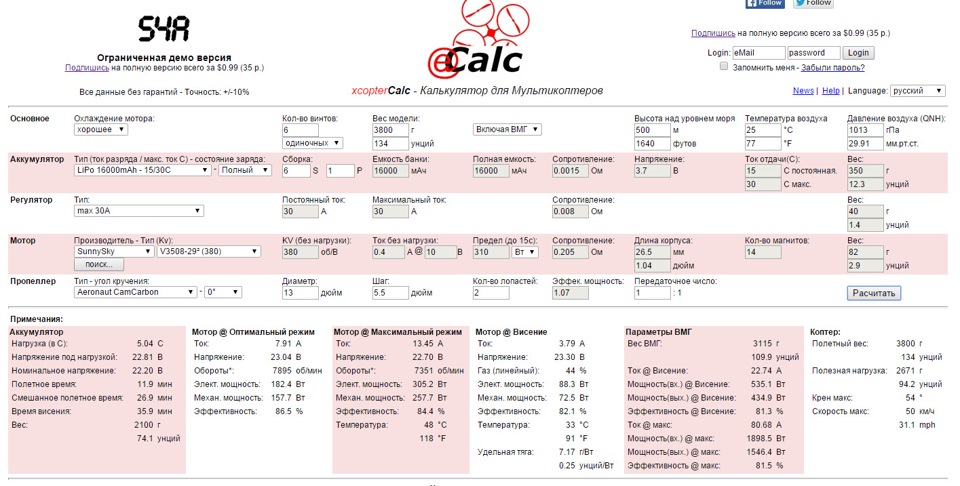
Видим, что совсем незначительное увеличение времени полёта ощутимо сказалось на нагрузке аккумулятора, которая возросла с 11 до 15С и нагрузке на мотор. В максимальном режиме даже выводится предупреждение о превышении допустимой нагрузки. Но при этом полезная нагрузка возросла почти вдвое, а газ висения снизился до 34%, то есть образовался небольшой избыток тяги. Такая конфигурация подошла бы, если бы я захотел повесить на свой коптер не GoPro, а камеру типа Panasonic GH4K или sony nex. Но тогда время полёта ощутимо сократится, ведь возрастет вес. Для полётов с такими камерами я приведу расчет в самом конце, а пока привожу пример, если на такой-же конфигурации использовать батарею большой ёмкости – 16000 mah. Её вес 1 кг (10С), она относительно недорогая – на сегодняшний день можно купить ее за 7300 руб с доставкой по РФ. Но и пропеллеры в расчетах уже ставлю не 1255, а 1355, так как возрастет вес аппарата.

Надеюсь, что моя статья будет для вас полезной. К вопросу о покупке деталей и запчастей для сборки, я пользуюсь известными всем иностранными торговыми площадками ebay и aliexpress, hbbyking и подобными.
Привет! Давно хотел написать подобную статью с максимально подробной инструкцией как собрать квадрокоптер своими руками. Но сразу скажу, что цена такого квадрокоптера выйдет около 11 тысяч рублей. Это без учета стоимости FPV шлема, аккумуляторов, радиоаппаратуры и зарядного устройства. А полный комплект обойдется вам в примерно 21000 рублей. Подробнее о стоимости квадрокоптера можно, например, почитать здесь и здесь (окончание статьи с итогами). Сборка получилась весьма интересной, шустрой и крепкой. В общем, на текущий момент это мой любимый квадрокоптер.
Краткий обзор комплектующих.
Рама — Transtec Frog Lite II (Купить можно здесь(Aliexpress)
Моторы — Aokfly DR2205 2500kv (Покупаем здесь (Aliexpress)
Полетный контроллер Mamba F405 mini MK2 в стэке с регулятором ESC 4-в-1 (Покупал здесь (Aliexpress)
Приемник радиоаппаратуры Flysky FS-IA6B, модернизированный (добавлены каналы, уменьшен размер и добавлена функция RSSI). О том, как это сделать описано в статье про RSSI. Но я сразу вам рекомендую облегчить задачу и заказать себе что-нибудь миниатюрное типа Fli14 и будет вам счастье.
Сборка рамы.

Вот так выглядит рама нашего будущего квадрокоптера в разобранном виде (слева расположена карма квадрокоптера). Во-первых, вы должны зафиксировать все 4 луча квадрокоптера между двумя центральными пластинами. Сделайте это с помощью 8 винтов из комплекта. 4 самых близких винта проденьте шляпкой вниз и затяните обычной гайкой (капните немного синего фиксатора на резьбовое соединение), 2 крайних правых и два крайних левых (на рисунке это нижние и верхние) — шляпкой вверх и затяните гайками с пластмассовыми втулками. Этим гайкам фиксатор не нужен.
Установка моторов на раму.

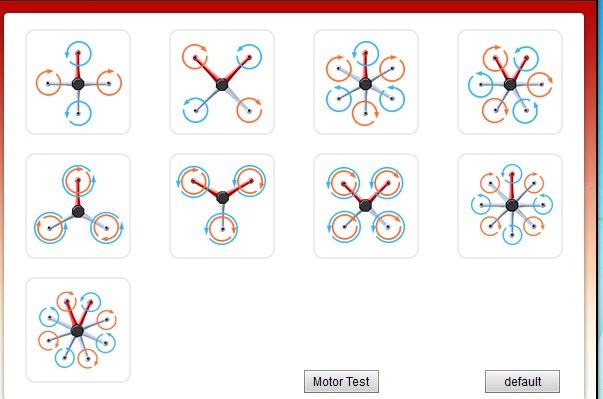
Теперь надеваем защиту на лучи и распределяем моторы квадрокоптера по направлению вращения. CW — моторы с вращением по часовой стрелке, CCW — против часовой. Провода должны смотреть в сторону центра квадрокоптера вдоль лучей. Классическая схема, по которой должны вращаться моторы, указана на рисунке. Но так как мы с вами собираем квадрокоптер своими руками, то вы можете выбрать абсолютно противоположный вариант. В общем, это потом легко настраивается.
Прикручиваем их, но не забываем капать фиксатор резьбы на соединения. Винты крепления нужны с длиной резьбовой части 7 мм. Этот квадрокоптер имеет толщину лучей 4 мм, плюс защита торцов 1 мм, плюс 2 мм само соединение. Итого 7 мм.
Главное не переборщите с длиной и перед затягиванием убедитесь в том, что винт не повредит обмотку мотора.
Установка регулятора оборотов 4-в-1.


Чтобы правильно сориентировать регулятор оборотов, достаточно глянуть на обозначения номеров моторов на углах платы и надеть плату на 4 центральных винта. Контакты +/- должны оказаться сзади. Зафиксируйте плату нейлоновыми стойками, идущими в комплекте со стеком Mamba F405. Далее уже приступаем непосредственно к пайке компонентов.
Прежде чем паять моторы к регулятору, отмеряем длину проводов до ближайших 3 контактов (относительно каждого мотора/луча) с небольшим запасом, отрезаем. Зачищаем провод где то на 3 мм, лудим. Лудим все контакты на плате регулятора. Дальше припаиваем провода от моторов также как на рисунке. Провода от моторов припаиваются к трем соответствующим этому мотору площадкам в любом порядке.

К контактам +/- припаиваем коннектор XT-60 как показано на рисунке. На этом можно считать работу с силовой частью квадрокоптера завершенной.
Теперь пришло время снабдить наш квадрокоптер глазами, ушами и мозгом.
Подключение FPV системы, приемника и пищалки к полетному контроллеру квадрокоптера.
Подключение FPV камеры.

Все FPV камеры, так или иначе, практически не отличаются друг от друга способом подключения к полетному контроллеру. Чаще всего из камеры выходят 3 провода: черный — минус питания камеры (земля), красный — плюс питания камеры, желтый — видеосигнал. Теперь давайте разберем наш случай: камера Foxeer Predator 4 поддерживает напряжение питания 5-40 вольт. Наш полетный контроллер имеет на борту преобразователь напряжения на 5 и на 9 вольт. Например, будем использовать 9 вольт. Все контакты на плате Mamba F405 удобно распределены по группам для того, чтобы было легче паять (смотрите картинку). Хочу отметить, что я прежде всего припаиваю всю периферию, а уже потом устанавливаю плату на нейлоновые стойки. Делаю я так для правильной пайки. То есть, другими словами, провода продеваем в отверстия снизу, а припаиваем сверху, а не как многие блогеры, суют провод в отверстие и тут же жарят изоляцию. Дальше на фото будет видно, что я имею ввиду.
Вот мы присоединили камеру, теперь полетный контроллер уже умеет принимать сигнал от нее и накладывать различную информацию на картинку (OSD-on screen display), но еще не умеет передавать изображение в FPV очки или шлем. Для этого нужен видеопередатчик.
Подключение видеопередатчика.

Выбранный мной передатчик Foxeer Clear/ClearTX2 имеет шесть контактов.
Красный — плюс питания передатчика, черный — минус питания, зеленый — SmartAudio (позволяет управлять мощностью с пульта радиоаппаратуры), желтый — вход видеосигнала из ПК после наложения на него информации (OSD). Есть еще черный и белый провода для питания камеры, но нам они в этой сборке не нужны. Обрезаем коннектор со стороны ПК, зачищаем, лудим провода и припаиваем согласно рисунку. Все провода желательно скручивать для того, чтобы уменьшить воздействие помех от регулятора оборотов.
Подключение приемника Flysky FS-iA6b по протоколу i-bus.
Ну, вот мы и подобрались к моменту компоновки всех деталей нашего самодельного квадрокоптера.
Окончательная сборка квадрокоптера.
Буду приводить картинки и прокомментирую все дальнейшие действия, я думаю, что все будет понятно.

Теперь несколько слов о недостатках этой сборки и о том, как я вышел из данной ситуации. Главный недостаток — это размер приемника! (мне просто надо было его куда то пристроить). В самом начале статьи я рекомендовал вам выбрать миниатюрный приемник. Но даже с такими его размерами, я постарался не испортить внешний вид квадрокоптера. Я спроектировал и распечатал на 3д принтере крышку (скачать stl файл), под которую спрятал видеопередатчик. Кроме того, удобно закрепил антенну на ней. По-моему получилось неплохо…
Прошивка и настройка самодельного квадрокоптера.
Ну вот, мы своими руками собрали квадрокоптер, осталось его настроить.
Первым делом устанавливаем необходимые приложения: Betaflight Configurator и BLHeli Configurator. Первый нужен для прошивки и настройки полетного контроллера, а второй для настройки регулятора оборотов. Оба конфигуратора можно установить двумя способами: Во-первых, если у вас браузер Chrome, то их можно установить в качестве расширений для него. Во-вторых, можно установить их как отдельные приложения. Ссылки ниже:
Прошивка.
Настроим квадрокоптер своими руками.
Изменение направления вращения моторов квадрокоптера.
- Закрываем Betaflight.
- Открываем BLHeli Configurator.
- Подключаем ПК к компьютеру и жмем Connect (аккумулятор должен быть присоединен к квадрокоптеру)
- Нажимаем Read Setup, должна появиться вот такая информация
- Esc 1, Esc 2 и так далее соответствуют номерам наших моторов 1,2,3 и 4. Например, нам надо изменить направление вращения мотора №1. В выпадающем списке Motor Direction меняем значение Normal на Reversed. Теперь мотор будет крутиться в противоположную сторону. Точно так же делаем для всех моторов, которым надо изменить направление вращения.
- Жмем Write Setup. Закрываем BLHeli Configurator. В общем, вы еще раз можете проверить, все ли вы правильно сделали, в Betaflight.
Настройка радиоаппаратуры Flysky.
Как проверить, требуется ли делать реверс основных каналов в аппаратуре? ![]()




Как вы можете видеть, в моем случае ничего менять не пришлось. На этом этапе будьте аккуратны и не включите реверс третьего канала (газ). Это может привести к тому, что при включении квадрокоптера он даст газ на полную!
AUX каналы.
Под AUX каналами в радиоаппаратуре подразумевают всякие дополнительные тумблеры и крутилки, которые используют для включения различных функций, а также управляют полетными режимами квадрокоптера. У нашего приемника Flysky FS-iA6b 6 каналов. Но всего 2 дополнительных. Допустим, что у нас один дополнительный канал будет отвечать за включение пищалки (крайний левый тумблер), а второй (трехпозиционный переключатель) — за изменение полетного режима. В аппаратуре это делается так:



Здесь я тумблер пищалки (SwA) переназначил на 6 канал (AUX 2), а трехпозиционный переключатель (SwC) установил на 5 канал (AUX 1).
Таким образом, при включении левого тумблера, будет звучать сигнал зуммера. Это полезная функция, которая помогает искать квадрокоптер в траве, если тот, например, упал.
Трехпозиционный переключатель позволит нам выбрать полетный режим: выключенное состояние — Disarm (моторы остановлены), вторая позиция — Arm (Моторы вращаются) и Angle (режим стабилизации), третья позиция — Arm и Acro (акробатический режим). Про режимы я советую вам почитать статьи на просторах рунета, в рамках этой статьи невозможно передать всю информацию по этой теме.
Настройки Failsafe. Квадрокоптер своими руками.
Failsafe — это очень важная функция, миссия которой, сохранить квадрокоптер, сделанный своими руками, в случае потери связи от радиоаппаратуры, а также чужое имущество.
На стороне аппаратуры мы должны настроить Failsafe хотя бы на одном канале. Рекомендую 3 (газ):





На стороне полетного контроллера делаем точно так же, как на картинке:
Работает функция по следующему алгоритму. Например, потеряна связь, квадрокоптер на 3 секунды включает режим стабилизации, тем самым выпрямляет его, затем отключает моторы и включает зуммер (пищалку). Не игнорируйте эту настройку. А еще лучше не выходите в поле, пока не проверили работу функции дома без пропеллеров.
Настройка OSD

На этой вкладке мы долго задерживаться не будем, так как, настройка OSD — это личные предпочтения каждого пилота.
Здесь вы смело можете экспериментировать с той информацией, которую хотите видеть на экране вашего FPV шлема или очков (ставя или убирая галочки), а также с месторасположением их на картинке (просто передвигая надписи). Обычно самым важной информацией для FPV пилота квадрокоптера является израсходованная емкость аккумулятора. Зная ее, вы вовремя посадите свой квадрокоптер и сохраните и его и недешевые аккумуляторы.
Вот вроде бы и все. Перед первым запуском квадрокоптера с установленными пропеллерами, еще раз проверьте следующие моменты:
Во-первых, корректность работы каналов (особенно газа!)
Во-вторых, Failsafe! Для этого достаточно отключить аппаратуру, и посмотреть, работает ли квадрокоптер по нашему сценарию.
В-третьих, я мог, что-то упустить из виду и не описать в статье какую-нибудь мелочь. Пишите комментарии, я постараюсь быстро ответить.
UPD: Как настроить датчик тока на полетном контроллере квадрокоптера? Читайте здесь.

Всем доброго времени суток! Хочу вам рассказать о том, как я строил свой первый квадрокоптер, в каком он сейчас состоянии и мои дальнейшие планы на него.

Сначала, подобрав размер квадра, приступил к зарисовке чертежа на куске обоев.
Кстати, размер выбрал 45 - универсальный, так как это мой первый дрон, и в каком направлении буду развиваться пока не знаю.
Собрав дома весь стеклотекстолит, приступил к выпиливанию двух одинаковых основ, между которыми будут зажаты лучи.
Материалом для изготовления лучей послужил алюминиевий квадратный профиль 10*10мм
Предварительная версия.
Крепил лучи между основами с помощью винтов и гаек, ничего другого не придумал)
Идём далее.
Ноги, шасси делал также из стеклотекстолита. Нарисовав эскиз, приступил к нарезке заготовок
После чего приступил к мучению шуруповёрта
Несмотря ни на что, дрон всё-таки встал на свои ноги)

А теперь - взвешивание. Вес рамы, без какого-либо оборудования, составил 263 грамма. Я думаю что это достаточно приемлемый вес, а что думаете вы?
Припаял все нужные провода (регуляторов, габаритных огней).
Перфекционистам не смотреть)))
Проверил работоспособность.
Установив плату распределения питания, приступил к монтажу мозгов. Банально прилепил их на 2-х сторонний скотч.
Также поступил с приемником
Крепление батареи осуществляется благодаря липучкам на нижней основе квадра.
Вот и всё! Полётный вес квадрокоптера - 993 грамма. Прошив полётный контроллер, пошёл на улицу на первые испытания.
Видео полётов смотрите с 2.50 минуты
Квадрокоптер был построен в конце лета 2016, сейчас начало 2017г. За этот период квадрокоптер побывал в небе достаточное количество времени. В данный момент коптер цел, не было ни одного краша, я его немножко модернизировал, для установки камеры на его борт. В дальнейшем хочу на нём научится летать по fpv. Сейчас потихоньку начинаю собирать Fpv систему, видеопередатчик, приёмник уже заказал))
Спасибо всем кто читал выше изложенное, если есть вопросы, советы, пожелания - пишите в комментариях. Ниже представлены фотографии сделанные камерой, установленной на квадрокоптере, ну и сам коптер.
Читайте также: