
Манипулятор своими руками из алюминиевого профиля
Добавил пользователь Евгений Кузнецов Обновлено: 04.10.2024
При строительстве дома необходим подъем стройматериалов: на стены, на второй этаж, балки для кровли. Когда делаешь все один, приходится решать эти вопросы. Кто-то прибегает к автокрану или к манипулятору грузовика. Но это накладно постоянно нести такие затраты.
А если Вы решили построить дом из бруса? И не из 150х150 мм, а сечением 180 мм! Одному без помощника или механизации это не под силу.
Давайте посмотрим на конструкции самостройщиков и бригад-профессионалов, которые применяют на своих объектах мини-краны с электротельферами.
Строительство бревенчатого сруба с помощью мини-крана с удобным захватом. Не нужны стропы. Высота крана позволяет возвести полноценный этаж. Но это конструкция – материалоемкая, как видно. Использован большой объем трубы
Есть более простые варианты, когда мини-кран крепится к стене строения (или к фундаменту на начальном этапе строительства)
Еще один мини-кран с креплением к фундаменту или срубу. Позволяет поднять брус с максимальным весом 80 кг. Использован электротельфер Denzel на 125 кг.
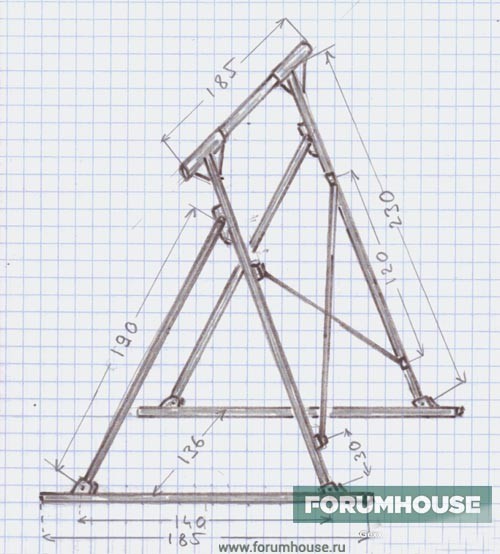
Чертеж мини-крана. Поворот стрелы – на 360 гр.
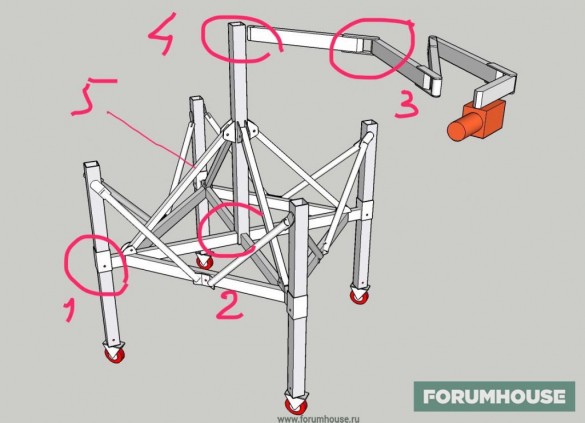
Еще одна очень компактная и мобильная конструкция мини-крана. Этот кран можно перевозить от объекта на объект (для тех, кто работает в бригаде) в салоне автомобиля:
Вертикально установлен и закреплен брус как мачта. А на него крепится конструкция стрелы с электротельфером
Крепление бруса (мачты) к стене. Когда еще нет стен, мачту придется крепить на диагональные подпорки из балок.
Устройство для фиксации, захвата бруса. Но можно использовать обычные стропы.
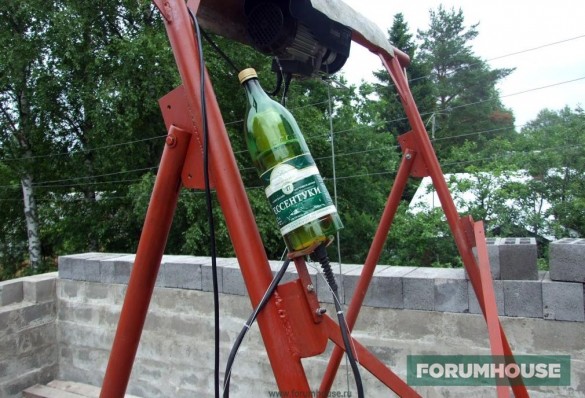
Я присоединяюсь к мнению автора этой самоделки. Наиболее оптимальны и менее материалоемкие будут именно такие конструкции с электротельферами, которые крепятся к вертикальным мачтам, балкам, стенам:
Конструкция простая, можно изготовить самому при наличии необходимого инструмента: болгарки, сварочного аппарата. Фиксировать на мачту из бурса или два скрученных бруса.
Схемы и чертежи такого крана
Выбор электротельферов в продаже большой на разную массу подъема и с разными вариантами крепления: стационарные или на роликах.
Мой сосед в нашем поселке не сооружал кран. Он затаскивал брус по наклонной плоскости (два других бруса) таким электротельфером. Просто прикручивал его к стене строения.
Я в свое время, при строительстве бани из бруса не стал ничего выдумывать, а нанял для работы вечерами и в выходные студента. Это обошлось мне дешевле, чем покупать электротельфер и сооружать кран. Но и высота была небольшая.
Видео с описанием изготовления мини-крана
Фотография взята из открытых источников, с сервиса Яндекс.Картинки
Пользователи портала делятся опытом строительства самодельных подъёмников от простых до сложных конструкций.
- Как сделать подъёмник для кладки газобетона.
- Какие детали и инструменты нужны для строительства мини-крана.
- Как сократить затраты на строительство универсального подъёмника.
Подъемник для кладки газобетонных блоков

Немецкий мини-кран с выдвижной центральной стойкой


Я самостоятельно строю дом и, чтобы иметь возможность класть газобетонные блоки, построил подъёмник по вышеуказанному образцу. Кран сделал полностью разборным, кроме основания. Максимальную нагрузку на крюке не мерил, но меня (вес 95 кг) он спокойно поднимает.

Технические характеристики подъёмника:
- ширина – 2200 мм;
- высота – 4200 мм;
- вылет стрелы – 4200 мм;
- грузоподъёмность электрической тали – до 800 кг;
- полный вес крана с балластом – примерно 650 кг;
- вес подъёмника без балласта – около 300 кг;
- максимальная высота подъёма блока для кладки – 3500 мм.


Для изготовления подъёмника пользователю потребовалось:

В процессе эксплуатации конструкцию доработали. Например, пользователь проложил кабель для лебёдки в гофротрубе и удлинил кабель пульта управления.


Важный нюанс: чтобы подъёмник мог передвигаться по строительной площадке или, например, по бетонной плите перекрытия второго этажа, нужно поддерживать рабочее место в чистоте, т.к. осколки ГБ, мусор мешают перестановке крана.

Конструкция необычного подъёмника заинтересовала пользователей портала.

С таким подъёмником, думаю, как делают в Германии, нужно делать кладку из блоков крупнее, чем стандартные. Длиной и высотой в 2-3 раза больше от обычного ГБ. Запаса грузоподъёмности у крана хватит, а скорость кладки увеличится в разы.
По словам Крестика, он слышал, что на портале кто-то уже пытался заказать у производителя газосиликата блоки формата 1х0.4х0.6 м. Но оказалось, что это — невыгодно заводу, т.к. нужно перенастраивать линию по выпуску ГБ, а ради небольшого объёма (на обычный частный дом) этого делать не будут.

Мне вот интересно: упростилась ли работа на площадке при использовании крана? Какие работы с ним можно сделать, а какие – нет?
Отпадает необходимость ставить леса при кладке стен из ГБ. Подъёмник можно собрать и разобрать. Бетонные перемычки над окнами я заливал по старинке, из вёдер, т.к. объём небольшой, и проще это сделать с одним помощником.
Общий итог: мини-кран получился удачный, а при некоторых доработках его конструкции подъёмник можно запустить в мелкосерийное производство.
Мини-кран из металлолома


Думаю, мой кран может и больше поднять, но перегружать его я не стал. Кран разбирается на части весом 30-60 кг и спокойно перевозится в прицепе легкового автомобиля. На багажнике вожу стрелу. В статике испытал конструкцию весом в 400 кг. Обычно поднимаю груз весом до 150 кг. Мне для моих строительных нужд этого вполне достаточно.

За один раз кран, при вылете стрелы в 5 м, поднимает 10 блоков весом по 15 кг, или четыре 15-ти литровых вёдер с раствором.

Ступица от автомобилей, грузовиков и сельхозтехники часто используется для изготовления поворотного узла в самодельных кранах. Главное — просчитать действующие на неё и крепёж нагрузки.

- выносные опоры и основание- прямоугольная труба сечением 8х5 и 8.5х5.5 см;


- червячные редукторы для стреловой и грузовой лебёдки.

- трёхфазный электродвигатель с реверсом, мощностью 0.9 кВт, переделанный на питание от сети 220 В;

Кран получился мобильным, и его, опустив стрелу, можно переместить с места на место, перекатывая на колёсиках по утрамбованному грунту. Регулировка по уровню осуществляется при помощи винтовых опор.

Металл, редукторы и ролики куплены на вторчермете. Новые только трос и подшипники.

Вес крана без противовеса – около 250 кг. Себестоимость конструкции, с учётом покупки расходников — отрезных дисков для УШМ, электродов для сварочного инвертора и краски, – 4 тыс. руб.

Кран, + время на токарные работы, + подбора комплектующих и примерка узлов, я сделал за 3 рабочих дня. В дальнейшем, по окончании работ, полностью разберу его.

Недорогой мини-подъёмник


Моя конструкция попроще, чем у авторов выше, но меня она вполне устраивает. Купил тельфер грузоподъёмностью 300 кг без блока и 600 кг с блоком. Испытания показали, что устройство может поднять груз весом в 250-270 кг, потом срабатывала защита двигателя. За строительный сезон я с его помощью поднял около 40 паллетов со строительными блоками, 6-ти метровый брус для мауэрлата, стропила, раствор для кладки и бетон для армопояса.

Подъёмник, опять же из экономии, сделан из б/у труб, уголка и швеллера.


Чтобы иметь возможность собрать подъёмник на перекрытии второго этажа, все узлы (там, где не нужна сварка) сделаны разборными — на болтовых соединениях.

На стойку на хомутах установлен тельфер.

На пульт управления, на случай дождя, надевается пластиковая бутылка с отрезанным донцем.
Тельфер закрывает козырёк из б/у кровельного железа.

При подъёме поддона под него подкладываются две доски, и на них опускается поддон.

Вся конструкция фиксируется к полу струбцинами.

Чертёж с размерами подъёмника.

Это темы, где подробно рассказывается, как сделать подъёмник для газобетона, и приведены десятки вариантов мини-кранов, от простых до самых сложных конструкций.
Здравствуйте, дорогие друзья! Сегодня мы поговорим про достаточно необычное, но для многих полезное и необходимое решение. Это манипулятор своими руками, который можно установить на обычный прицеп.
Кто-то подобные конструкции устанавливает на ГАЗ 53 непосредственно на кузов, либо же на ЗИЛ и на Газель. Другие же используют простые легковые прицепы, совершенствуя их конструкции и расширяя эксплуатационные возможности.
Каким именно будет манипулятор, решать вам. Это может быть гидравлический или ручной с механическим приводом, фактически зависящем от ваших усилий. Это вопрос к тому, какую конкретно лебедку вы купите для реализации поставленной цели.

Назначение и технические характеристики
Основные преимущества
Применение
Конструктивно разработан для навески на трактора МТЗ, ЮМЗ, ХТЗ а также их импортных аналогов. Подключается к штатной гидросистеме трактора. Не требует регистрации в органах технического надзора.
Модернизация
По результатам опытной эксплуатации в базовую модель крана были внесены следующие изменения и доработки:
- аутригеры заменены гидравлическими;
- установлен 5-ти секционный гидрораспределитель, с помощью которого осуществляется полное управление краном-манипулятором: поочередное управление гидравлическими аутригерами, подъем/опускание стрелы, выдвижение стрелы, поворот стрелы на оси. По желанию клиента управление краном-манипулятором может быть перенесено в кабину или за кабину трактора;
- усовершенствован подшипниковый узел оси поворота стрелы, который теперь является закрытого типа с двумя тавотницами для смазывания;
- внесен ряд изменений в конструкцию крана-манипулятора, что дало возможность сместить точку опрокидывания ближе к трактору;
- усилено заднее сцепное устройство, что дает возможность буксировать прицепы большей массы;
- установлены дроссели для ручной регулировки скорости поворота стрелы;
- на каждом из гидроцилиндров крана-манипулятора установлен гидрозамок для автоматического запирания рабочей жидкости в полостях цилиндров с целью их фиксации в заданных положениях под нагрузкой.









Самостоятельное изготовление
Большая часть дополнительного оборудования присоединяется сзади (плуги, бороны, сажалки), поэтому техника оснащается задней навеской. Основные элементы конструкции:
- наружный рычаг;
- кронштейн поворотного вала;
- верхняя и нижняя тяги;
- раскос;
- проушина;
- стяжка;
- ось.
На эту базовую конструкцию крепится собственно оборудование.
Основные виды оборудования для минитрактора:
- плуг — используется для вспашки почвы, т. е. переворота пласта земли;
- бороны — измельчают комья земли, оставшиеся после вспашки, и облегчают посадку урожая;
- картофелесажалка — облегчает посадку корнеплодов: картофеля, свеклы, топинамбура и пр.;
- картофелекопатель — ускоряет уборку корнеплодов, перемещая их на поверхность почвы, откуда их легко собрать руками;
- грабли — для ухода за урожаем и междурядьями;
- культиватор — для рыхления земли перед посадкой и ухода за растениями в процессе роста;
- опрыскиватель — предназначен для полива и внесения жидких удобрений (как органических, так и минеральных).
Прежде чем приступить к работе, необходимо приготовить необходимые инструменты и материалы и выполнить чертежи, следя за соответствием веса и размеров навески возможностям минитрактора. Можно найти готовые чертежи в интернете, а можно изготовить самому.
Оборудование для подготовки почвы
Плуг — вид тяжелого оборудования, использование которого зачастую определяет выбор между мотоблоком и трактором. Уже на этапе составления чертежей важно уделить особое внимание размерам и форме режущих элементов (сошника, лемеха) — они определяют эффективность работы, степень углубления в почву и объем переворачиваемой земли. Правильно сделанный плуг в процессе работы не должен уходить в сторону, зарываться в землю или выходить наружу.

Главные параметры:
- угол кромки, погружающейся в землю — около 40°;
- изгиб лопасти (определяющий угол отвала) — 25—130°.
Лемех или сошник — деталь, которая принимает на себя основную нагрузку. Изготавливается из листовой стали толщиной 3 мм. Варианты формы:
- цилиндрическая (самая распространенная) — обеспечивает качественное измельчение почвы, но в
- пласт проникает неглубоко, что делает ее подходящей для обработки целины;
- полувинтовая — откидывает пласты почвы без разрыхления.
Основные этапы изготовления:
- В основе конструкции — металлическая труба прямоугольного сечения длиной 0,5—1 м.
- Режущий элемент вырезается из листа металла по выкройке.
- Затем детали загибаются (в идеале стоит использовать листогибочный станок, если его нет — тиски и наковальню).
- Нижняя часть отвала и режущий элемент усиливаются металлической лентой толщиной 5 мм, которая приваривается или фиксируется потайными заклепками.
- Поверхности тщательно зачищаются.
- С противоположной стороны приваривается держатель длиной до 40 см. В нём проделываются 3—4 отверстия, чтобы можно было регулировать глубину вспашки.
Для тяжёлого плуга дополнительно монтируются два колеса, которые обеспечивают равновесие плуга и уменьшают нагрузку на минитрактор. Подходит для мощных минитракторов, готовых тянуть такой вес.
Для посадки
Картофелесажалка или оборудование для посадки корнеплодов одно из самых экономичных. Его можно сделать из подручных материалов, практически из металлолома, а работать такое оборудование будет долго и безотказно.
Основные элементы и порядок сборки:
- Рама сваривается из уголка и профильной трубы.
- Колёса с грунтозацепами изготавливаются из ободов или автомобильных дисков, к которым привариваются металлические пластины или тонкие уголки.
- Рама устанавливается на колеса.
- Бункер для картофеля можно согнуть и сварить из листовой стали, но проще взять бак от старой стиральной машины активаторного типа. Он ставится на раму. В задней части прорезается отверстие под цепь.
- Элеватор. Делается из двух звёздочек, насаженных на валы, и цепи. Один вал служит осью колес, второй располагается на верхнем краю бункера.
- По всей длине цепи привариваются ковши, сделанные из металлического прута. Цепь прокладывается между звездочками и обеспечивает перемещение корнеплодов из бункера в почву.
- Цепь изолируется пластиковой трубой, чтобы повысить точность внесения корнеплодов.
Делается такая задняя навеска на минитрактор своими руками достаточно легко и просто. Несмотря на простоту и дешевизну, конструкция надежна и практически не подводит. Интервал посадки корнеплодов зависит от количества ковшей и расстояния между ними.

Самодельная картофелесажалка
Уход за урожаем
Для рыхления междурядий и другого ухода за урожаем используются грабли, фрезы и культиваторы. Основное их назначение — прополка междурядий, т. е. рыхление земли и удаление сорняков.
Порядок изготовления:
Расстояние между ножами должно быть равным ширине гряд, чтобы обрабатывать междурядья, не затрагивая посадки. Также это оборудование может использоваться для подготовки почв перед посадкой, весеннего рыхления и прополки.
Полив и разбрасывание удобрений
В засушливых районах полив является одной из самых трудоемких операций. Для механизации этого процесса изготавливается рама, на которую монтируется бак для воды с насосом, работающим от привода тракторного двигателя. Насос качает воду и подает ее по шлангу. Специальная насадка на шланг обеспечивает радиус действия до 10 м. Этот же бак может использоваться для жидких удобрений. На видео роликах можно оценить, насколько ускоряет полив такое нехитрое приспособление. Объем бака зависит от класса трактора. Оптимально устанавливать емкости не более 200 л.
Твердые удобрения (навоз, компост) следует вносить как минимум один раз в год. Каждый, кто пробовал мастерить картофелесажалку, быстро разберется, как сделать навеску на минитрактор своими руками — действует она по тому же принципу. На раму устанавливается бункер, внутри которого находится ворошилка. Удобрения насыпаются в бункер, а ворошилка обеспечивает равномерную подачу к заслонкам. Оттуда удобрения попадают на разбрасывающие диски, на которых находятся специальные лопасти, захватывающие удобрения.
Уборка урожая
Для ускорения уборки урожая можно изготовить такое навесное оборудование для минитракторов своими руками как картофелекопалка. Они бывают двух типов: пассивные или грохотные (вибрационные).
Порядок изготовления:
- Вырезать режущую часть из прочной стали толщиной 3—5 мм. Можно использовать старые диски от циркулярной пилы, из которых вырезают два сектора и сваривают между собой в форме треугольника.
- Устанавливается плуг на подвес из металлического швеллера.
- С задней стороны приваривают прутья из арматуры. Они служат для удаления земли.
Картофелекопалка вибрационная несколько сложнее устроена, но эффективнее. Лемех выворачивает пласт и отправляет его на грохот, т. е. решеточную часть, где клубни отсеиваются от земли и также остаются на поверхности. После вибрационной копалки собирать клубни проще и легче.
Порядок изготовления:
- Сварить несущую раму из профильной трубы. Для вертикальных тяг используется швеллер.
- Изготовить ковш из стального листа толщиной 3—4 мм.
- Грохотная часть сваривается из арматуры или прутка.
- Подвижность лемеха и решетки обеспечит шлицевое соединение от КПП старого легкового автомобиля.
- Крутящий момент обеспечит редуктор, который можно взять от любого старого автомобиля. Также пригодятся кардан и ступица. Крутящий момент забирается от колес или вала отбора мощности трактора.
Погрузчик на заднюю навеску трактора своими руками
Для многих владельцев ЛПХ (личных подсобных хозяйств) погрузчик на заднюю навеску трактора весьма и весьма интересен. Почему? Потому что приобретение узкоспециализированного агрегата (погрузчика) — слишком дорогое удовольствие, и рачительный хозяин вряд ли будет тратить на него кучу денег. Куда проще модернизировать имеющийся в хозяйстве трактор.
Что для этого нужно? Во-первых, металл (его понадобится немало). Во-вторых, специальный инструмент. В-третьих, прямые руки.
Лучшая база
Как показывает практика, самодельный погрузчик на заднюю навеску трактора лучше всего приживается на технике белорусского МТЗ. Кроме того, он весьма распространен на территории России. До начала работ необходимо ознакомиться с плюсами и минусами рассматриваемого решения.
Начнем с первых. Неоспоримыми преимуществами создаваемого навесного оборудования выступают:
- возможность подбора длины и высоты выгрузки такой, какая нужна в конкретных условиях;
- экономия — достаточно просто ознакомиться с текущими ценами на погрузчики, чтобы оценить ее масштабы.
Ко вторым — недостаткам — следует отнести:
- меньшую мощность по сравнению с заводской погрузочно-разгрузочной техникой;
- необходимость иметь специальный инструмент, а также большое количество металла.
Что понадобится?
Итак, вы все же решили сделать погрузчик на заднюю навеску трактора своими руками. Перечислим инструменты, которые вам понадобятся:
- оборудование для резки металла — резак (газовый) или болгарка (угловая шлифовальная машинка);
- разводной ключ, молоток, кувалда и так далее;
- аппарат для сварки.
Сварочный агрегат должен быть исправно работающим. Дело в том, что от качества его работы зависят главные характеристики будущего погрузчика: долговечность, прочность, надежность.
Если говорить о материалах, понадобятся следующие:
- пластины и профили (в обоих случаях металлические) — это база будущей конструкции. Толщину элементов следует выбирать в соответствии с задачами, которые будут выполняться;
- гидравлические цилиндры — не менее трех штук: два малых и один большой. Первые будут отвечать за изменения угла наклона ковша, второй — за подъем;
- шарнирные соединения цилиндрического типа.
На стадии подготовки необходимо также разработать чертеж погрузчика на заднюю навеску трактора. Безусловно, задача не из легких. Однако ниже вы найдете все необходимые материалы.
Какими преимуществами обладает техника с гидравлическим приводом?
Большинство современных минитракторов совершенно оправданно оборудуются гидравлическими системами. В отличие от техники, в комплектацию которых нет гидравлики, они обладают рядом преимуществ:
Сразу оговоримся, что совсем дешево делать не будем, т.к. не хочется убивать нервные клетки, делая доморощенные энкодеры для моторчиков + хочется упростить создание 3D модели, которая нужна для управления через ROS (ссылка на готовую модель – ниже в статье).
На момент написания статьи ориентировочная конечная стоимость изделия составляет ~70 000 руб. Если у вас есть 3D принтер, то можно смело вычесть из нее 20 000 руб. Если принтера нет, то его появление станет приятным бонусом. Все расходы я буду описывать исходя из того, что у нас нет ничего, кроме денег.
Как выглядит результат:

Также нужно отметить, что для программирования руки нам понадобится компьютер с установленными ОС Linux (я использую Ubuntu 18.04) и фреймворком ROS (я использую Melodic).
Отвечаю. Изначально я не хотел заморачиваться с созданием роборуки и думал просто купить что-нибудь простенькое, но достаточно функциональное в сборе.
Что являлось для меня критериями функциональности и минимальной допустимой простотой (т.е. почему НЕ подойдут манипуляторы с алиэкспресса) – можно обсудить в комментариях, чтобы не грузить тех, кому это очевидно и/или не интересно.
Конкурентные решения на рынке
Опишу, однако, кратко примеры того, что я рассматривал на рынке:
Забегая немного вперед скажу, что делать мы будем копию робо-руки PhantomX Pincher Robot Arm Kit Mark II, которая производится именно компанией TossenRobotics.
Итого, видим, что 70 000 руб – это совсем не так дорого.
Что же нам нужно купить?
Все цены привожу на момент написания статьи (июль 2020 года):
1) 6 моторчиков DYNAMIXEL AX-12A

Я покупал по цене 7200 руб за 1 штуку, но, кажется, можно найти и за 6000 при большом желании. Будем считать, что вам не повезет и вы тоже купите за 7200.
Суммарная стоимость: 43 200 руб
Подойдет любой простенький, можно уложиться в 20 000 руб.
3) Arduino Uno + Power Shield


Стоимость: ~4 000 руб
4) Опционально (но я очень рекомендую): Лабораторный источник питания

Стоимость: ~3 500 руб
Сборка
Отлично! Мы закупили все, что нам нужно (вероятно, дольше всего ждали доставки моторчиков, мне их везли больше месяца).
1) Напечатаем детали для манипулятора на 3D принтере.
Качаем STL файлы отсюда
2) Собираем воедино с моторчиками. Проблем со сборкой быть не должно, но если они вдруг появятся, можно воспользоваться вот этой инструкцией
Делаем 3D модель
Класс! Рука у нас есть, но ведь ей же нужно как-то управлять. Хочется максимально использовать достижения человечества, поэтому установим себе ROS.
Для того, чтобы полноценно работать с манипулятором в ROS – нужно сделать его URDF модель. Она будет нам необходима для того, чтобы управлять робо-рукой с помощью пакета MoveIT!
На момент написания статьи последняя стабильная сборка доступна для Melodic/Ubuntu 18.04, чем и объясняется мой выбор версии системы и фреймворка в начале статьи.
Построение URDF модели – довольно трудоемкая (и, на мой взгляд, самая скучная) часть данного проекта. Нужно немного допилить напильником stl модели компонентов и соединить их воедино в XML-образном файле, вручную подбирая правильные коэффициенты смещения деталей друг относительно друга.
Кто хочет – может проделать работу самостоятельно, всем остальным поберегу нервы и просто дам ссылку на свой готовый файл:
В данной модели пока нет захватывающего устройства, однако, до того момента, чтобы захватывать предметы в реальном мире нам еще далеко. Для остальных задач этой модели более чем достаточно.
Выглядит модель вот так:
Из полученного URDF файла мы сделаем конфиг MoveIT!, который позволит нам моделировать движения манипулятора и отправлять управляющие команды на реальную робо-руку.
Для создания конфига есть отличный туториал (ссылка)
Тут я могу опять сэкономить время и предоставить свой конфиг. Лежит он вот тут:
Можно скачать конфиг с гитхаба и запустить следующей командой:
Примерно так можно будет управлять нашей реальной робо-рукой через rviz, когда мы подключим ее к ROS:
А что с реальной рукой?
Переместимся из мира 3D моделей в суровую реальность. У нас есть собранный ранее манипулятор. Хотелось бы его как-то подвигать. Сделаем это с помощью Arduino UNO и Power Shield.
Подключим первый моторчик манипулятора (который снизу) к Power Shield'у и блоку питания следующим образом:

Да, data pin моторчика мы соединим сразу с 3 и 4 выводом Arduino. Пытливый читатель мануала Dynamixel (вот он) сразу заметит, что связь с внешним миром у моторчика организована по Half Duplex Asynchronous Serial Communication, а это означает, что data pin используется сразу и для получения команд и для ответа.
По умолчанию, на аппаратном уровне Arduino умеет работать только с Full Duplex UART. Эту проблему можно обойти, используя Soft Serial библиотеку, что мы и сделаем. Именно использование Half Duplex режима объясняет подключение data pin мотора к 3 и 4 выводам шилда одновременно.
Помимо полудуплексного обмена работа с Dynamixel через Arduino имеет еще пару занимательных моментов, которые могут быть не совсем очевидны с самого начала. Сведем их все воедино.
Как подвигать наш манипулятор?
1) Сначала скачаем нужную библиотеку. Она называется ardyno и ее можно получить через Arduino Library Manager, либо тут (ссылка)
2) По умолчанию Dynamixel AX-12A хотят работать с baud rate = 1000000. Однако Software Serial Interface не потянет такую скорость, поэтому baud rate стоит снизить до 57600. Таким образом, начало файла с вашей программой будет выглядеть примерно вот так:
3) Все наши моторчики соединены друг с другом последовательно. Значит, чтобы обращаться к каждому из них — нужно знать его ID? Это действительно так, объект DynamixelMotor при инициализации получает два параметра: interface (одинаков для всех, его мы задали в предыдущем пункте) и id (должен быть у всех разный, иначе поведение будет у манипулятора весьма странное)
Id каждому моторчику придется задать вручную. Кажется, что будучи соединенными последовательно, они могли бы и сами рассчитаться по номерам от 1 до 6, но этого не предусмотрено. Поэтому нужно каждый моторчик отдельно подключить к Arduino (отключив от остальных) и выполнить следующую программу:
Изначально все моторчики имеют именно поэтому мы и указываем вверху
NEW_ID для каждого моторчика нужно заменить на число от 1 до 6 (да, ок, первый моторчик можно не трогать). Нумеруем их в порядке от нижнего к верхнему.
Ура! у нас есть полноценный манипулятор, который мы можем двигать, а также имеется 3D модель к нему. Можно брать ROS и программировать любые крутые штуки. Но это уже рассказ для отдельной статьи (и не одной). Данное же повествование подошло к концу, спасибо за внимание!
Читайте также: