
Машинка из гироскутера своими руками
Добавил пользователь Евгений Кузнецов Обновлено: 19.09.2024
В этом видео я покажу, как я сделал электросамокат из обычного самоката и колеса от гироскутера! Вторая часть видео: .
Здорова. В этом видео я сделаю трайк используя мотор колёса и контроллер от гироскутера. Контроллер перепрошит на .
вам надоел жужжащий триммер? тогда это видео для вас! сделать газонокосилку дома очень просто! Но сделать .
Моя вторая прошивка где два режима работы, с накатом и с электронным тормозом, можно менять без перепрошивки.
Электросамокат с колесами от машины. Наш ответ citycoco) автоколеса. Самые большие колеса на электросамокат.
Установка тормозного диска на мотор колесо гироскутера. Один из возможных универсальных вариантов, позволяющих .
Первый опыт постройки электро снегоката своими руками. Первые тесты, выводы, недостатки и как НЕ нужно делать .
Привет сегодня вы видели как мы сделали обзор на нашу самодельную машину! Посчитай сколько я раз сказал слово , .
Следующие проекты: Сделать лодочный мотор. Поставить гироскутер на гусеницы. Стационарный сверлильный станок.
Всем привет! В этом видео я покажу и расскажу вам, как сделать мини электробайк из гироскутера и старого велосипеда.
Еще одна модификация прошивки от EFeru доработанная под режим с выбором 4 скоростей. Управление с ручек газа и .
Электровелосипед своими руками! Электровелосипед с мотор колесом от гироскутера. Как электрифицировать велосипед .
Сделал ребенку трайк из гироскутера и трехколесного велосипеда. При желании за пару минут гироскутер можно .
Я собираю тренажер-электростанцию, снял вольт-амперную характеристику. В качестве генератора возьму мотор-колесо .
Электроскейт из гироскутера с компенсатором обратного угла наклона. Мощность 1400ватт, 4 стандартных аккума.
Дешёвое всегда не лучшего качества. История о некачественных аккумуляторах в недорогих гироскутерах. Здесь магазин .
Первый собранный мной детский электровелосипед успешно работал от 12вольт,позже был сделан самокат для ребенка .
Два мотор колеса от героскутера, два контроллера ,АКБ SAMSUNG 36v/4.4ah, ручка газа с индикатором напряжения,и .
Гибридный полноприводный карт из гироскутера. Как подключить и запустить колесо от гироскутера, покажем в .
Мотор - гироскутер 350w. Максималка 19 км/ч. Запас хода 6км. Это на 36в и 4,4 ah. Думаю перейти на 48в. и есть ещё АКБ .
всем привет сегодня продолжение про мотор для лодки , и как обещал сегодня попробуем взять bldc мотор , и посмотрим .
Начало и уже испытания будущего 4WD грузопассажирского миниавтомобильчика. Пока с одним задействованным .
Всем привет! В этом видео я покажу и расскажу вам как сделать электросамокат своими руками из гироскутера и рамы от .
Город Железнодорожный, округ Балашиха, у одного села батарейка, второй его тянет "на тросу" )) Что бы запустить .

Самокаты
Электросамокат с колесом от гироскутера
Одним из популярных вариантов переделки гироскутера является создание на его основе самоходного самоката. Такой агрегат не требует столь же высокой способности удерживать равновесие, в этом отношении он даже легче велосипеда, поэтому и пользуется спросом.

Следует пояснить, что в большинстве случаев для производства электрического самоката необходим обычный самокат — именно он станет основой для будущего агрегата.
От самого гироскутера используется только мотор-колесо — в идеале оно должно быть того же диаметра, что и самокат. Эксперты советуют сначала сделать заднюю вилку для ведущего колеса из дерева или картона — так вы сразу сможете увидеть свою ошибку. И вы сделаете полную деталь, из надежной квадратной трубы, по заранее проверенному образцу.

После резки, сварки и шлифовки металлической вилки вы прикрепляете к ней кронштейн с помощью болтов и гаек. В то же время необходимо подать напряжение на бесщеточный двигатель — без контроллера самокат останется обычным, а не электрическим. Что касается мощности, то контроллер должен быть согласован с двигателем. Чаще всего он устанавливается на задней вилке, что означает необходимость прокладки проводов вдоль рамы к ручке газа, причем провода обычно крепятся с помощью пластиковых разъемов. Разъем для подключения зарядного устройства должен быть встроен в систему в удобном месте.

Литиевые батареи будут поддерживать заряд электросамоката и могут быть установлены параллельно или последовательно. Перезарядка чревата, в лучшем случае, быстрым разрушением батарей, поэтому следует дополнительно установить контроллер BMS — он не позволит превысить емкость.

Собранную конструкцию следует тщательно проверить в комнатных условиях, защитив ее от грязи и пыли. Если полученный самокат работает исправно, и к нему нет никаких претензий, необходимо позаботиться о защите основных компонентов от грязи и влаги. Крышку лучше всего изготовить из алюминиевого листа толщиной 2 мм по шаблону, заранее сформированному на картоне. Чтобы не испортить дизайн устройства, перед установкой на саморезы крышка окрашивается в цвет, логично сочетающийся с цветовой гаммой автомобиля.

2 вариант
Его вполне достаточно, чтобы сделать самокат из поврежденного гироскутера. Такое устройство будет выглядеть весьма эстетично. Кроме того, он будет обладать хорошими техническими характеристиками.

Схема изготовления электросамоката из гироскутера следующая:
- Если мы используем раму от готового самоката, то под колесо от гироскутера сделаем вилку для крепления заднего колеса. Если мы делаем раму сами, мы берем на себя крепление;
- Возьмите одно мотор-колесо от гироскутера;
- Установите ручку акселератора и кнопку питания.
- Установите батарейный блок;
- Установите контроллер двигателя;

После установки всех частей и компонентов проверьте работу и используйте по своему усмотрению.

Делаем Самокат с электроприводом из старого гироскутера по шагам
Используемые материалы и инструменты:
— Старый гироскутер (вам понадобится мотор-колесо);
— контроллер бесщеточного двигателя;
— стальные квадратные трубы;
— контроллер батареи; и многое другое.
— измерительный инструмент и многое другое.
Процесс изготовления электрического самоката:
Шаг первый. Мы готовим материалы
Прежде всего, необходимо разобрать гироскутер. Нам нужно от него одно колесо, точнее, мотор-колесо. Автор имеет мотор-колесо мощностью 350 Вт, его диаметр составляет 20 см. То есть, размеры колес самоката абсолютно одинаковы.
Шаг 7. Батарейный блок
В качестве источника питания автор использовал литиевые батареи. Соедините их последовательно или параллельно, чтобы получить желаемое напряжение. Помните, что такая батарея должна иметь защиту от перезаряда, такой регулятор называется BMS. Если заряжать аккумулятор без него, он перезарядится и разрушится, в некоторых случаях взорвется или даже воспламенится. Кроме того, такие батареи боятся глубокого разряда, а для этого нужен соответствующий контроллер.
Если необходимо соединить определенное количество ячеек, для этой цели удобно использовать точечную сварку.
В результате автор изготовил батарейный блок, который стало удобно устанавливать на раму самоката.
Общие принципы переделки самоката из гироскутера
Помните об основных принципах преобразования одного устройства в другое. Перед началом производственного процесса необходимо выбрать основное устройство для обработки. Опытные мастера рекомендуют использовать гироскутер. Есть и другие варианты, но этот — лучший.
Новичкам рекомендуется попробовать сделать самокат из обычной отвертки. Он считается базовым устройством. Для передачи крутящего момента необходима цепь. Его установка и обслуживание не вызывают никаких трудностей. Существуют и альтернативные решения. Наиболее распространенными являются жесткие звездочки, шестерни и фрикционные головки.
При креплении колес следует помнить, что одно из них должно быть ведущим. Если предпочтение отдается переднему, машиной будет легче управлять. С ведущим задним колесом сборка будет проще.
Чтобы сделать самокат самостоятельно, необходимо изготовить прочную раму. Лучше всего изготавливать его из стальных труб. Их толщина составляет около 2,5 мм. Этого достаточно для максимальной нагрузки в 100 кг. Если вы хотите увеличить его, следует использовать трубы с более толстыми стенками.
В качестве источника питания можно использовать литиевую батарею. Оригинальный аккумулятор также будет работать, если вы сделаете самокат из шуруповерта. Хорошей заменой будут батарейки от современных игрушек.
Прошивка платы надоевшего гироскутера под ручку (педаль) газа открывает новые возможности для самодельщиков электротранспорта. Гироскутер (ховерборд) является отличным недорогим донором для изготовления электротранспорта своими руками. На основе запчастей гироскутера можно собрать электросамокат, трайк, детский четырехколесный автомобиль, багги, самоходную тележку и другие двух (и более) колесные полезные и интересные самоделки.
Некоторые самоделки Вы можете посмотреть в этом видео.
Второе условие – плата контроллера обязательно должна быть с чипом STM32F103RCT6, GD32F103RCT6, CS32F103RCT6 (символы после не имеют значения). Работа прошивки с другими чипами не поддерживается.
Что понадобится для прошивки
Программатор ST-Link
Программатор ST-Link V2 доставка из Китая / доставка из РФ, стоимость из китая около 400 руб. Все необходимые провода для подключения будут в комплекте. Подключается в USB порт ПК и тремя проводами к плате гироскутера.
Утилита для программатора STM32 ST-LINK Utility
Скачиваем с официального сайта актуальную версию. Нужно будет принять пользовательское соглашение и указать действующий адрес электронной почты. На него придет письмо со ссылкой на скачивание утилиты.
При установке всё предельно просто, и проблем возникнуть не должно.
Интерфейс утилиты выглядит следующим образом:
Драйвера для программатора ST-Link V2
Распаковываем архив и от имени администратора запускаем dpinst_amd64 (для х64) или dpinst_x86 (для х32) в зависимости от разрядности операционной системы. Разрядность можно посмотреть – Мой компьютер – свойства, (тип системы)
Исходник прошивки
Исходник прошивки (проект) прямая ссылка скачиваем, извлекаем из архива и сохраняем. Его будем настраивать.
Программа Visual Studio
Программа Visual Studio позволит настроить прошивку нужным нам образом и создать BIN-файл, который мы и будем заливать в микроконтроллер с помощью программатора. Для скачивания Visual Studio нужно будет зарегистрироваться на сайте. В процессе установки необходимо соглашаться на все разрешения для программы.
После запуска необходимо установить дополнение PlatformIO IDE. Копируем название, жмем на значок в левом меню, вставляем в поле поиска, выбираем из списка и жмем Install. После завершения установки и автоматических обновлений (это может занять немало времени и она подгузит еще несколько нужных дополнений сама) программа готова к работе.
В некоторых случаях потребуется дополнительно установить Python. На свой компьютер я его не устанавливал, так как всё работает и без него. У некоторых пользователей без него работать не получается.
Также при неполадках с программой иногда помогает её запуск через “Исправление неполадок совместимости” (жмем на иконку программы правой кнопкой мыши, из меню выбираем эту функцию) экспериментируем с различными вариантами.
Настройка прошивки
В исходном состоянии прошивка не готова к заливке в контроллер и её нужно подготовить. Все скриншоты сделаны после редактирования настроек под ту конфигурацию, которая была необходима мне для электросамоката. В ней оба колеса вращаются в одном направлении, максимальный ток на один мотор 15А. Для своих нужд Вы можете экспериментировать с настройками.
Открываем в программе Visual Studio папку с проектом (исходником прошивки). Жмем иконку Explorer – File – Open Folder и выбираем папку с проектом. Необходимо выбрать именно конечную папку с этим названием, иначе прошивка может не компилироваться (собираться).
Выбор режима управления
Открываем в левом меню пункт platformio.ini. Здесь мы видим список возможных вариантов управления. Для управления ручкой газа служит вариант HOVERCAR. Для его активации нужно раскомментировать строку default_envs = VARIANT_HOVERCAR; Variant for HOVERCAR build, для этого убираем знак ; в начале строки.
Далее в левом меню выбираем Inc – config.h, открывается код, в котором проводим необходимые настройки.
Настройка батареи
Так как исходник проекта периодически обновляется, у Вас номера строк могут отличаться от тех, что я привожу в скриншотах, но по тексту их легко найти. Вы можете воспользоваться переводчиком, чтобы понять за что отвечают строки, я приведу описание только понятных мне.
Настройки батареи (строки 63-82).
Эта настройка нужна для того чтобы научить контроллер правильно измерять напряжение батареи. При вводе неправильного значения в BAT_CALIB_REAL_VOLTAGE возможно преждевременное отключение контроллера, отключение сразу после запуска.
При использовании 10S литий ионной батареи допускается её разряд до 30 В. Поэтому значения BAT_LVL2, BAT_LVL1 и BAT_DEAD целесообразнее установить 340, 320 и 300 соответственно.
Отключение/включение моторов
138 // Enable/Disable Motor
Типы управления и методы контроля
Для самокатов, машинок и других проектов с водителем лучше подходит FOC_CTRL в сочетании с TRQ_MODE (управление моментом). При этом управление наиболее мягкое, высокая энергоэффективность, свободный накат при сбросе газа.
Также в разделе ховеркар (ищите ниже)
Ограничение тока и оборотов
В зависимости от используемых моторов можно отрегулировать максимальный вливаемый в них ток. Для своих 250 Вт моторов я оставил ток по умолчанию 15А. На практике любая плата выдерживает продолжительный ток 20 А (потребуется улучшить охлаждение), более высокий ток на ваш страх и риск.
define I_MOT_MAX 15 – максимальный ток одного мотора, А
define I_DC_MAX 17 – ставим на 2 Ампера больше как рекомендует автор
define N_MOT_MAX 1000 – ограничение максимальнх оборотов, об/мин
Если Вы хотите понизить максимальные обороты, например для безопасности при эксплуатации транспортного средства детьми, уменьшите define N_MOT_MAX экспериментально подобрав это значение для своих моторов. При этом ослабление поля из следующего пункта настроек обязательно должно быть отключено.
Ослабление поля/опережение фазы
Ослабление поля позволяет раскручивать мотор на бОльшие обороты без увеличения напряжения батареи. При этом если силы моторов хватает для ускорения под нагрузкой, они раскрутятся. Также увеличится и расход батареи. Если при резком сбросе газа после разгона до повышенной скорости моторы будут притормаживать до замедления до некой промежуточной скорости, установите в FIELD_WEAK_HI и N_MOT_MAX значение 1600.
// Field Weakening / Phase Advance
153 define FIELD_WEAK_ENA 1 – Включение ослабления поля / опережения фазы: 0 = отключено (по умолчанию), 1 = включено
154 define FIELD_WEAK_MAX 6 – Максимальный ток ослабления поля, чем больше тем выше возможная скорость (максимум 10)
156 define FIELD_WEAK_HI 1000 // (1000, 1500] – Верхний порог для ограничения оборотов, ставим 1600 если наблюдается глюк при сбросе газа как описано выше
157 define FIELD_WEAK_LO 750 // ( 500, 1000] – Нижний порог для начала ослабления поля, рекомендуется оставить 750
Направление вращения моторов
Раскомментировать для активации. По умолчанию моторы вращаются как если бы они стояли на гироскутере и он катился вперед. На скриншоте инвертирован правый мотор, при этом оба мотора (если смотреть со стороны оси) вращаются по часовой стрелке.
Формирование файла прошивки
После завершения настройки нужно нажать галочку внизу. Программа проверит код на ошибки и при их отсутствии сохранит редактированный нами файл прошивки в папку с проектом по адресу hoverboard-firmware-hack-FOC-masterhoverboard / firmware-hack-FOC-master / .pio / build / VARIANT_HOVERCAR / firmware.BIN. Его мы и будем заливать в чип платы гироскутера.
Если возникают ошибки, проверяем визуально не поставили-ли чего лишнего или не удалили-ли что то нужное. Галочка запуска компиляции может отсутствовать если идет обновление компонентов Visual Studio.
Также замечены похожие платы, но немного с другой разводкой. Они встречаются очень редко, но всё же они есть. После прошивки зуммер не издает звуков – возможно у Вас такая плата. В послендем обновлении исходника появилась и эта версия. В config.h строки 61…66 выбираем вариант 0 – (подходит большинство плат), вариант 1 – второй, более редкий тип плат.
Примеры готовых прошивок
Если у Вас не получается скомпилировать прошивку со своими настройками, я оставлю примеры готовых файлов прошивки.
- направление вращения моторов для самоката. Инвертирован правый мотор (оба мотора вращаются по часовой стрелке, если смотреть со стороны оси)
- максимальный ток на мотор 15 А (17 А макс) не используйте гироскутерную батарею для такого тока!
- ослабление поля 0
- напряжение батареи на момент прошивки 36,00 В
- без ограничения оборотов (при напряжении батареи 36 В большинство моторколес без нагрузки будет иметь около 450 об/мин)
- направление вращения моторов для трайка
- максимальный ток на мотор (детский вариант) 7 А (9 А макс), такой ток не должен повредить большинство исправных гироскутерных батарей 10S 2P
- ослабление поля 0
- напряжение батареи на момент прошивки 36,00 В
- без ограничения оборотов (при напряжении батареи 36 В большинство моторколес без нагрузки будет иметь около 450 об/мин)
Подключение программатора к плате
Программатор ST-Link V2 подключается выводами SWDIO, GND и SWCLK к соответствующим точкам на плате, как показано на рисунке ниже. Чип будет брать питание от родной гироскутерной батареи, поэтому вывод +3,3 V подключать не нужно. Убедитесь что батарея достаточно заряжена и питание не пропадет в момент прошивки.
При прошивке должны быть подключены:
- батарея гироскутера
- кнопка включения гироскутера
- программатор
Процесс прошивки
- Запускаем STM32 ST-LINK Utility
- зажимаем и удерживаем кнопку включения гироскутера в течение всего процесса
- для подключения к чипу жмем Target – Connect (альтернатива – иконка серой вилки на панели управления)
Появившееся предупреждение Can not read memory!… Означает, что чтение родной прошивки недоступно, так как она защищена от чтения.
Придется её стереть. Внимание. После стирания её невозможно будет восстановить.
Снимаем защиту от перезаписи
После завершения этой манипуляции получаем чистый чип
Теперь выбираем файл своей прошивки
Напоминаю, что по умолчанию после настроек в Visual Studio файл прошивки будет находиться по пути hoverboard-firmware-hack-FOC-masterhoverboard / firmware-hack-FOC-master / .pio / buildVARIANT_HOVERCAR / firmware.BIN.
Я создал несколько вариантов прошивок с разными настройками и поэтому выбираю из своей папки.
После удачного завершения процесса в нижнем окне увидим Verifycation…OK и Programmed Memory Checksum: ******
Если у Вас что-то идет не так, проверьте внимательно по скриншотам наличие галочек, и прочих настроек, где они присутствуют на каждом этапе.
При последующих заливках прошивки обязательно предварительно стирайте чип кнопкой Full chip erase, иначе фрагменты старого кода будут мешать работе нового!
Подключение ручки газа и тормоза
В качестве ручки газа можно использовать велосипедные или самокатные газульки с датчиком Холла, педали, либо обычные потенциометры. Подключение по трем проводам, как на схеме внизу. Цвета проводов на платах гироскутеров могут отличаться от приведенного примера, поэтому ориентируемся по расположению точек (пинов) на плате.
Всвязи с тем, что обычно ручки управления выносятся далеко от платы, в проводах могут наводиться помехи, что может вызывать нестабильную работу и ложные срабатывания. Для подавления этих помех следует повесить между сигнальными входами и GND конденсаторы ёмкостью 0,03…0,1 мкФ и резисторы сопротивлением 1…10 кОм, лучше сделать это как можно ближе к плате.
Тормоз может не подключаться вообще, если он не нужен и в Вашей конструкции предусмотрены механические тормоза. На практике он отлично работает и в своём самодельном самокате я использую его и не стал заморачиваться с механическими. Но повесить на него резистор и конденсатор нужно обязательно! И при калибровке (о ней будет ниже) нужно показать вход тормоза сымитировав нажатие кнопки (синий провод на +3,3 В).
При срабатывании на скорости он начинает тормозить рекуперацией, отдавая энергию в батарею. Когда скорость падает до определенного значения, при которой рекуперация становится неэффективна для торможения, контроллер наоборот вкачивает в моторы энергию батареи продолжая активное торможение до полной остановки. На всём продолжении торможения полная блокировка колес исключена и получается некий эффект ABS. Усилие торможения развивается достаточное для того чтобы почти улететь через руль при полном резком нажатии. Поэтому реализовывать его с помощью одной только кнопки – плохая идея. Для плавного дозирования торможения годится аналогичная газульке ручка на датчике Холла. Вариант подешевле – кнопка с потенциометром. Потенциометром в этом случае устанавливается требуемое усилие торможения.
Калибровка ручек газа и тормоза
Сразу после прошивки не будет никакой реакции на нажатия ручек газа и тормоза. Для того чтобы контроллер понимал, как на них реагировать, его необходимо обучить. Во время этой операции он запомнит минимальные и максимальные значения напряжений сигналов управления. Они не обязательно должны быть именно от 0 до 3,3 В и могут принимать любые значения этого диапазона, например от 0,5 В до 3 В.
Перед калибровкой необходимо убедиться, что контроллер выключен, колёса (включая фазные провода и провода от датчиков Холла), ручки газа и тормоза (если она нужна) подключены согласно схеме.
Для входа в режим калибровки нужно выполнить следующие действия:
- нажать и удерживать кнопку питания контроллера не менее 2 сек, в этот момент прозвучит многотональный звуковой сигнал
- кратковременно отпустить (менее секунды) и снова зажать и удерживать кнопку питания, в этот момент прозвучит короткий гудок высокого тона
- дождаться короткого гудка высокого тона
- отпустить кнопку питания
- дождаться длинного гудка низкого тона
- нажать пару раз полностью на ручку газа и отпустить
- нажать пару раз полностью на ручку тормоза и отпустить(если используется кнопка с потенциометром, то нажимать её при выкрученном потенциометре в минимальное сопротивление, чтобы показать максимальное напряжение на сигнальном проводе)
- нажать кнопку выключения
- перезагрузить контроллер и проверить реакцию на нажатия ручек управления
После успешной калибровки колёса должны соответственно реагировать на ручки газа и тормоза. Без нагрузки колёса могут в диапазоне высоких оборотов начинать вращаться рывками, если Вы применили в настройках ослабление поля. Это так называемая “отсечка” от превышения максимальных оборотов. При торможении колёса вращаются “туда – обратно” и не успокаиваются. В вывешенном состоянии колес это нормально, под нагрузкой такого не будет.
Если калибровка прошла успешно и контроллер не издает звуковых сигналов ошибки, но при этом колёса не крутятся либо крутятся медленно/с посторонними звуками, возможно необходимо подобрать правильную комбинацию фазных проводов/сигнальных проводов с датчиков Холла.
Это не все возможные настройки, а только основные которым обязательно нужно уделить внимание.
Не стесняйтесь поддержать автора этой статьи, если она оказалась полезной для Вас!
Заказать готовую прошитую плату с нужными настройками
Если Вам нужна уже готовая прошитая плата, но по какой либо причине не хотите заниматься прошивкой самостоятельно, Вы можете заказать её здесь.
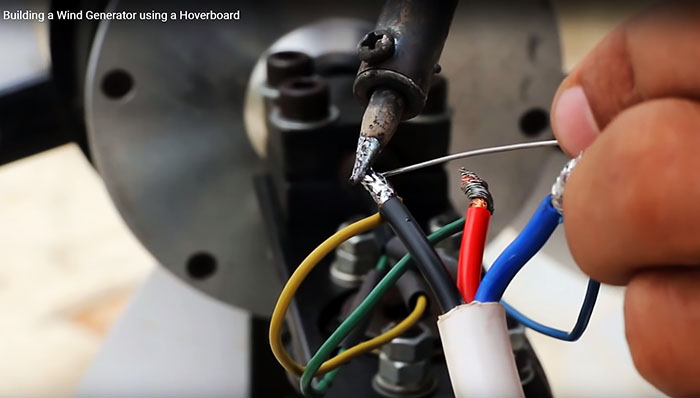
Мотор-колесо и другие детали от старого гироскутера станут оптимальной основой для изготовления ветрогенератора. В качестве хвоста используются фанера, а лопасти вырезаются из ПВХ трубы. Такой ветряк способен вырабатывать мощность до 150 Вт при скорости ветра 5-7 м/с.

Материалы и инструменты:
- гироскутер с рабочим мотор-колесом;
- 6-дюймовая труба ПВХ;
- оцинкованная труба диаметром 3 дюйма;
- 5-миллиметровые круглые металлические пластины;
- дюймовые металлические полосы;
- фанера;
- болты и гайки;
- ручная дрель;
- выпрямитель;
- углошлифовальная машина;
- лобзик;
- плоскогубцы;
- паяльник.
Процесс изготовления
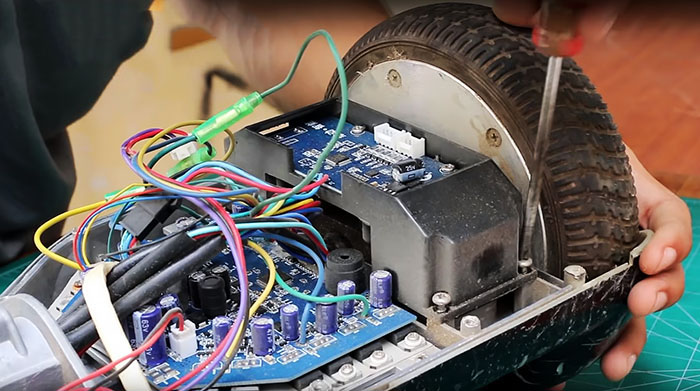
Сначала необходимо разобрать гироскутер, выкрутить все болты и вытащить мотор из корпуса с помощью плоскогубцев. Потребуется приложить значительное усилие, конструкция закреплена довольно сильно.
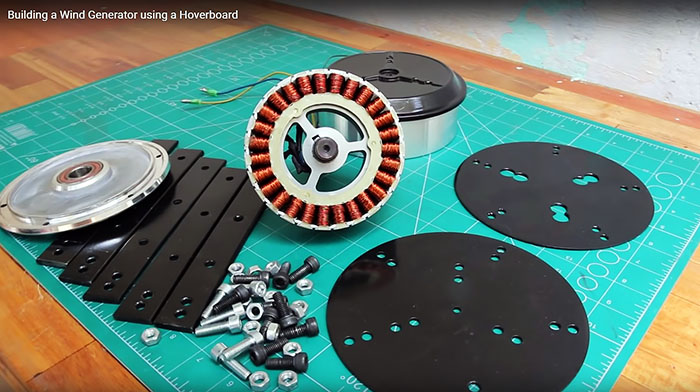
Далее, изготавливаем переходник-держатель. Из пластины выкраиваем 2 круга и нарезаем 5 полос. В заготовке просверливаем отверстия, как показано на рисунке.
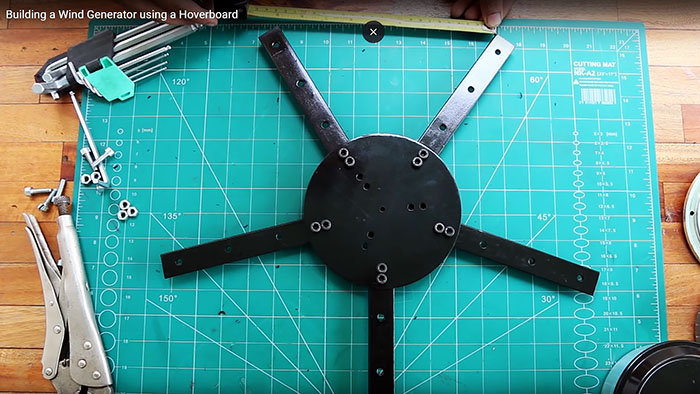


Переходником между хвостом и вертушкой станет еще одна пластина. На ней также высверливаем отверстия для закрепления хвоста, лопастной части и поворотного механизма.
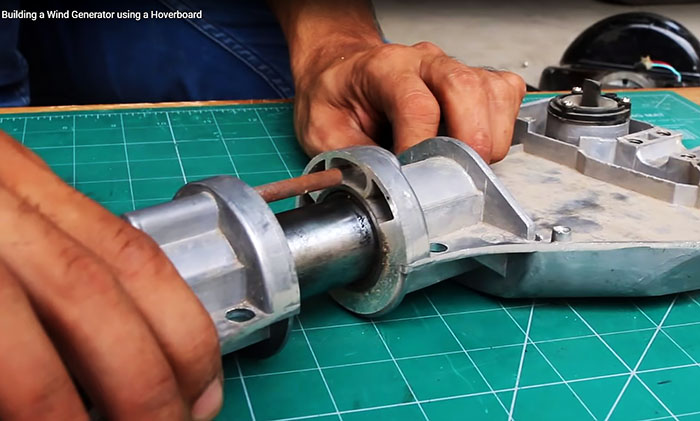
В качестве поворотного механизма используем еще одну деталь гироскутера – шарнирную часть. Для этого разрезаем корпус и демонтируем шатун.

Для крепления поворотного механизма и основной конструкции ветряка используем 2 металлические пластины. Одну из пластин привариваем к монтажному столбу на крыше. Вторая пластина устанавливается на шатуне.




Берем ПВХ-трубу и вырезаем лобзиком 5 лопастей. Каждое крыло выпиливается с расширением. В нашем случае самая узкая часть имеет ширину 5 см, а широкая – 12,5 см, длина чуть больше метра.
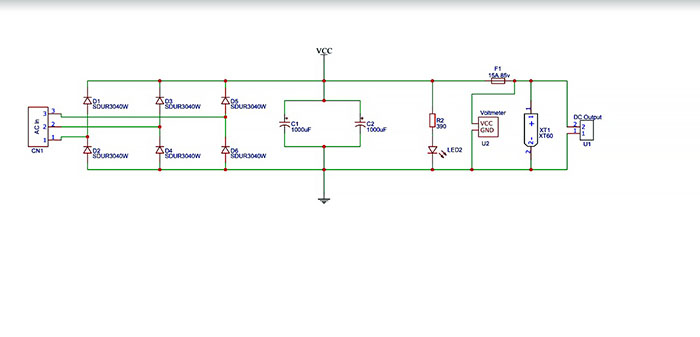
Трехфазный мотор-колесо генерирует трехфазный переменный ток. Для преобразования переменного тока в постоянный подсоединяем к движку выпрямитель, который построен по указанной схеме.

Проводим монтаж ветрогенератора на крыше. В качестве опоры используем оцинкованную трубу с металлической пластиной наверху. Для крепления нижней части берем металлические кронштейны.
Устанавливаем ветрогенератор на опоре и подсоединяем к батарее на 12В. Заряд к АКБ поступает при вращении ветряка.
Смотрите видео
Гибридный полноприводный карт из гироскутера. Как подключить и запустить колесо от гироскутера, покажем в .
Это обзор детского электромобиля на основе гироскутера. Далее я полностью покажу как можно сделать такой .
Самодельный электро картинг который Александр сделал для своих детей своими руками. Была крутая идея и вышел .
Моя вторая прошивка где два режима работы, с накатом и с электронным тормозом, можно менять без перепрошивки.
Электроскейт из гироскутера с компенсатором обратного угла наклона. Мощность 1400ватт, 4 стандартных аккума.
Первый собранный мной детский электровелосипед успешно работал от 12вольт,позже был сделан самокат для ребенка .
Эта простая самоделка, очень помогает в быту, и ничего не требует, кроме своевременной зарядки аккумулятора. очень .
Папа делает для детей плата гироскутера стандартная с прошивкой под потенциометр в данном случае самое .
Разбор конструкции детской машинки из гироскутера или силы изначально создавая машину была задача сохранить .
Начало и уже испытания будущего 4WD грузопассажирского миниавтомобильчика. Пока с одним задействованным .
Так теперь так все на базе гироскутеров sky платы колеса тоже гироскутеров ские и под прошивка под ручку газа данном .
Привет Друзья. Это самый простой и дешевый электромобиль без прошивки и почти без вмешательства в схему. Скорость .
Читайте также: