
Механизмы чебышева своими руками
Добавил пользователь Алексей Ф. Обновлено: 16.09.2024
Длины звеньев механизма удовлетворяют условиям: AD = АС; DH = ЕС; НК = EF; DK = CF; LK = GF и LB = BG. При вращении кривошипа 1 вокруг неподвижной оси А звено 2 качается вокруг неподвижной оси В. При этом вследствие симметрии размеров звеньев обеспечивается более благоприятное нагружение ведомого звена 2.
Длины звеньев механизма удовлетворяют условиям: АВ = СВ = ВМ = 1; ЕА = 0,545; СЕ = 1,325; β = 80º; MD =1,61; FD = 0,71; FG = 1,33; GH = 1,36; KH = 0,39; CF = 1,6; EF = 2,6; KF = 2,11; CK = 3,29. Точка М звена 2 шарнирного четырехзвенного механизма EABC описывает шатунную кривую а — а с точкой самопересечения, совпадающей с точкой С. Звено 3 входит во вращательные пары М и D со звеньями 2 и 4. Звено 4 совершает качательное движение вокруг неподвижной оси F. Звено 5 входит во вращательные пары G и Н со звеньями 4 и 6. Звено 6 жестко связано с маховиком b и вращается вокруг неподвижной оси K. При указанных размерах механизма полному качанию звена 2 соответствует один оборот звена 6. Маховик b обеспечивает вывод механизма из предельных положений, если ведущим звеном будет звено 1.
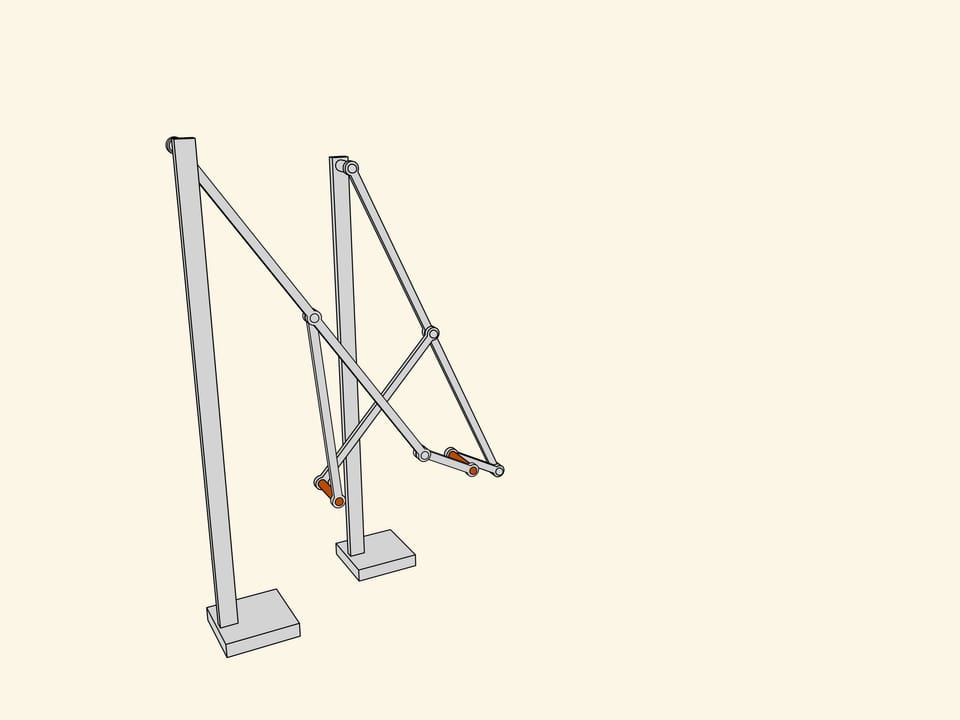
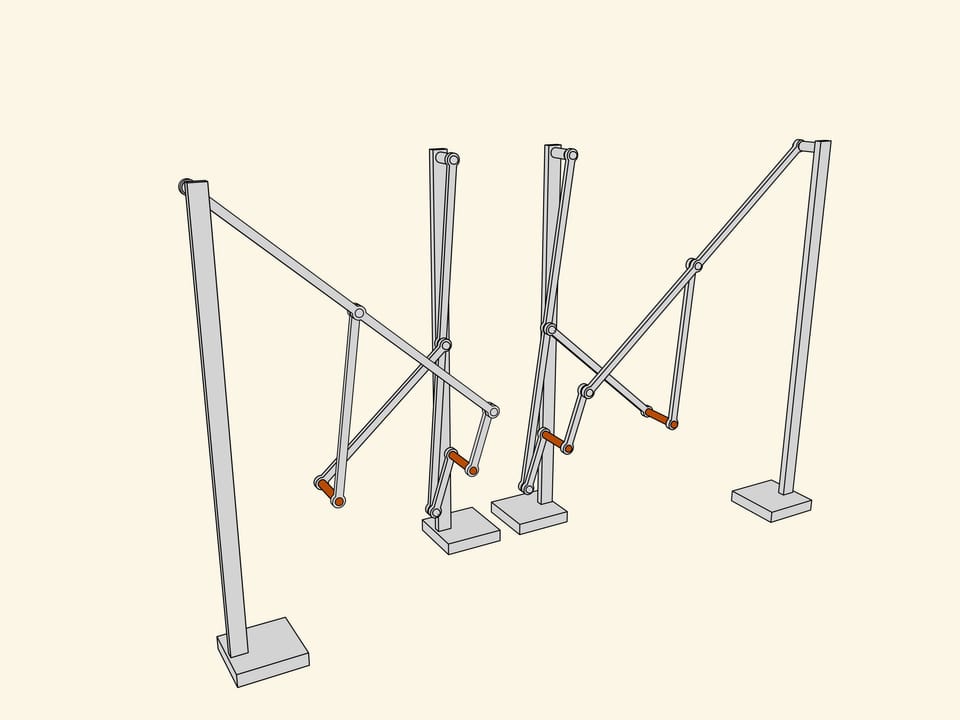
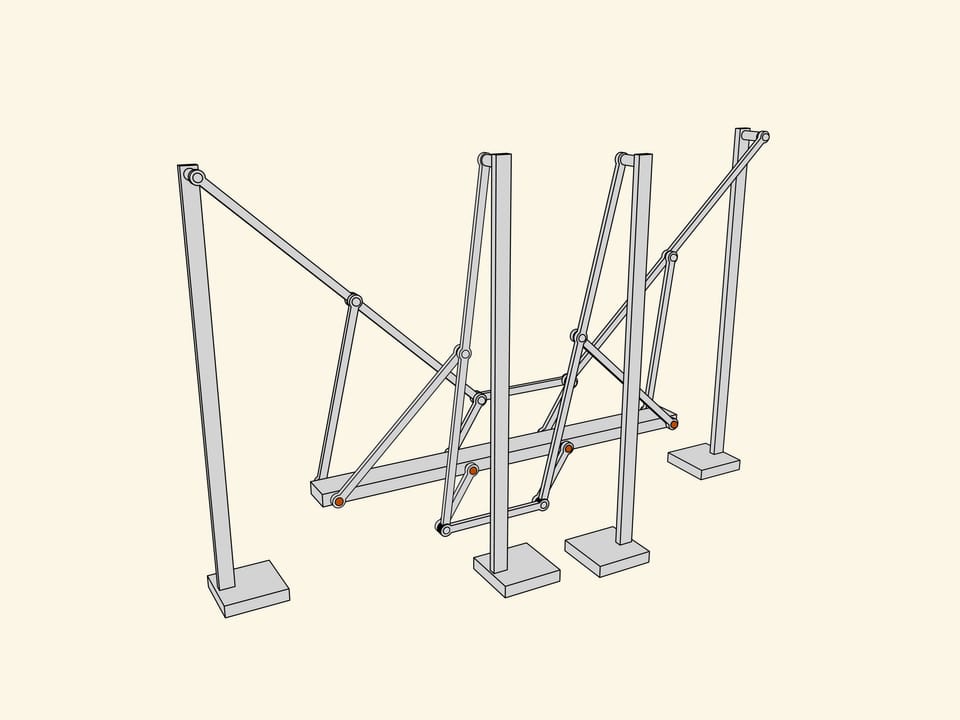
Длины звеньев механизма удовлетворяют условиям: AB = CB = BM = A1B1 = B1C1 = B1M1 = 1; С'А = 0,297; СС' = 0,765; С1С1' = 1,21; β = 280°; MM1 = 1,275; СС1' = 0,74; С'С1'= 1,335; СС1=1,3. Механизм образован двумя симметрично расположенными кинематическими цепями, приводимыми в движение кривошипом 1. Точка М шатуна 2 описывает шатунную кривую, участок которой близок к прямой. Точка К звена 3, соединяющего точки М и М1 шатунов 2 и 4 механизмов C'ABC и C1'A1B1C1, описывает также траекторию, участок которой близок к прямой. Вследствие этого все точки весла 6 описывают траектории а — а, во время движения по которым весло входит в воду, движется в воде и выходит из нее.
В основе механизма лежит двухкривошипный шарнирный четырехзвенник ABCD, состоящий из звеньев 1, 2 и 3. Тройной кривошип 1 вращается вокруг неподвижной оси А. Кривошип 2 имеет кольцо b, охватывающее диск а. К кривошипу 1 и кольцу b присоединены звенья 4, 5, 6 и 7. Звенья 3, 4 и 6 несут гребные лопатки с, плоскости которых перпендикулярны к осям этих звеньев.
Педали 2 и 3 вращаются вокруг неподвижной оси А и тягами 5 и 6 передают движение на кривошип 1, вращающийся вокруг неподвижной оси В. С кривошипом 1 в точке С входит во вращательную пару звено 7, шарнирно связанное с пластинчатой пружиной 4, закрепленной в точке D. Кривошип 1 приводится во вращение попеременным нажатием на педали 2 и 3. Пружина 4 служит для силового замыкания механизма.
Механизм состоит из двух ведущих кривошипов 1 и 2, которыми приводятся в качательное движение вокруг осей А и В звенья 3, 4, 5 и 6 посредством промежуточных звеньев 7, 8, 9, 10, 11, 12, 13 и 14. В точках С, D, Е и F по две вращательные пары.
Кривошип 1 вращается вокруг неподвижной оси Е и промежуточным звеном 5, входящим во вращательную пару F с шатуном 6 шарнирного четырехзвенника ABCD, приводит в движение ведомое звено 2. Ось вращения А звена 7 находится на звене 4, вращающемся вокруг неподвижной оси K. Со звеном 4 жестко связан сектор а червячного колеса, находящийся в зацеплении с червяком b звена 3. При вращении кривошипа 1 ведомое звено 2 совершает качательное движение. Угол поворота звена 2 может регулироваться посредством червяка b и червячного сектора а, которые меняют положение шарнира А. Регулировка может совершаться в процессе работы.
Коромысло 4 шарнирного четырехзвенника DCBA вращается вокруг неподвижной оси А. Ведомое звено 2 приводится в качательное движение посредством промежуточного звена 5, входящего во вращательные пары В и Е со звеньями 4 и 2. Ось вращения А звена 4 находится на звене 6, вращающемся вокруг неподвижной оси G. Звено 6 выполнено в виде кулисы а, по которой скользит палец b гайки 7, входящей в винтовую пару с винтом 3. При вращении кривошипа 1 ведомое звено 2 совершает качательное движение. Угол поворота звена 2 регулируется изменением положения оси А посредством винта 3. Регулировка может совершаться в процессе работы.
Длины звеньев механизма удовлетворяют условиям: GF = BD; FE = CD; ЕА = CA. Если оси вращения G, A и В находятся на одной прямой и удовлетворяется условие GA = АВ, то вследствие симметрии в расположении и равенства длин звеньев механизма при вращении кривошипа 1 кривошип 2 вращается в том же направлении и с тем же числом оборотов в минуту, как и кривошип 1. Ось вращения А принадлежит ползуну 9, скользящему в неподвижной направляющей а. Ось Вращения В принадлежит ползуну 8, скользящему в неподвижной направляющей b. Положение осей А и В может меняться посредством кулисно-рычажного механизма, состоящего из звеньев 9, 3, 4, 5, 6, 7, 8. Различные положения осей А и В фиксируются путем специальных прижимных устройств, не показанных на чертеже, прижимающих ползуны 8 и 9 к их направляющим b и а.
В основе механизма лежит двухкоромысловый шарнирный четырехзвенник ABCD, состоящий из звеньев 1, 2 и 4, у которого шарнир В выполнен в виде неподвижного диска 5, охватываемого расширенной втулкой 4. Со звеном 2 жестко связана шпора а. Со втулкой 4 входят во вращательные пары звенья 3, которые в свою очередь входят во вращательные пары со звеньями 2. При вращении звена 1 звенья 2 совершают сложные движения, при этом шпоры принимают вертикальные положения через каждые полоборота звена 1, в нижнем положении звена 2.
Основу механизма составляет четырехзвенный шарнирный механизм ABCD с ведущим эксцентриком 1, вращающимся вокруг неподвижной оси А. Звено 2 имеет расширенную втулку b, охватывающую эксцентрик 1. Конец звена 3 представляет собой шпору колеса. Остальные шпоры принадлежат дополнительным звеньям, присоединенным к звену 2 и ободу 4. При качении колеса по грунту шпоры периодически выдвигаются наружу из обода 4.
Звено 1 вращается вокруг неподвижной оси А и входит во вращательную пару С со звеном 2, входящим во вращательную пару D со звеном 3. Звено 4 входит во вращательную пару Е со звеном 3 и вращательную пару F со звеном 5, которое входит во вращательную пару G со звеном 6, вращающимся вокруг неподвижной оси В. Механизм осуществляет передачу вращения между произвольно расположенными осями А и В.
Длины звеньев 1, 2 и 3 равны соответственно длинам звеньев 6, 5 и 4. Звено 1 вращается вокруг неподвижной оси А и входит во вращательную пару С со звеном 2, входящим во вращательную пару D со звеном 3. Звено 6 вращается вокруг неподвижной оси В и входит во вращательную пару G со звеном 5. Звено 4 входит во вращательные пары Е и F со звеньями 3 и 5. Механизм осуществляет передачу вращения между двумя произвольно расположенными осями А и В.
Со времён изобретения Джеймсом Уаттом паровой машины стояла задача построения шарнирного механизма, переводящего движение по окружности в прямолинейное движение.
Великий русский математик Пафнутий Львович Чебышев не смог точно решить изначальную задачу, однако, исследуя её, разработал теорию приближения функций и теорию синтеза механизмов. Используя последнюю, он подобрал размеры лямбда-механизма так, чтобы… Но об этом чуть позже.
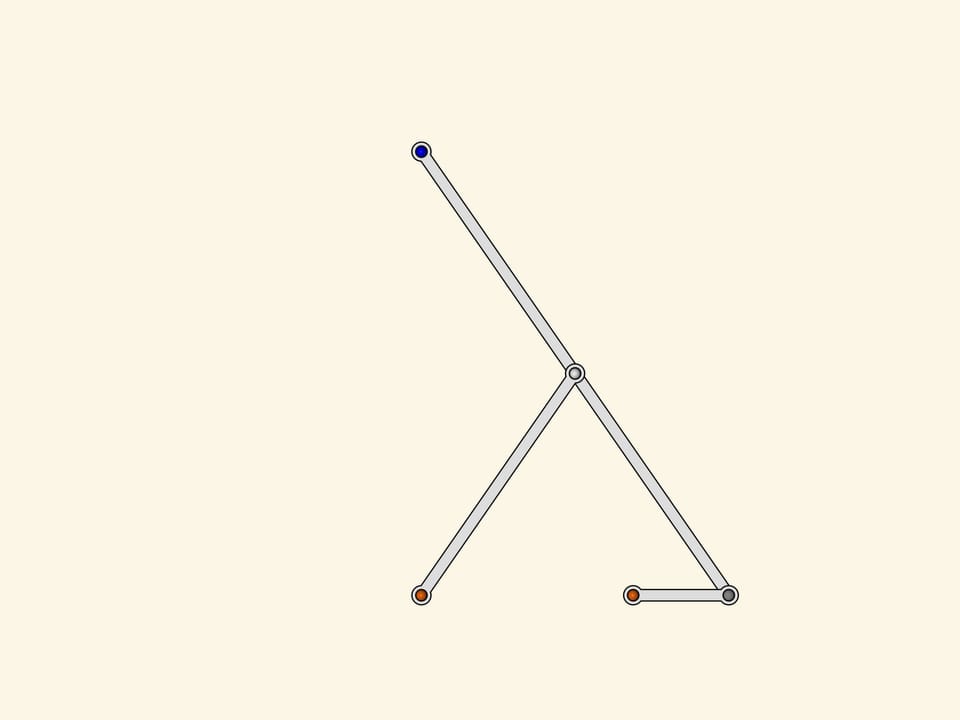
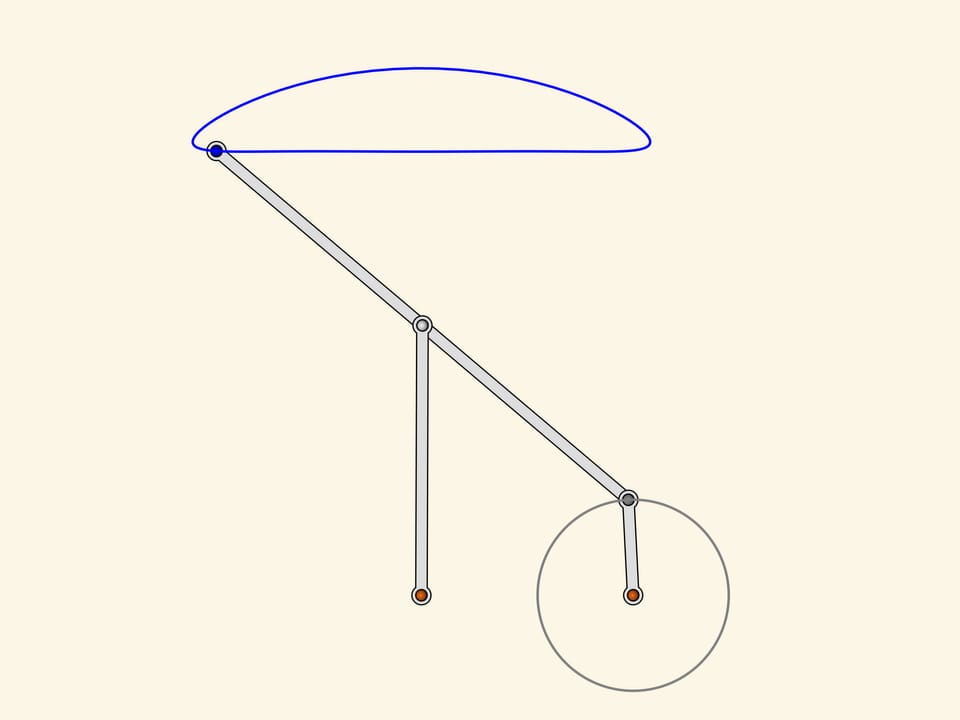
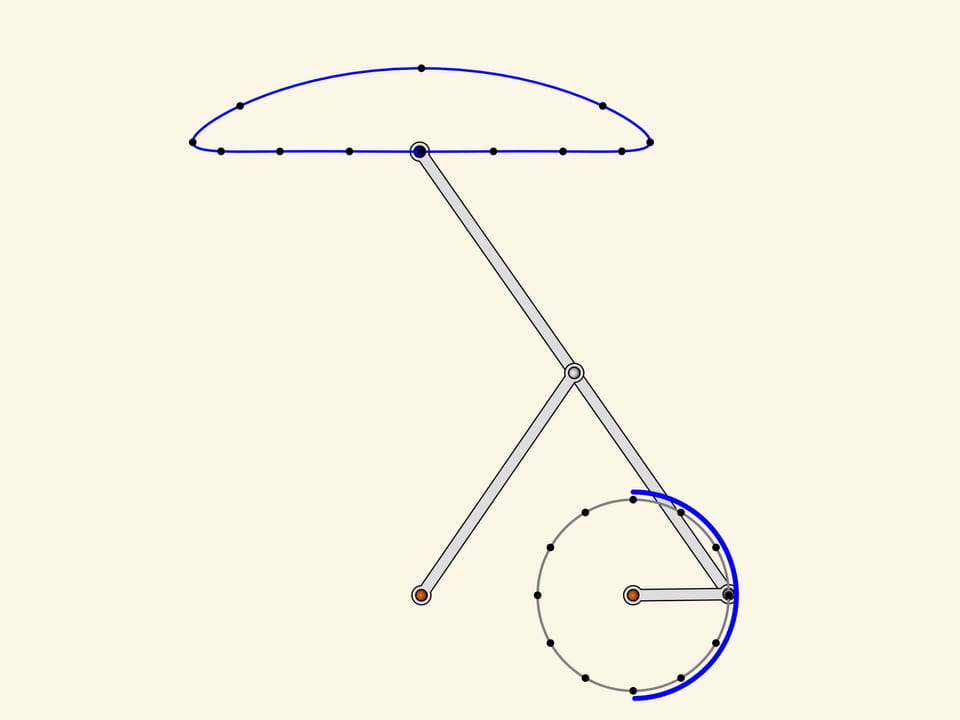
Расставим на окружности, по которой равномерно вращается ведущий шарнир, метки через равные промежутки времени и соответствующие им метки на траектории свободного шарнира.
На что же ещё, кроме шляпки гриба, похожа синяя траектория? Пафнутий Львович увидел сходство с траекторией движения копыта лошади!
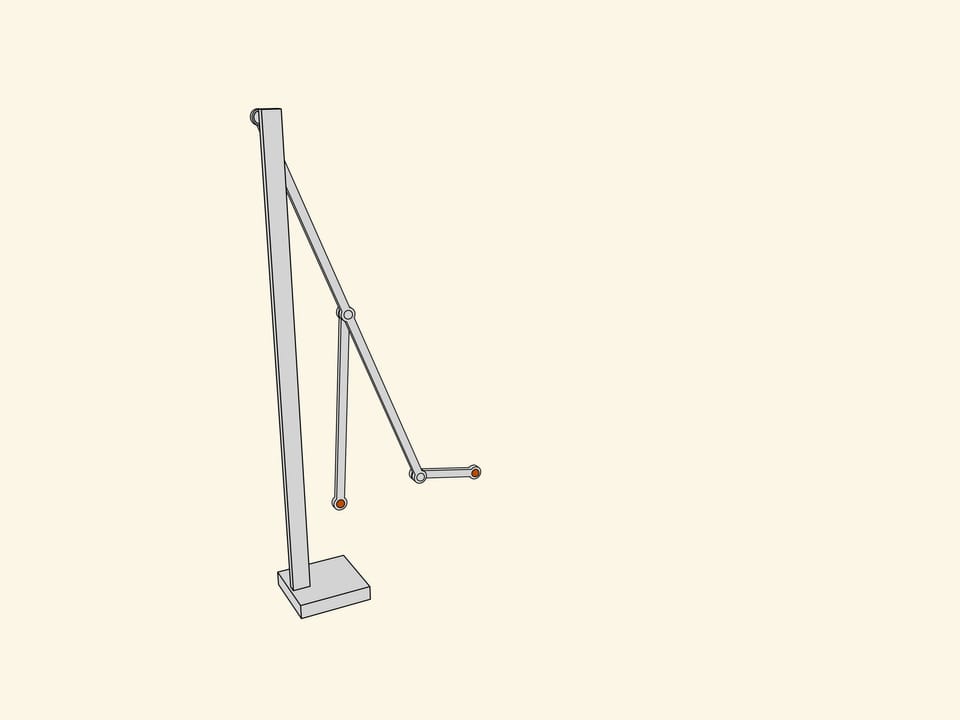
В данной работе ребята соберут шагающего робота на основе конструкции, придуманной великим русским математиком и изобретателем 19 века Пафнутием Чебышёвым, познакомятся с биографией ученого, узнают о такой штуке, как лямбда-механизм и как он используется для преобразования вращательного движения от мотора в поступательное движение машины.
Оборудование: 2 базовых набора Lego Mindstorms Education EV3 или 1 базовый + 1 расширенный набор.
Механизмы: лямбда-механизм Чебышёва.
Описание. Великий русский математик, основоположник петербургской математической школы, академик Петербургской академии наук и 24 академий мира, Пафнутий Львович Чебышёв (1821-1894) оригинальным образом подошел к проблеме преобразования вращательно движения по окружности (например, от парового двигателя) в поступательное движение машины.

Задачи:
- Ознакомьтесь с биографией русского математика и механика Пафнутия Чебышёва.
- Изучите работу стопоходящей машины на примере анимированной 3D-модели.
- Соберите модель стопоходящей машины по инструкции, используя образовательный конструктор Lego EV3.
Чтобы скачать файлы, вы должны зарегистрироваться или войти на сайт, а также иметь платный аккаунт доступа. Если у вас есть действующий аккаунт доступа, ниже увидите кнопку для загрузки.
Математик, механик, педагог; доктор математики и астрономии; основатель и глава Петербургской математической школы, породившей, в свою очередь, русские математические школы — в теории вероятностей, теории чисел, теории приближения функций, теории механизмов; профессор Петербургского университета, академик Петербургской АН, почетный член всех российских университетов, член 25 академий и научных обществ мира; член Ученого комитета Министерства просвещения, рецензент учебников, составитель программы и инструкций для начальных и средних школ; кавалер Командорского креста Почетного легиона, лауреат Демидовской премии Петербургской АН; действительный тайный советник — Пафнутий Львович Чебышёв (1821—1894) является автором классических работ в механике, геометрии, баллистике, теории механизмов. Бесценен вклад ученого в интегральное исчисление, теорию вероятностей, теорию чисел. Чебышёв — основоположник теории приближения функций.
Что характерно, среди панегиристов были и чистые математики-аналисты, и математики-прикладники, и геометры и техники. Практически во всех областях механики и математики Чебышёв получил фундаментальные результаты, выдвинул столько новых идей и методов, и так далеко определил развитие этих ветвей науки, что они и по сей день сохранили свое значение.
40 лет Чебышёв сотрудничал с военным артиллерийским ведомством, для которого выполнил ряд блестящих работ по усовершенствованию дальнобойности и точности артиллерийской стрельбы.
Одних только названий классических математических соотношений, связанных с именем математика, не один десяток: многочлены Чебышёва, неравенства, множество, система функций, фильтр, механизм, функции пси и тета, сеть, формула, полиномы и т.д.
Нельзя не упомянуть и о предложении Чебышёва Петербургской АН — избрать членом-корреспондентом С.В. Ковалевскую, а также о его учениках — А.М. Ляпунове, А.А. Маркове, В.А. Стеклове, Д.А. Граве, Г.Ф. Вороном, А.Н. Коркине, Е.И. Золотареве. Будущие академики и главы других математических школ завершили проработки и идеи учителя — по теории фигур равновесия вращающейся жидкости, по теории цепей и т.д.
Пафнутий Львович любые теоретические проблемы математики старался увязать с практической деятельностью людей. Не раз подчеркивая, что в любом деле надо по возможности добиваться как можно большей выгоды, Чебышёв свои математические открытия совершил при решении прикладных задач. Более того, теории механизмов и машин ученый отдал едва ли не треть своей жизни. Глубокие теоретические изыскания в этой области математик успешно сочетал с конструированием конкретных механизмов.
Многочисленные работы Чебышёва посвятил синтезу шарнирных механизмов, в частности параллелограмму Уатта, изучение которого натолкнуло математика на постановку задачи о наилучшем приближении функций.
Решив эту задачу, Чебышёв создал механизмы, в которых криволинейное движение свел к недостижимому ранее — прямолинейному (в некотором приближении), что вывело конструирование шарниров на принципиально новый уровень, а сами шарниры сделало значительно долговечнее.
Всего ученый создал 41 оригинальный механизм и 40 их модификаций. Многие из них применяются ныне в современном автомато- и приборостроении.
Закончить очерк хочется теми же словами, которыми и начал его — России есть кем и есть чем гордиться, пока в ней есть такие люди, как П.Л. Чебышёв и созданная им русская школа математики.
Читайте также: