
Модернизация квадрокоптера своими руками
Добавил пользователь Евгений Кузнецов Обновлено: 19.09.2024
Привет! Давно хотел написать подобную статью с максимально подробной инструкцией как собрать квадрокоптер своими руками. Но сразу скажу, что цена такого квадрокоптера выйдет около 11 тысяч рублей. Это без учета стоимости FPV шлема, аккумуляторов, радиоаппаратуры и зарядного устройства. А полный комплект обойдется вам в примерно 21000 рублей. Подробнее о стоимости квадрокоптера можно, например, почитать здесь и здесь (окончание статьи с итогами). Сборка получилась весьма интересной, шустрой и крепкой. В общем, на текущий момент это мой любимый квадрокоптер.
Краткий обзор комплектующих.
Рама — Transtec Frog Lite II (Купить можно здесь(Aliexpress)
Моторы — Aokfly DR2205 2500kv (Покупаем здесь (Aliexpress)
Полетный контроллер Mamba F405 mini MK2 в стэке с регулятором ESC 4-в-1 (Покупал здесь (Aliexpress)
Приемник радиоаппаратуры Flysky FS-IA6B, модернизированный (добавлены каналы, уменьшен размер и добавлена функция RSSI). О том, как это сделать описано в статье про RSSI. Но я сразу вам рекомендую облегчить задачу и заказать себе что-нибудь миниатюрное типа Fli14 и будет вам счастье.
Сборка рамы.

Вот так выглядит рама нашего будущего квадрокоптера в разобранном виде (слева расположена карма квадрокоптера). Во-первых, вы должны зафиксировать все 4 луча квадрокоптера между двумя центральными пластинами. Сделайте это с помощью 8 винтов из комплекта. 4 самых близких винта проденьте шляпкой вниз и затяните обычной гайкой (капните немного синего фиксатора на резьбовое соединение), 2 крайних правых и два крайних левых (на рисунке это нижние и верхние) — шляпкой вверх и затяните гайками с пластмассовыми втулками. Этим гайкам фиксатор не нужен.
Установка моторов на раму.

Теперь надеваем защиту на лучи и распределяем моторы квадрокоптера по направлению вращения. CW — моторы с вращением по часовой стрелке, CCW — против часовой. Провода должны смотреть в сторону центра квадрокоптера вдоль лучей. Классическая схема, по которой должны вращаться моторы, указана на рисунке. Но так как мы с вами собираем квадрокоптер своими руками, то вы можете выбрать абсолютно противоположный вариант. В общем, это потом легко настраивается.
Прикручиваем их, но не забываем капать фиксатор резьбы на соединения. Винты крепления нужны с длиной резьбовой части 7 мм. Этот квадрокоптер имеет толщину лучей 4 мм, плюс защита торцов 1 мм, плюс 2 мм само соединение. Итого 7 мм.
Главное не переборщите с длиной и перед затягиванием убедитесь в том, что винт не повредит обмотку мотора.
Установка регулятора оборотов 4-в-1.


Чтобы правильно сориентировать регулятор оборотов, достаточно глянуть на обозначения номеров моторов на углах платы и надеть плату на 4 центральных винта. Контакты +/- должны оказаться сзади. Зафиксируйте плату нейлоновыми стойками, идущими в комплекте со стеком Mamba F405. Далее уже приступаем непосредственно к пайке компонентов.
Прежде чем паять моторы к регулятору, отмеряем длину проводов до ближайших 3 контактов (относительно каждого мотора/луча) с небольшим запасом, отрезаем. Зачищаем провод где то на 3 мм, лудим. Лудим все контакты на плате регулятора. Дальше припаиваем провода от моторов также как на рисунке. Провода от моторов припаиваются к трем соответствующим этому мотору площадкам в любом порядке.

К контактам +/- припаиваем коннектор XT-60 как показано на рисунке. На этом можно считать работу с силовой частью квадрокоптера завершенной.
Теперь пришло время снабдить наш квадрокоптер глазами, ушами и мозгом.
Подключение FPV системы, приемника и пищалки к полетному контроллеру квадрокоптера.
Подключение FPV камеры.

Все FPV камеры, так или иначе, практически не отличаются друг от друга способом подключения к полетному контроллеру. Чаще всего из камеры выходят 3 провода: черный — минус питания камеры (земля), красный — плюс питания камеры, желтый — видеосигнал. Теперь давайте разберем наш случай: камера Foxeer Predator 4 поддерживает напряжение питания 5-40 вольт. Наш полетный контроллер имеет на борту преобразователь напряжения на 5 и на 9 вольт. Например, будем использовать 9 вольт. Все контакты на плате Mamba F405 удобно распределены по группам для того, чтобы было легче паять (смотрите картинку). Хочу отметить, что я прежде всего припаиваю всю периферию, а уже потом устанавливаю плату на нейлоновые стойки. Делаю я так для правильной пайки. То есть, другими словами, провода продеваем в отверстия снизу, а припаиваем сверху, а не как многие блогеры, суют провод в отверстие и тут же жарят изоляцию. Дальше на фото будет видно, что я имею ввиду.
Вот мы присоединили камеру, теперь полетный контроллер уже умеет принимать сигнал от нее и накладывать различную информацию на картинку (OSD-on screen display), но еще не умеет передавать изображение в FPV очки или шлем. Для этого нужен видеопередатчик.
Подключение видеопередатчика.

Выбранный мной передатчик Foxeer Clear/ClearTX2 имеет шесть контактов.
Красный — плюс питания передатчика, черный — минус питания, зеленый — SmartAudio (позволяет управлять мощностью с пульта радиоаппаратуры), желтый — вход видеосигнала из ПК после наложения на него информации (OSD). Есть еще черный и белый провода для питания камеры, но нам они в этой сборке не нужны. Обрезаем коннектор со стороны ПК, зачищаем, лудим провода и припаиваем согласно рисунку. Все провода желательно скручивать для того, чтобы уменьшить воздействие помех от регулятора оборотов.
Подключение приемника Flysky FS-iA6b по протоколу i-bus.
Ну, вот мы и подобрались к моменту компоновки всех деталей нашего самодельного квадрокоптера.
Окончательная сборка квадрокоптера.
Буду приводить картинки и прокомментирую все дальнейшие действия, я думаю, что все будет понятно.

Теперь несколько слов о недостатках этой сборки и о том, как я вышел из данной ситуации. Главный недостаток — это размер приемника! (мне просто надо было его куда то пристроить). В самом начале статьи я рекомендовал вам выбрать миниатюрный приемник. Но даже с такими его размерами, я постарался не испортить внешний вид квадрокоптера. Я спроектировал и распечатал на 3д принтере крышку (скачать stl файл), под которую спрятал видеопередатчик. Кроме того, удобно закрепил антенну на ней. По-моему получилось неплохо…
Прошивка и настройка самодельного квадрокоптера.
Ну вот, мы своими руками собрали квадрокоптер, осталось его настроить.
Первым делом устанавливаем необходимые приложения: Betaflight Configurator и BLHeli Configurator. Первый нужен для прошивки и настройки полетного контроллера, а второй для настройки регулятора оборотов. Оба конфигуратора можно установить двумя способами: Во-первых, если у вас браузер Chrome, то их можно установить в качестве расширений для него. Во-вторых, можно установить их как отдельные приложения. Ссылки ниже:
Прошивка.
Настроим квадрокоптер своими руками.
Изменение направления вращения моторов квадрокоптера.
- Закрываем Betaflight.
- Открываем BLHeli Configurator.
- Подключаем ПК к компьютеру и жмем Connect (аккумулятор должен быть присоединен к квадрокоптеру)
- Нажимаем Read Setup, должна появиться вот такая информация
- Esc 1, Esc 2 и так далее соответствуют номерам наших моторов 1,2,3 и 4. Например, нам надо изменить направление вращения мотора №1. В выпадающем списке Motor Direction меняем значение Normal на Reversed. Теперь мотор будет крутиться в противоположную сторону. Точно так же делаем для всех моторов, которым надо изменить направление вращения.
- Жмем Write Setup. Закрываем BLHeli Configurator. В общем, вы еще раз можете проверить, все ли вы правильно сделали, в Betaflight.
Настройка радиоаппаратуры Flysky.
Как проверить, требуется ли делать реверс основных каналов в аппаратуре? ![]()




Как вы можете видеть, в моем случае ничего менять не пришлось. На этом этапе будьте аккуратны и не включите реверс третьего канала (газ). Это может привести к тому, что при включении квадрокоптера он даст газ на полную!
AUX каналы.
Под AUX каналами в радиоаппаратуре подразумевают всякие дополнительные тумблеры и крутилки, которые используют для включения различных функций, а также управляют полетными режимами квадрокоптера. У нашего приемника Flysky FS-iA6b 6 каналов. Но всего 2 дополнительных. Допустим, что у нас один дополнительный канал будет отвечать за включение пищалки (крайний левый тумблер), а второй (трехпозиционный переключатель) — за изменение полетного режима. В аппаратуре это делается так:



Здесь я тумблер пищалки (SwA) переназначил на 6 канал (AUX 2), а трехпозиционный переключатель (SwC) установил на 5 канал (AUX 1).
Таким образом, при включении левого тумблера, будет звучать сигнал зуммера. Это полезная функция, которая помогает искать квадрокоптер в траве, если тот, например, упал.
Трехпозиционный переключатель позволит нам выбрать полетный режим: выключенное состояние — Disarm (моторы остановлены), вторая позиция — Arm (Моторы вращаются) и Angle (режим стабилизации), третья позиция — Arm и Acro (акробатический режим). Про режимы я советую вам почитать статьи на просторах рунета, в рамках этой статьи невозможно передать всю информацию по этой теме.
Настройки Failsafe. Квадрокоптер своими руками.
Failsafe — это очень важная функция, миссия которой, сохранить квадрокоптер, сделанный своими руками, в случае потери связи от радиоаппаратуры, а также чужое имущество.
На стороне аппаратуры мы должны настроить Failsafe хотя бы на одном канале. Рекомендую 3 (газ):





На стороне полетного контроллера делаем точно так же, как на картинке:
Работает функция по следующему алгоритму. Например, потеряна связь, квадрокоптер на 3 секунды включает режим стабилизации, тем самым выпрямляет его, затем отключает моторы и включает зуммер (пищалку). Не игнорируйте эту настройку. А еще лучше не выходите в поле, пока не проверили работу функции дома без пропеллеров.
Настройка OSD

На этой вкладке мы долго задерживаться не будем, так как, настройка OSD — это личные предпочтения каждого пилота.
Здесь вы смело можете экспериментировать с той информацией, которую хотите видеть на экране вашего FPV шлема или очков (ставя или убирая галочки), а также с месторасположением их на картинке (просто передвигая надписи). Обычно самым важной информацией для FPV пилота квадрокоптера является израсходованная емкость аккумулятора. Зная ее, вы вовремя посадите свой квадрокоптер и сохраните и его и недешевые аккумуляторы.
Вот вроде бы и все. Перед первым запуском квадрокоптера с установленными пропеллерами, еще раз проверьте следующие моменты:
Во-первых, корректность работы каналов (особенно газа!)
Во-вторых, Failsafe! Для этого достаточно отключить аппаратуру, и посмотреть, работает ли квадрокоптер по нашему сценарию.
В-третьих, я мог, что-то упустить из виду и не описать в статье какую-нибудь мелочь. Пишите комментарии, я постараюсь быстро ответить.
UPD: Как настроить датчик тока на полетном контроллере квадрокоптера? Читайте здесь.
Для тех, кто хочет получить удовольствие от полетов, но ограничен в средствах, вышел новый ультрабюджетный квадрокоптер Syma X5C. Который имеет все шансы стать лидером в бюджетном сегменте благодаря сбалансированности неплохого качества и невысокой цены.

Заводской вариант возможностей
Дизайн квадрокоптера повторяет ставший уже классикой DJI Phantom только в уменьшенной версии. Как и у фантома имеет нижнюю подсветку, спереди – красную, сзади – зеленую. Подсветка, во-первых, помогает не потерять квадрокоптер в темное время суток, во-вторых, позволяет пилоту определить какой стороной летит коптер. И в третьих – это делает дизайн нового дрона более ярким и привлекательным.

Стоить отметить довольно высокое качество и ударопрочность пластика корпуса, дрон довольно сложно разбить. Для защиты винтов в комплекте предусмотрены защитные кожухи. Таким образом, даже если вы не справитесь с управлением, удар примет на себя кожух, сохранив лопасть. Это особенно важно при полетах в ограниченном замкнутом пространстве. Для предохранения от повреждения камеры, в комплекте предусмотрены специальные шасси в форме лыж.
Новый квадрокоптер получился достаточно компактным, его размеры составляют 31 на 31 см при высоте 8 см. Вес Сима Х5С всего лишь 100 гр.
Комплектация
Комплектация квадрокоптера X5C включает все необходимое для полета:
- сам аппарат установленными моторами и винтами
- пульт управления 2.4 Ггц.
- литий-полимерный аккумулятор 3.7 вольта, емкостью 500мАч
- провод USB для зарядки аккумулятора
- запасные винта 4 шт.
- защитные кожухи на винты
- посадочные лыжи
- отвертка
- инструкция на анг.
- карта памяти MicroSD на 2 Ггб
- картридер
Единственное, что придется докупить это четыре батарейки AAA для пульта управления.

Дополнительное преимущество – наличие в свободной продаже практически любой запчасти. Вы можете отдельно приобрести моторы, лопасти и даже корпус. Все это доступно в китайских магазинах.
Летные характеристики
Для бюджетной модели дрон Сима Х5С довольно стабилен в полете и хорошо управляется. Если хотите получить максимальное удовольствие от полета – рекомендуем снять камеру, защиту лопастей и шасси, тем самым уменьшив вес аппарата. Для любителей акробатического пилотажа предусмотрена возможность выполнения флипов, которые аппарат выполняет очень уверенно.
Флип – поворот аппарата на 360 градусов вокруг своей оси.
Радиус действия квадрокоптера – около 50 м.
Время полета квадрокоптера Syma X5C составляет около 7 минут, но может быть увеличена до 10 минут, если снять камеру и защиту.
Пульт
Пульт X5C имеет довольно внушительные размеры и, в отличие от пульта Hubsan, который больше похож на джойстик от игровой приставки, напоминает серьезную аппаратуру. Выдает только наличие бутафорских кнопок по бокам экрана)).

Сверху пульта расположены две кнопки, правая – включение флипа, левая – переключение расходов (высокая/низкая скорость). Также, на пульте расположены стики управления полетом, и кнопки, управляющие съемкой фото и видео. У пульта имеется дисплей, на котором отображаются уровень заряда батареи, качество сигнала, высота полета другие показатели.
Камера
Квадрокоптер Syma X5C оснащен двух мегапиксельной камерой способной снимать видео в разрешении 1280х720 со звуком при 30 кадрах в сек., фото в разрешении 2560х1440. Качество съемки, как и следовало ожидать, не очень высокое, особенно это заметно при плохой освещенности.
Цена и выводы
Средняя стоимость X5C составляет 42 USD. Аппарат получился действительно удачным. Хорошая комплектация, низкая цена при приемлемом качестве, наличие камеры. Все это делает аппарат очень привлекательным для знакомства с миром квадрокоптеров. Syma X5C предлагает свободу творчества, хотите снимать – вешайте камеру, нравится пилотировать и делать флипы – долой все лишнее. Однако если вы опытный пилот X5C вряд ли вас чем-то удивит.
Модернизация дрона
Если базовых возможностей вашего дрона уже недостаточно, можно заняться модернизацией и превратить его в FPV Syma X5C с камерой. Мы расскажем, как из отличного коптера сделать аналог более дорогих моделей при минимальных усилиях.
- Новый аккумулятор емкостью 800 mAh
- Новая камера с Wi-Fi или целый комплект для FPV
- Антенна
- Шасси
Увеличиваем время полета
Прежде всего установим новый аккумулятор, это даст нам прирост во времени полета до 12-15 минут, кроме того, запаса заряда хватить чтобы поднять более тяжелую FPV-камеру.
Превращаем наш Syma в FPV квадрокоптер
Теперь давайте установим новую FPV-камеру с обратной связью по Wi-Fi. Это позволит нам видеть на нашем смартфоне то, что видит наш квадрокоптер. Для этого придется скачать приложение на официальном сайте Syma.
К сожалению, при передаче видео по Wi-Fi, картинка на смартфон передается с задержкой по времени. Это может препятствовать комфортным полетам.
Решить эту проблему поможет комплект для передачи сигнала на частоте 5.8 GHz. В комплект входит 2-х мегапиксельная FPV-камера 720P с передатчиком видео и дисплей с приемником и антенной. Запитывается FPV-камера от бортового аккумулятора. Таким образом, мы превратим наш квадрокоптер в полноценный FPV Syma X5C. Рекомендуем также докупить шасси, чтобы не повредить FPV камеру во время посадки.

Увеличиваем дальность сигнала
Теперь установим настоящую антенну вместо муляжа в пульт. Это даст нам значительный прирост дальности полета и высоты. Для этого нам потребуется вспомнить с какой стороны держать паяльник.
Раскручиваем пульт и выпаиваем старую антенну из передатчика.
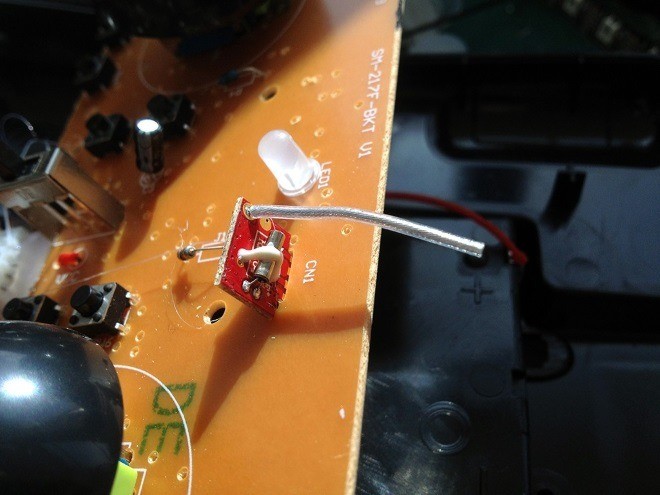
Затем припаиваем купленную нами антенну и выводим ее на корпус пульта.


Остается только проверить наш прибор на практике и порадоваться полученному результату.
Выводы
Путем несложных доработок нам удалось улучшить все ключевые характеристики нашего X5C. Наши улучшения обошлись нам менее чем в 4000 р, при этом мы получили коптер, который существенно превосходит даже более дорогие модели.

Я занимаюсь квадрокоптерами в качестве хобби уже почти полгода. На свой последний аппарат я навесил камеру (GoPro HD Hero 2) и видеопередатчик, и летал на нем через видеоочки — крутейшее ощущение, я вам хочу сказать. Нo техника была нe идеальной. Старая рама X525 с алюминиевыми балками была недостаточно стабильной для веса в 1.8кг, коптер в воздухе потряхивало, да и выглядело это всe достаточно колхозно. Поэтому было принятo решение строить новый квад, на собственноручно разработанной раме, с учетом всех потребностей. А потребности были следующие:
- Место под всe оборудование. На новой раме должно былo быть достаточно места для камеры (без пропеллеров в картинке), передатчика, OSD, большого аккумулятора, плюс электроники управления (плата контроллера полета и GPS).
- Стабильность. Рама должна быть максимально жесткой, но в то же время обеспечивать виброизоляцию камеры от моторов.
- Внешний вид. Хотелось сделать коптер таким, чтобы было приятно на него смотреть, а не типичным для начинающих комком проводов и стяжек на стандартной крестовидной раме.
- (Вторично) Вес. Коптер на базe X525 весил 1.8кг с камерой и батарейкой, хотелось эту цифру слегка уменьшить, заодно и приподнять время полета на одном аккумуляторе.
Разработка
Вдохновением для общей формы коптера послужила рама Spidex v2. Мне понравилось расположение компонентов в одном уровне — камера спереди, потом смещенный вперед центр, и подвешенный сзади аккумулятор. Такая схема позволяет расположить камеру так, что пропеллеры не попадают в ее поле зрения. Также они придумали хороший способ виброизоляции — камера и аккумулятор подвешиваются к двум горизонтальным трубам, которые в свою очередь монтируются на центр с помощью резиновых изоляторов. Масса аккумулятора помогает уменьшить вибрации, передающиеся нa камеру. Ну и смотрится такой коптер, на мой взгляд, очень даже прилично.
Однако полностью под мои потребности Spidex не подходил. Во-первых, в нем использованы алюминиевые трубки, от которых я уже натерпелся — гнутся они, причем даже без аварий, просто от постоянной нагрузки. Во-вторых, я использую камеру GoPro Hero HD2, одолженную на неопределенный срок у сожителя — я нe готов монтировать ее на коптер без защитного корпуса, а Spidex этого не предусматривает.
Короче говоря, от Spidex я решил использовать только общую компоновку. Раму я решил собирать самостоятельно, используя стеклопластиковые пластины и карбоновые трубы с зажимами. У знакомого дома стоит фрезерный станок, на котором можно вырезать пластины необходимой формы. Чтобы создать эту самую форму, я засел за LibreCAD, и вот что у меня получилось:

Общий вид коптера сверху

Центральные пластины и держатели камеры и аккумулятора
Удовлетворившись данным результатом, я передал чертежи знакомому, и заказал всe необходимые детали в местных (немецких) онлайн-магазинах. В частности, были куплены карбоновыe трубки (16x14мм, метровой длины, три штуки — для рамы нужны будут две, ну и про запас), зажимы для них вместе с подходящими винтами/гайками (из набора FCP HL от Flyduino), провода для прокладки через трубки к моторам, виброизоляторы (сайлент-блоки под М3), и куча всякой мелочевки.
Всю электронику я решил использовать с предыдущего коптера. Два квада мнe ни к чему, все прекрасно работает — зачем покупать новые детали? Список той самой электроники и других деталей, перекочевавших с предыдущей модели:
Сборка
Детали разложены на столе, сборка начинается. Порядок долго не продержался…

Для начала пилим трубки под нужную длину — 22см и 28см, все четыре пилятся из одной метровой трубки. Пилкой для металла с мелкими зубьями идет очень хорошо.

Примеряем зажимы к нижнему центру.

Центр собран для проверки, все ли стыкуется как надо. Вроде да.

Прикрутил все остальные части рамы. Похоже, что почти готово? Как бы не так.

Оси моторов нужно обрезать — они выступают с задней стороны, и мешают установке сверху трубок. Обклеиваем мотор клейкой лентой, дабы не допустить попадания металлических опилок внутрь…

… и Дремелем его, Дремелем. Дремель режет 3-миллиметровую ось как нож масло. Главное защитные очки нe забыть.

Снимаем термоусадку с контроллеров моторов, чтобы припаять новые провода.
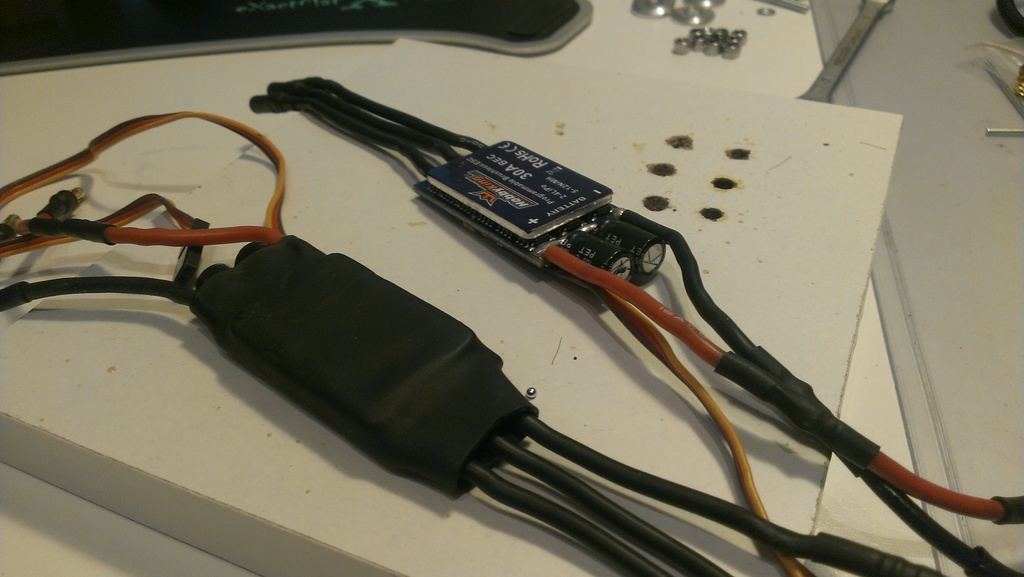
Провода нарезаны под нужную длину. Припаиваем разъмы для моторов. По три фазы на мотор, паять надо дофига — и это всeго лишь квад.

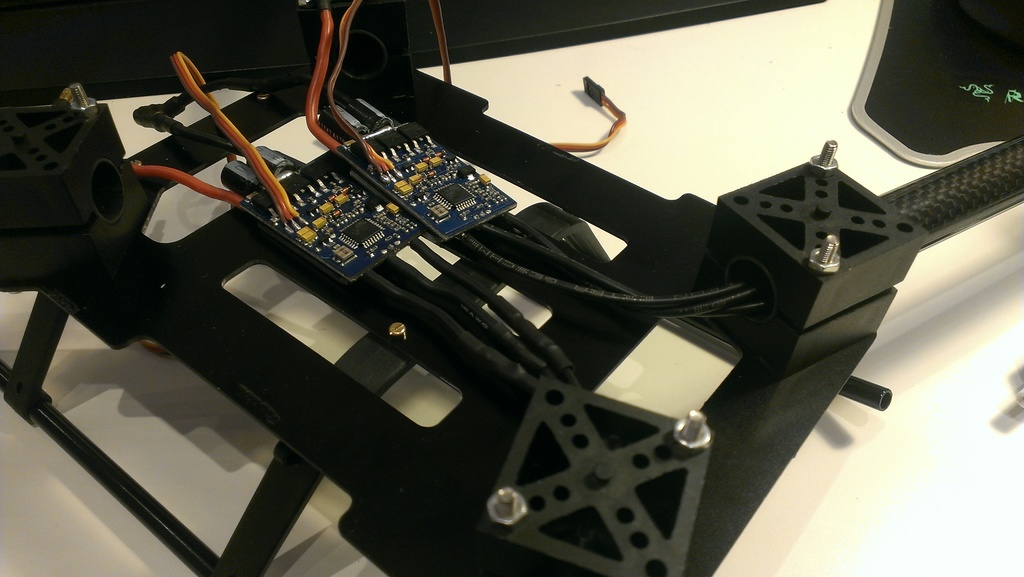
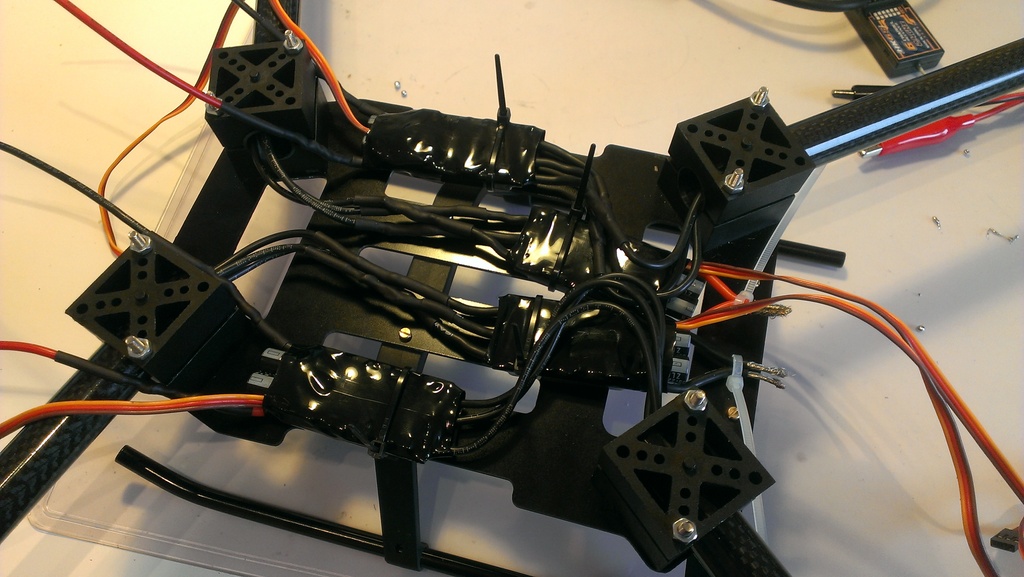
Размещаем контроллеры на нижней полураме.
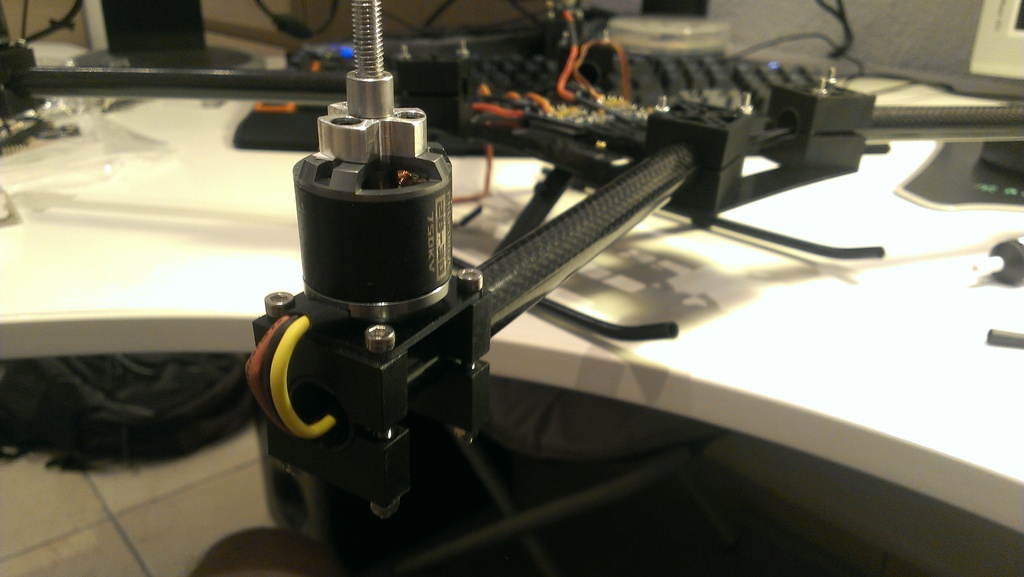
Прикручиваем мотор и проводим кабеля через трубку. Всe собирается, как запланировано!
Изолируем контроллеры новой термоусадкой, когда все кабеля на месте.

Устанавливаем контроллеры моторов на их окончательную позицию. Проводов многовато, но достаточно чисто.
Разводка проводов от аккумулятора, методом RCExplorer. Сначала собираем провода от контроллеров пучком…
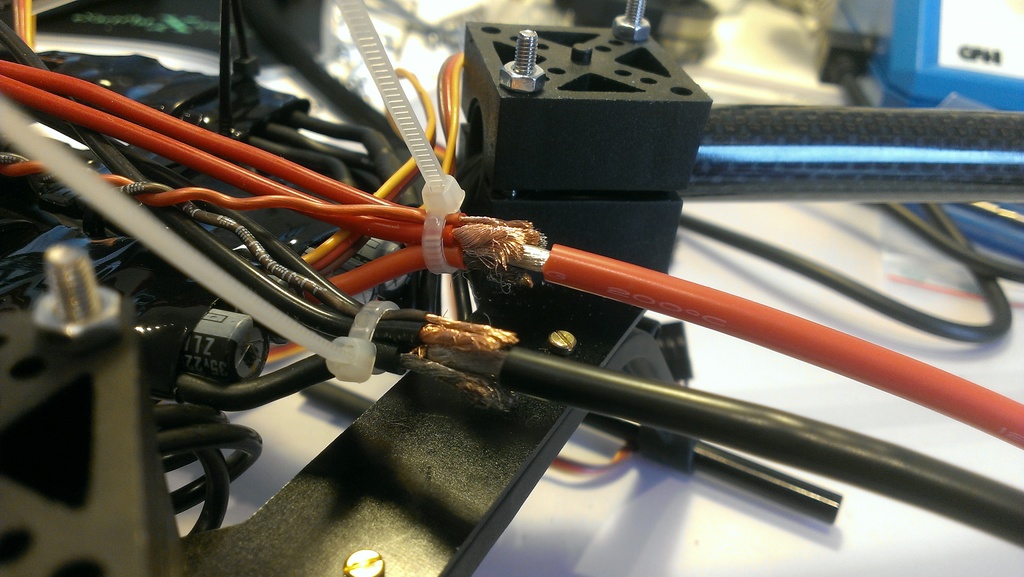
… стягиваем тонкой медной проволокой…
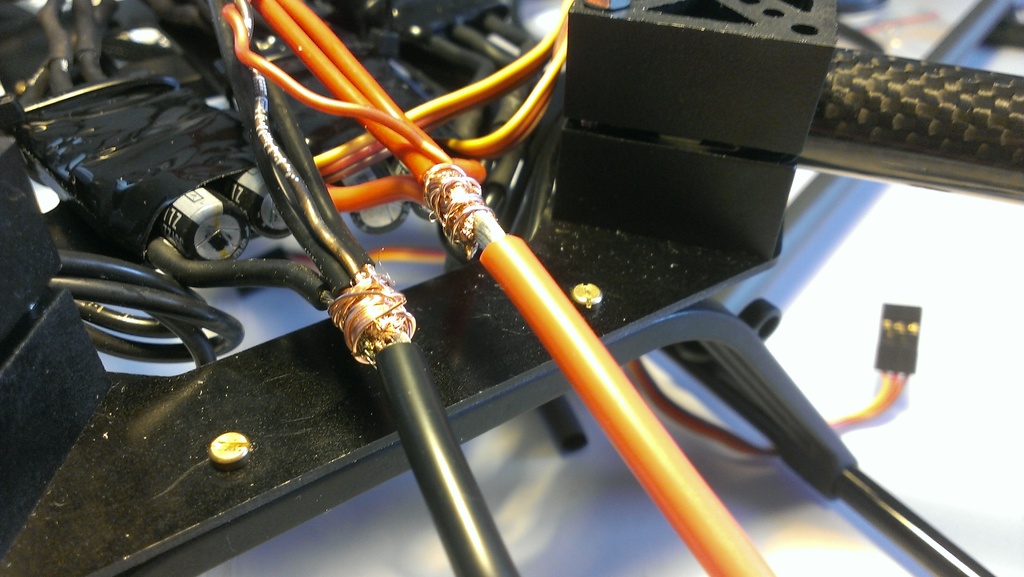
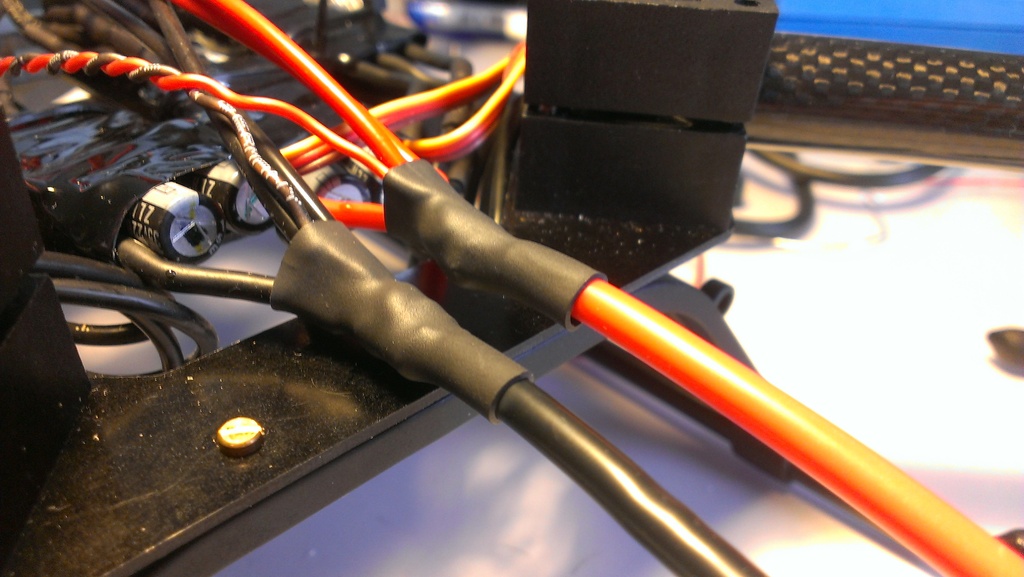
… спаиваем, и изолируем термоусадкой. Соединение получается механически крепкое, и хорошо проводящее.
Примеряем итоговую сборку: все совпадает! Верхняя полурама еще не прикручена, просто лежит сверху.

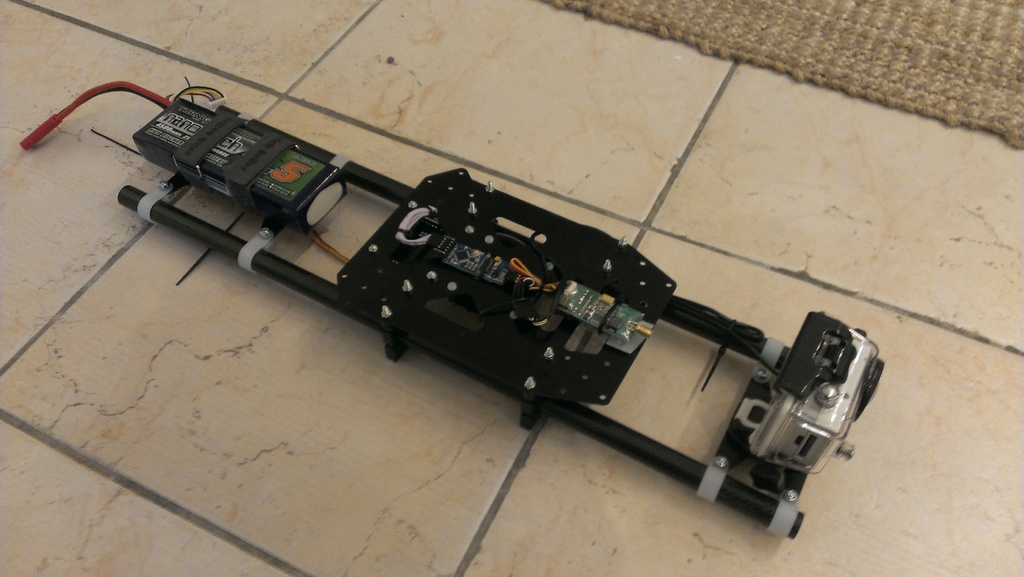
Верхняя полурама с управляющей электроникой в центре (контроллер и GPS) и виброизолированными трубками с камерой и аккумулятором.
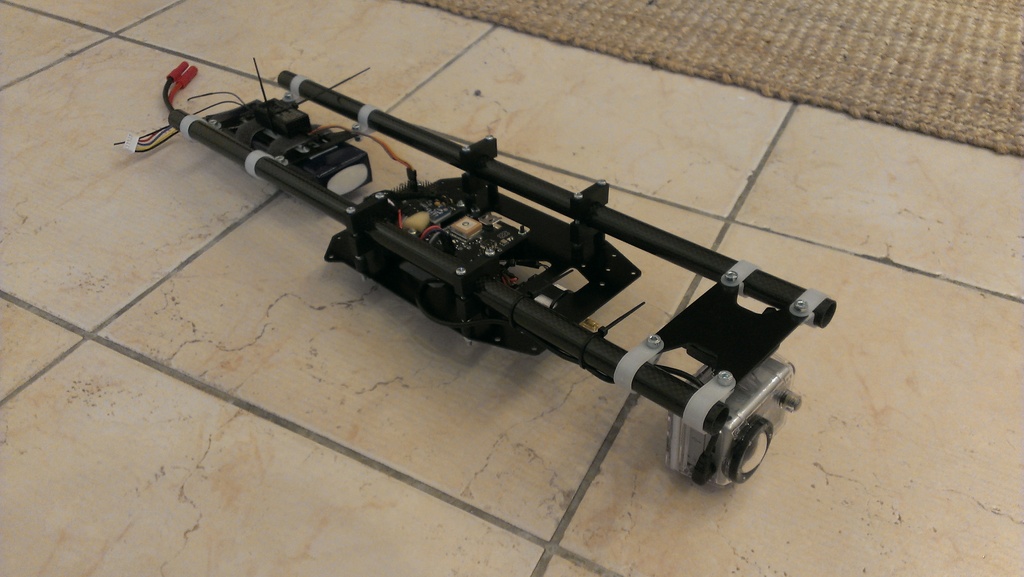
Видеооборудование нa нижней стороне верхнего центра: видеокабель из камеры идет в MinimOSD, там на него накладывается информация из полетного контроллера, и дальше в видеопередатчик.
Нижняя полурама готова к установке верхней. Моторы приподняты, чтобы зажимы в центре не распались, когда будут откручены временные гайки.

Устанавливаем и прикручиваем верхнюю полураму. Затягиваем гайки, соединяем всe провода…


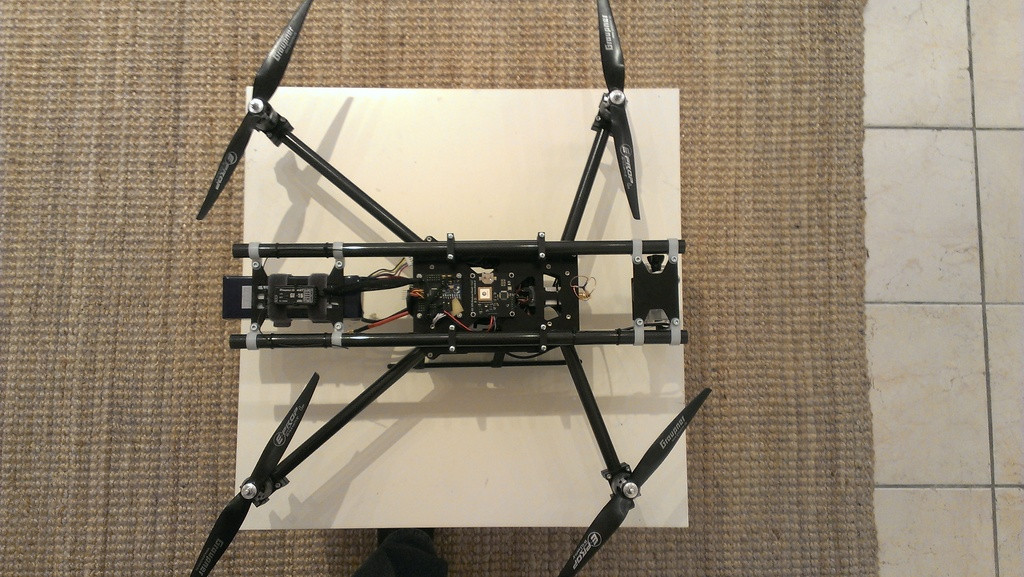



Вот такой коптер получился. Единственное, чем я недоволен — это вес. Облегчить конструкцию не удалось, за счет зажимов для трубок и огромного количества винтов с гайками общий вес поднялся до 1950 грамм. Однако это еще вполне в рамках мощности привода — мои сомнения были полностью развеяны во время первого полета.
Первый полет
Ощущения от первого полета: фантастика! Коптер стоит в воздухe как вкопанный, отлично управляется как визуально, так и через FPV. Время полета на одном заряде — 14 минут, и запаса мощности хватает с лихвой для вполнe комфортабельного полета и маневрирования. С настройками контроллера я еще слегка поковыряюсь — GPS работает плохо (позицию практически не держит, return-to-home не работает), да и PID-параметры надо подстроить (убавить P по оси крена, чтобы избавиться от видимых в видео легких поперечных вибраций).
В общем и целом, проект удался. Коптер я буду активно использовать для полетов и съемок в ближайшие недели.
Вид от первого лица (FPV)
Видеокамера
Подвес
Бесколлекторный подвес
- Бесколлекторные моторы постоянного тока (BLDC — Brushless Direct Current Motor) или (PMSM — Permanent Magnet Synchronous Motor) или (Вентильные электродвигатели (ВД)) — обеспечивают быструю реакцию с минимальной вибрацией, однако требуют присутствия отдельного (и специализированного) бесколлекторного контроллера постоянного тока.
- Чтобы автоматически поддерживать уровень камеры, где-то вокруг камеры (обычно под её креплением) устанавливается инерциальный измерительный блок (IMU), состоящий из акселерометра и гироскопа, так чтобы положение камеры (относительно земли) можно было отслеживать. Показания блока отправляются на отдельную плату бесколлекторного контроллера постоянного тока (часто устанавливаемую прямо над подвесом), который вращает моторы, так, что положение камеры остаётся в определенной ориентации, несмотря на любое перемещение дрона.
- Сама плата контроллера включает в себя встроенный микроконтроллер. Бесколлекторный контроллер постоянного тока карданного подвеса обычно можно подключить непосредственно к каналу на приёмнике (в отличие от контроллера полёта), поскольку он реагирует на изменения ориентации камеры, а не ориентации БПЛА, и, следовательно, не зависит от контроллера полёта.
- Обратите внимание, что поскольку GoPro является популярной экшн-камерой, большинство бесколлекторных подвесов созданы для использования с одной или несколькими моделями GoPro (исходя из размеров GoPro, центра масс, местоположения камеры и т.д.). Вы также заметите, что BLDC подвесы почти всегда имеют демпфирование, которое сводит к минимуму вибрацию, передаваемую от дрона к камере.
Радиоуправляемый сервоподвес
- В основе радиоуправляемого сервоподвеса — сервопривод, как правило, предлагает более медленное время отклика, по сравнению с бесколлекторными подвесами, и излишнюю вибрацию. При этом сервосистемы значительно дешевле бесколлекторных, а 3-контактные сервоприводы в большинстве случаев могут быть подключены непосредственно к полётному контроллеру, что позволяет воспользоваться встроенным в ПК — IMU, для определения уровня относительно земли, и последующего перемещения сервоприводов.
Видеопередатчик (VTX)
Мощность видеопередатчика
Частоты/Каналы видеопередатчика

Большинство видеопередатчиков работают на одной из ниже перечисленных частот. Обратите внимание, что, поскольку вы, вероятно, уже будете использовать стандартную аппаратуру управления, которая работает на определенной частоте, правильным будет выбрать видеопередатчик так, чтобы их частоты не совпадали. Например, если ваше пульт управления работает на частоте 2.4 ГГц, вам следует обратить внимание на видеопередатчик с рабочей частотой: 900 МГц, 1.2ГГц или 5.8ГГц.
900МГц (0.9ГГц)
1.2ГГц (от 1.2 до 1.3 ГГц)
- Используется для дальних FPV полётов, поскольку предлагает хорошее расстояние
- Много разных антенн на рынке
- Частота, как правило, используется множеством других устройств
- Стены и препятствия оказывают большее влияние, чем более низкая частота
- Средний/длинный диапазон
2.4ГГц (от 2.3 до 2.4ГГц)
- Используется для FPV на большие расстояния с небольшим количеством препятствий
- Одна из наиболее широко используемых частот для беспроводных устройств
- Доступны многие аксессуары (антенны, передатчики и т.д.)
- Не следует использовать рядом с параллельно работающими на аналогичной частоте RC передатчиками или другими устройствами, которые могут создавать помехи.
- Может работать с другими частотами, но не будет рассмотрено в этом разделе.
5.8ГГц
- Отлично подходит для применения на малых расстояниях
- Стены и другие препятствия оказывают существенное влияние на дальность
- Антенны маленькие/компактные
- Лучше всего подходит для FPV в дрон-рейсинге
Разъёмы видеопередатчика
Не все видеопередатчики имеют одинаковые разъёмы, поэтому важно знать, какой разъём установлен в выбранной камере, а также, посмотреть, возможно ли подключение и работа с выбранным видеопередатчиком. Самые популярные разъёмы — композитные, мини/микро USB и 0.1-дюймовые разъёмы (аналоговые). На рынке имеется ряд адаптеров/переходников, например: 0.1″ FPV Tx разъём — miniUSB для использования с камерой GoPro, что значительно упрощает использование таких продуктов.
Некоторые видеопередатчики также могут иметь аудиовход, тем не менее в большинстве случаев шум издаваемый силовой установкой будет заглушать любой звук, который вы надеетесь записать. Если вам нужен звук, обязательно расположите микрофон как можно дальше от моторов (потребуется немало испытаний, чтобы найти макс. оптимальное место) и выберите совместимый приёмник.
Антенна видеопередатчика
Видеоприёмник (VRX)
Антенна видеоприёмника
Видеодисплей
ЖК монитор (LCD монитор)
- При рассмотрении ЖК монитора важно знать различие между настольным/компьютерным ЖК монитором или ЖК телевизором и тем, который предназначен быть портативным. Телевизионный/компьютерный монитор почти всегда имеет разъём питания, совместимый со стандартным компьютерным кабелем питания (потребляет переменный ток напрямую), что делает его очень сложным для использования с АКБ. ЖК/OLED дисплей, который должен быть более портативным, зачастую потребляет постоянный ток и требует внешнего трансформатора для подключения к сети (A/C).
- Размер, частота обновления и качество отображения дисплея, используемого для FPV применения варьируются от небольших мониторов с зернистыми изображениями, те что обновляются несколько раз в секунду, до больших дисплеев, которые в сочетании с правильным видеопередатчиком и приёмником, отображают большие HD изображения без каких либо явных задержек. Имейте в виду, что любой выбранный вами 2D-дисплей должен быть подключен к источнику питания и установлен, либо внутри базовой станции БПЛА (описанной ниже), либо посредством крепления FPV монитора на аппаратуре управления.
FPV очки
-
широко используются в FPV из-за их более доступной цены, совместимости с одним источником видеосигнала (с одной видеокамеры) и простоты использования с внешним аккумулятором. Некоторые модели включают в себя видеоприёмник; комплекты приходят с камерой, видеопередатчиком, FPV очками (с встроенным видеоприёмником) и внешним аккумулятором, а также обеими антеннами.
- Качество видео, предлагаемое недорогими FPV очками, может быть довольно низким, поэтому если бюджет имеет значение, примите во внимание, что вы можете получить лучшее впечатление от ЖК-монитора большего размера по той же цене, что и FPV очки.
Отслеживание головы
- Отслеживание головы по существу тоже самое, что и отслеживание движения, а именно, измерение трехмерной ориентации/углов в отличие от линейного движения. Сенсорный комплекс составляют чипы MEMS акселерометра, гироскопов или инерциальных измерительных модулей (IMU). Датчики устанавливаются (или встраиваются) в FPV/VR очки и отправляют данные в микроконтроллер для интерпретации данных датчика в виде углов, который затем отправляет данные, либо посредством аппаратуры управления (для моделей более высокого уровня), либо через отдельное беспроводное передающее устройство. Идеальная система отслеживания головы совместима с передатчиком, таким образом углы могут быть отправлены с помощью передатчика по двум свободным RC каналам.
3D/Виртуальная реальность
- Occulus Rift, Samsung Gear, Morpheus, VR-очки на базе смартфона и множество других 3D/VR-дисплеев с головным креплением могут быть адаптированы для использования с беспилотниками. Несмотря на то, что эти устройства обычно создаются для трёхмерных компьютерных/консольных игр или в качестве альтернативы телевизору, эти устройства изначально совместимы с 3D и зачастую имеют встроенные датчики трекинга головы, становясь всё более интересными для беспилотного FPV сообщества.
Smart устройства
- Смартфоны, планшеты или ноутбуки могут быть использованы для отображения видео в режиме реального времени. Их батареи являются встроенными, а сами устройства лёгкие. Сложность использования интеллектуальных устройств заключается в том, что большинство приёмников не предназначены для приёма видеосигнала от беспроводного видеоприёмника (один из двух проводной или беспроводной). Ноутбук или планшет с встроенной или USB-видеокартой может получать нормальное композитное видео. Смартфон в настоящее время лучше всего работает с видео, отправляемым по Wi-Fi (от Wi-Fi камеры к Wi-Fi адаптеру). Использование Wi-Fi видеосигнала GoPro и мобильного приложения является одним из самых простых способов реализации FPV, однако стоит отметить, что диапазон сигнала Wi-Fi камеры сильно ограничен (10-20 метров). Поскольку смартфоны широко распространены, а беспилотники — последний писк моды, производители регулярно выпускают новые продукты, из которых извлекают выгоду, поэтому прежде чем принять решение, хорошенько подумайте.
Экранное меню (OSD)
- Экранное меню (OSD) позволяет пилоту видеть различные сенсорные данные, отправляемые с дрона. Одним из самых простых способов выведения данных на экран является использование камеры с аналоговым выходом и размещение экранной платы между выходом камеры и видеопередатчиком. Плата OSD адаптера имеет входы для различных сенсоров и будет накладывать данные на видео, таким образом пилот получит видео с уже наложенными данными телеметрии.
Соображения касательно расстояния удаления
- Как вы уже успели заметить, работа на большом расстоянии зависит главным образом от мощности передатчика (аппаратуры управления, а также видео, если применимо). Обычно RC-передатчики включают в себя RF-систему, состоящую из джойстиков и переключателей, электроники и RF-передатчика, и менее дорогих RC-элементов, эта система почти всегда представляет собой единое целое. Модели более высокого уровня часто имеют радиочастотный модуль, который можно заметить в виде коробки, расположенной на тыльной стороне аппаратуры управления. В Северной Америке это также законное требование, чтобы БПЛА оставался в поле зрения пилота (для информации). Тем не менее законы меняются, поэтому лучше проконсультироваться, прежде чем пытаться выполнять беспилотные операции на больших расстояниях.
Питание
БПЛА/Дрон
- Двигатели: большинство двигателей БПЛА среднего размера, как правило, работают при напряжении 11.1В или 14.8В.
- Контроллер полёта, приёмник, GPS: в идеале они должны получать питание от BEC от одного из ESC.
- Приёмник отслеживающий положение головы: он будет также работать от BEC.
- Сервоподвес: Сервоприводная система подвеса может получать питание от одного из BEC на ESC и работать при напряжении 5В.
- BLDC подвес: Некоторые BLDC подвесы могут подключаться к зарядному разъёму основного аккумулятора, в то время как другим может потребоваться определенное напряжение. Проверьте характеристики подвеса, который вы покупаете.
- Камера: Камеры, используемые для FPV полёта, имеют тенденцию работать при 5В (от BEC) или 12В (от основного аккумулятора). Большинство экшн-камер имеют собственную встроенную батарею.
- Видеопередатчик: Большинство работает при 5В и может питаться от BEC.
- Дополнительная электроника (освещение, парашют и т.д.): 5В.
Пилот
Базовая станция
- Основную батарею, возможно, используемую для питания ЖК-монитора и/или FPV очков и, возможно, видеоприёмника.
- Вспомогательную батарею для передатчика и/или видеоприёмника.
- Крепление для ЖК-монитора и/или место для FPV очков.
- Крепление для видеоприёмника.
- Место для хранения аппаратуры управления.
- Крепление для антенны большой дальности (или место для переносной направленной антенны)
- Место для зарядного устройства для основного аккумулятора (ов).
- Место для запасных частей для дрона (пропеллеры, моторы, аккумуляторы, элементы рамы).
Антенный трекер

Антенный трекер — это электромеханическое устройство, которое отслеживает положение дрона в трёхмерном пространстве, используя GPS координаты, и, зная местоположение GPS трекера, направляет антенну в сторону беспилотника. Антенные трекеры обычно используются в дальнобойных миссиях, и на рынке не так много коммерческих продуктов. Трекер состоит из GPS приёмника, компаса (а иногда и IMU), микроконтроллера, приёмника данных (для приёма GPS-координат дрона), одного поворотного и одного наклонного мотора, механической рамы, направленной антенны и аккумуляторной батареи. Чтобы уменьшить отрицательное влияние препятствий, системы антенного трекера поднимаются над землей с помощью штатива.
Читайте также: