
Ходячий робот своими руками
Добавил пользователь Евгений Кузнецов Обновлено: 18.09.2024
Давненько хотел собрать робота. Самого простого, который только и умеет, что ходить по нарисованной чёрной линии. Но руки всё никак не доходили.
Идея робота не нова, первый такой робот появился аж в 1929 году (!) и носил название кибернетический Тузик. Впервые встретил схему и описание робота в книге "Юный кибернетик" 1979 года. Книга мне попала в руки, когда мне было примерно 10 лет, и робот убил меня наповал своей супермегаложностью.
Только глядя на шасси робота невозможно отделаться от ощущения, что создатели книги разрабатывали роботов для захвата мира, а не для объяснения детям основ роботостроения.
Электрическую схему не буду даже приводить, она невероятно сложна и содержит сотни радиоэлементов. И единственное что робот умел, это ходить по линии. Что странно даже в то время, с имеющимися тогда в наличии транзисторами МП42, было возможно повторить предложенную ниже простейшую схему.
В детстве не хватало знаний, а потом не хватало времени, но тут помогла самоизоляция. Но вот беда под рукой слишком мало деталей для реализации задумки, а радиомагазин закрыт на карантин. На просторах интернета множество современных схем "простых" роботов. Простых в кавычках так-как для их реализации предлагают использовать Ардруино или микроконтроллеры. И даже сравнительно простые схемы содержат слишком много деталей. Я же решил упростить схему максимально и сделать её пригодной для повторения, даже тому, кто в первый раз взял в руки паяльник. В большинстве схем у подобных роботов 2 глаза-фотодадчика, мы же обойдёмся одним. И так схема.
Я даже сам до сих пор не верю, что настолько простая схема работает, но факт остаётся фактом. Схема представляет собой подобие простейшего фотореле. Когда фотодадчик ФР1 "видит" чёрную линию количество принимаемого света мало и реле Р1 выключено, работает мотор М1 разворачивая робота в сторону белой бумаги. Попадая на белую бумагу фотодадчик открывает транзистор Т1 , срабатывает реле Р1 и теперь работает мотор М2 разворачивая робота обратно в сторону к чёрной линии. Цикл бесконечно повторяется. По сути, робот не едет вперёд, а пытается повернуть то вправо то влево, из-за этого движение напоминает шаги, попеременно то правым, то левым колесом.
Моторы М1 и М2 любые от игрушек с редуктором понижающим обороты. Можно без проблем заказать с алиэкспресс. Я использовал бесшумные моторчики от неисправных новогодних переливающихся ламп. Стоит заметить, что чем медленнее движется робот, тем по более тонкой линии он способен ехать.
Шасси робота представляет собой два электромотора, один для правого колеса, другой для левого. Повороты осуществляются за счёт остановки одного из колёс, как в гусеничной технике.
Транзистор Т1 подойдёт практически любой биполярный транзистор малой мощности n-p-n структуры. Я применил КТ315. При замене на аналоги необходимо учесть что будет другая цоколёвка.
Резистор Р2 переменный и служит для настройки робота. Его значение нужно выставить именно так, чтобы робот различал чёрный и белый. Лучше использовать многооборотный переменный резистор.
Светодиод Д1 служит для подсветки и устанавливается вблизи фотодадчика ФР1 . Но между ними нужно установить непрозрачный барьер для исключения засветки. Вместо барьера светодиод и фотодадчик можно обернуть изолентой или надеть на них термоусадочную трубку. Для ограничения тока на светодиоде до 3х вольт установлен резистор R1 . Подойдёт любой, достаточно яркий, светодиод.
Реле Р1 подойдёт любого типа на ток срабатывания 3-5 вольт.
Батарея Б1 - 3 пальчиковые батарейки. Но можно использовать и аккумулятор от телефона.
Корпус робота выполнен из распределительной коробки, а для повышения интереса ребёнка к роботу на крышку прикрутил деталь от конструктора. Ниже на видео можно посмотреть робота в действии.
Подписывайтесь на канал . Буду и дальше рассказывать о интересном и необычном в Норильске. Поддержать проект и приобрести Сувениры можно в магазине Norgame .
Всем привет! Сегодня я предлагаю вам сделать забавного бумажного робота. Думаю, что эта незатейливая, подвижная игрушка очень понравится детям, особенно мальчикам. Двигая шпажками, вы легко сможете научить своего робота ходить, поочередно поднимать ноги и даже садиться на шпагат. Поэтому, скорее готовьте материал, зовите своих маленьких помощников и садитесь за работу!

Для изготовления робота вам понадобится: 1 лист цветной бумаги, кусочек белой бумаги (для глаз и рта), ножницы, клей карандаш или ПВА, скотч, 2 деревянные шпажки или пластиковые трубочки для коктейля, чёрный фломастер

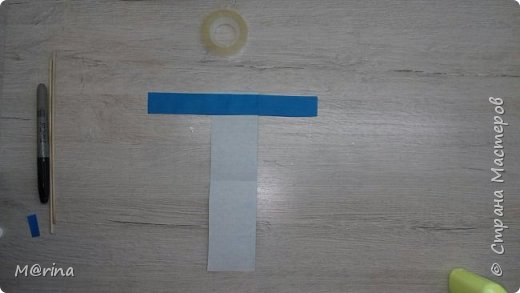
Сложите лист бумаги пополам и разрежьте его по линии сгиба на 2 части
Из одной части сделайте ноги для робота. Для этого сложите лист бумаги пополам 2 раза, чтобы наметить линии сгиба
Со стороны сгиба сделайте надрезы (шириной 6-8 мм) до середины листа
Расправьте лист, на крайнюю часть наносите клей и приклейте так, чтобы получилась треугольная призма

Вот так. Это будут ноги вашего робота

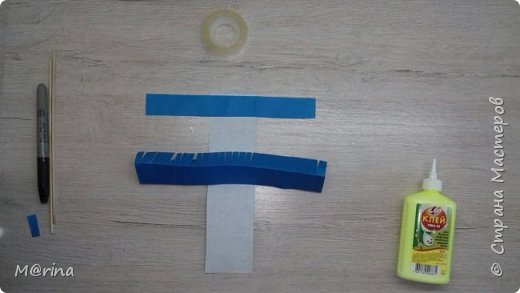
На другой части бумаги наметьте на глаз две линии: первая для рук 2-3 см., вторая для туловища робота 5-6 см

Разрежьте их по линии сгиба
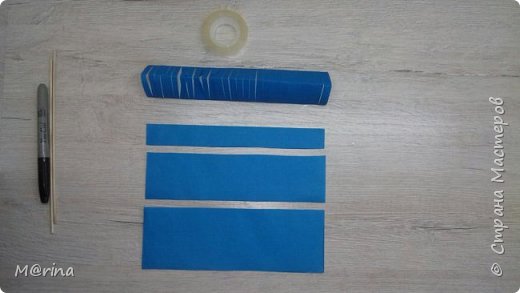
Полоску для рук приклейте к верхней части туловища (средней полоски)
Ноги положите на середину (как показано на фото), но не приклеивайте
Нижний конец заверните наверх и приклейте к рукам

От оставшегося куска бумаги отрежьте небольшой прямоугольник для головы и полоску для антенны

На кусочке белой бумаги нарисуйте глаза и рот и вырежьте их
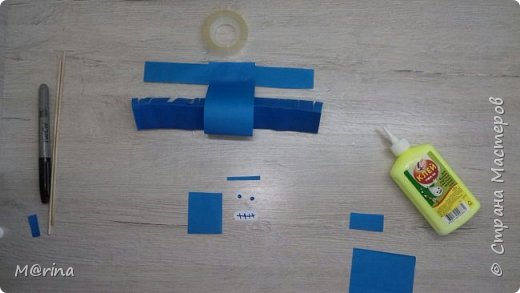
Приклейте глаза, рот и антенну к голове, а голову к туловищу
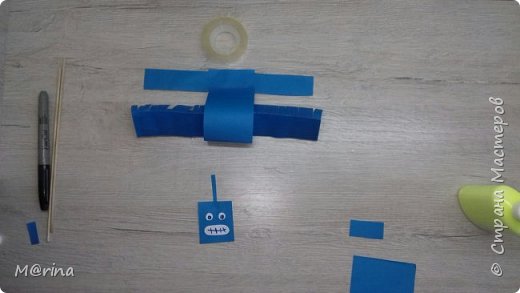
Голову и руки не обязательно делать прямоугольными. Вы можете проявить фантазию и сделать их любой формы (закруглить, приклеить дополнительные детали и т.п.)
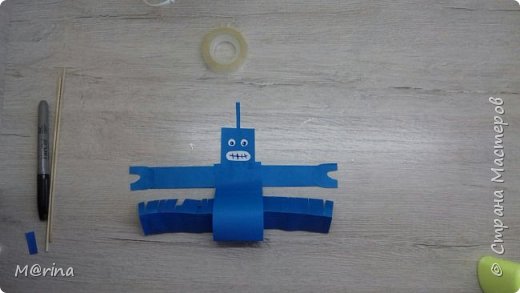
Осталось соединить скотчем нижнюю часть туловища и ноги с двух сторон и приклеить
к нижним частям ног шпажки (тоже скотчем) перпендикулярно

Обратите внимание на то, что шпажки своей длинной стороной должны быть с задней стороны робота. Так его легче будет "учить ходить". Ну, вот и всё! Ваш робот готов! Смело беритесь за шпажки и начинайте "движение"! Всем хорошего настроения и весёлых, познавательных игр!
1. Итак, вы преисполнились решимости совершить прорыв в робототехнике и создать робота, способного ходить. И он должен быть двуногим, потому что мир людей — мир двуногих существ. С чего вы начнете в первую очередь?
2. Хорошо. С этим определились. Вы посмотрели разработки других компаний, роботы которых более или менее успешно справляются с ходьбой на двух ногах. Так в чем же основная сложность того, чтобы научить робота ходить?
3. Теперь все ясно. Нужно создавать программное обеспечение. Как вы это будете делать?
4. Отлично. С путем разработки программного обеспечения разобрались. Пора начинать конструировать. Сколько минимум нужно сервоприводов, чтобы создать простого двуногого робота?
5. А какую же конструкцию ноги для своего двуногого робота вы выберете?
6. С ногами тоже теперь все более-менее понятно. Но ведь нужно еще и видеть, куда идешь. Какие датчики системы технического зрения вы будете использовать в своем роботе?
7. А какое расстояние сможет пройти ваш робот, прогуливаясь по жилому кварталу Shagal?
8. Остался открытым вопрос с руками. Руки роботу приделывать будете?
Поздравляем, ваш результат: из
Создать робота у вас не получится. Вы плохо представляете себе принципы конструирования роботов. Да и сами, наверное, мало ходите.
Поздравляем, ваш результат: из
Скорее всего вы сможете придумать робота, худо-бедно его собрать, но ваша поделка сойдет разве что для школьного кружка юных техников. Далеко она вряд ли уйдет, если вообще сможет сдвинуться с места.
Поздравляем, ваш результат: из
Вы знаете, как должен выглядеть и функционировать двуногий робот, что нужно для того, чтобы его собрать. Ваш робот сможет ходить: с кочки на кочку в ямку — бух.
Попробуйте развить свое исследование ходьбы в жилом квартале Shagal. Здесь вы найдете все, что нужно для научных променадов: все объекты инфраструктуры находятся в 15 минутах ходьбы от жилых домов, а вдоль Москвы-реки простирается живописная набережная имени Марка Шагала — вторая по протяженности в Москве.
Поздравляем, ваш результат: из
С гордо поднятой головой и с роботом под руку (если она у него будет) вы легко можете прогуляться по набережной имени Марка Шагала в жилом квартале Shagal. Обдумать новые свершения в роботостроении можно на практичной прогулке по комплексу — например, до торгового центра или кинотеатра, которые всегда в шаговой доступности.

Нашли опечатку? Выделите фрагмент и нажмите Ctrl+Enter.
Древние жители Австрии учли пол детей при их захоронении
Астрономы подтвердили наличие оксида титана в атмосфере ультрагорячего юпитера WASP-189b
Moderna начала клинические испытания мРНК-вакцины от ВИЧ на 56 добровольцах
Зациклиться на устойчивости
Как модернизация всех этапов производства и ответственность потребителей могут привести к устойчивому развитию
Астрономы подтвердили наличие оксида титана в атмосфере ультрагорячего юпитера WASP-189b
Японская компания ispace показала облик своего микролунохода
Древние жители Австрии учли пол детей при их захоронении
Обсерватория Swift перешла в безопасный режим из-за проблем с маховиком
Микроорганизмы выдержали экстремально высокие температуры из-за ускоренного метаболизма
Астрономы отыскали в Туманности Андромеды кандидата в черные дыры промежуточной массы
Пара аттосекундных импульсов запутала молекулярный катион и фотоэлектрон
Немарковский теплообмен с резервуаром объяснил эффект Мпембы
Микроорганизмы выдержали экстремально высокие температуры из-за ускоренного метаболизма
Оксинитрид титана позволил получить перовскитные солнечные элементы с рекордной эффективностью
Природу подледных озер Марса объяснили вулканическими отложениями и жидким рассолом
Камышовки нашли дорогу домой благодаря магнитным указателям остановки миграции
Исследователи из Meta разработали мультимодальный метод обучения нейросетей
Эволюционный успех ян-рукокрылых объяснили открытым каналом Розенталя
Эволюционный конфликт рабочих безжалых пчел с личинками привел к массовому убийству маток
Астрономы отыскали кандидата в магнитар со сверхдлинным периодом вращения
Самое сложное
© 2022 N + 1 Интернет-издание Свидетельство о регистрации СМИ Эл № ФС77-67614
Как сделать робота своими руками? Можно разработать в гараже-подвале или на чердаке. Подробные фото и видео инструкции для того, чтобы создать самодельных роботов. В этом разделе Вы найдёте инструкции для конструирования устройств своими руками, а это занятие для настоящего робототехника!

Новый робот-протез близок к настоящей руке
Судя по фотографиям, с новым протезом-роботом пациент управляется почти как с нормальной рукой. А ведь проект обещают ещё улучшить (фотографии Applied Physics Laboratory).

Робот пивоналиватель: beer-bot
Одному западному энтузиасту надоело придумывать простые команды для своего электронного друга Robotis, поэтому он решил занять его практически важным делом - разлитием вс.
Читайте также: