
Что стараются сделать как можно меньше между ротором и статором
Добавил пользователь Владимир З. Обновлено: 04.10.2024
ВОЗДУШНЫЙ ЗАЗОР МЕЖДУ РОТОРОМ И СТАТОРОМ РЕМОНТИРУЕМОГО ЭЛЕКТРОДВИГАТЕЛЯ.
В процессе разборки замеряют воздушный зазор ремонтируемого электродвигателя. Замеренный воздушный зазор сравнивают с каталожными данными ремонтной документации. Если такие сведения отсутствуют, о допустимости зазора можно судить по ориентировочным данным в таблице.
Воздушные зазоры у асинхронных электродвигателей.
вращения об. мин.
Если позволяет конструкция, воздушный зазор замеряют до разборки с каждой стороны электродвигателя в трех - четырех точках через отверстия в торцах щитов. Среднее значение зазора вычисляют как среднеарифметическую произведенных замеров. Особое внимание обращают на замеры зазоров у асинхронных машин. Увеличение воздушного зазора приводит к уменьшению коэффициента мощности cos ф, кпд и мощности машины.
Асинхронные двигатели с зазором, увеличенным более чем на 25%, в ремонт не принимают. Чтобы поднять коэффициент мощности при перемотке двигателей с увеличенным зазором, изменяют обмоточные данные.
Если машина не имеет отверстий в щитах, зазоры измеряют после разборки. Ротор укладывают на внутреннюю поверхность статора и замеряют зазор Q 1 в верхней точке. Затем ротор поворачивают на 90° и вновь замеряют зазор Q 2 в верхней точке. Средняя величина рассчитывается по формуле:
Одним из наиболее распространенных типов электрических машин в мире является асинхронный электродвигатель. За счет высокой надежности и неприхотливости в работе такие агрегаты получили широкое распространение в самых различных отраслях промышленности и сельского хозяйства, они помогают решать бытовые и общепроизводственные задачи любой сложности. Поэтому в данной статье мы детально рассмотрим особенности асинхронных двигателей.
Устройство
Конструктивно простейшая асинхронная машина представляет собой рамку, вращающуюся в переменном магнитном поле. Однако на практике данная модель носит скорее ознакомительный характер и практического применения в промышленности не имеет. Поэтому на рисунке 1 ниже мы рассмотрим устройство действующей модели асинхронного электродвигателя.
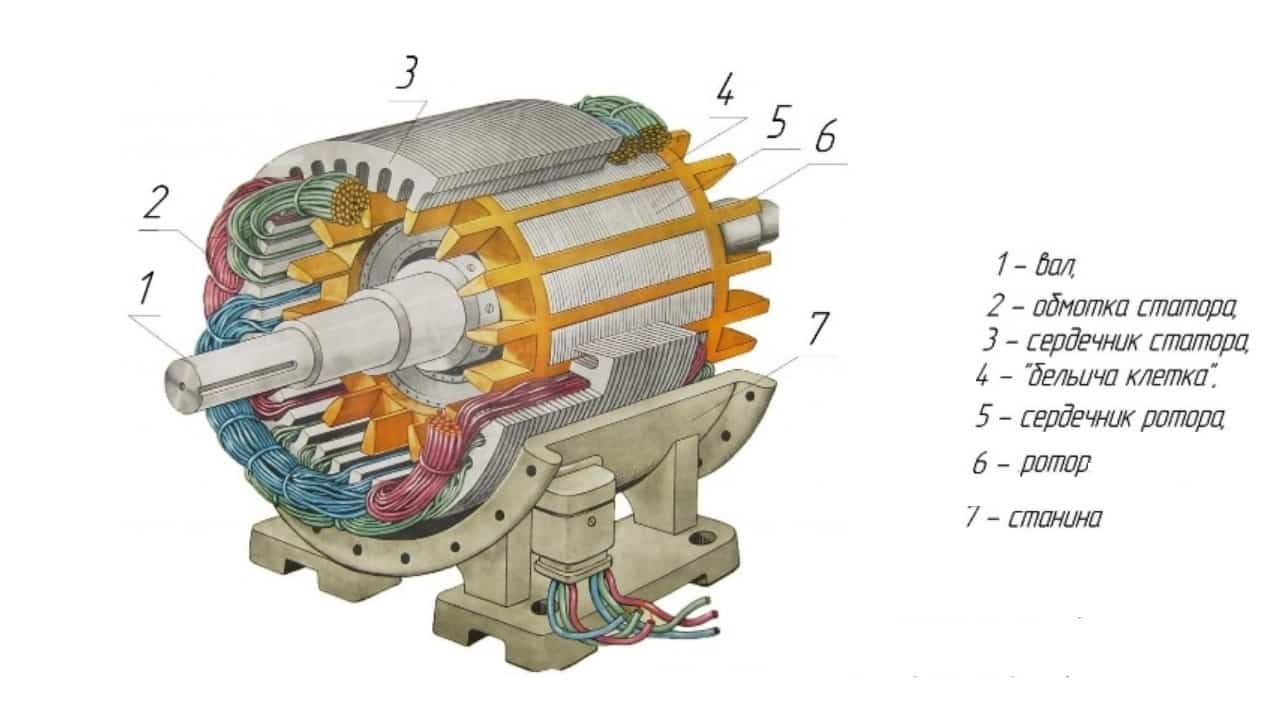
Рис. 1. Устройство асинхронного электродвигателя
Весь двигатель располагается в корпусе станины 7, ее основная задача состоит в обеспечении достаточной механической прочности, способной выдерживать достаточные усилия. Поэтому чем выше мощность агрегата, тем большей прочностью должна обладать станина и корпус.
Внутрь корпуса устанавливается сердечник статора 3, выступающий в роли магнитного проводника для силовых линий рабочего поля. С целью уменьшения потерь в стали магнитопровод выполняется наборным из шихтованных листов, однако в ряде моделей применяется и монолитный вариант.
В пазы сердечника статора укладывается обмотка 2, предназначенная для пропуска электрического тока и формирования ЭДС. Число обмоток будет зависеть от количества пар полюсов на каждую фазу. Также в части уложенных обмоток электродвигатели подразделяются на:
- трехфазные;
- двухфазные;
- однофазные.
Внутри статора располагается подвижный элемент – ротор 6. По конструкции ротор может быть короткозамкнутым или фазным, на рисунке приведен первый вариант. В состав ротора входит сердечник 5, также набранный из шихтованной стали и беличья клетка 4. Вся конструкция насажена на металлический вал 1, передающий вращение и механическое усилие.
Принцип работы
Заключается в формировании электромагнитного поля вокруг проводника, по которому протекает электрический ток. Для асинхронного электродвигателя данный процесс начинается сразу после подачи напряжения на обмотки статора, после чего в роторе наводится ЭДС взаимоиндукции, индуцирующей вихревые токи в металлическом каркасе. Наличие вихревых токов обуславливает генерацию собственной ЭДС, которая формирует электромагнитное поле ротора. Наиболее эффективный КПД асинхронной электрической машины получается при работе от трехфазной сети.
Конструктивно обмотки статора имеют смещение в пространстве друг относительно друга на 120°, что показано на рисунке 2 ниже:

Рис. 2. Геометрическое смещение фаз в статоре
Такой прием позволяет отстроить магнитное поле рабочих обмоток в строгом соответствии с напряжением трехфазной сети, которое имеет аналогичную разность кривых электрической величины.

Рис. 3. Принцип формирования магнитного потока асинхронного двигателя
На рисунке 3 выше все три фазы изображены в разных цветах для упрощения понимания процесса, также здесь изображена кривая токов, протекающих в фазах асинхронного электродвигателя. Теперь рассмотрим физические процессы в обмотках двигателя для трех позиций показанных на рисунке:
- I – в этой позиции максимальный ток протекает в красной обмотке электродвигателя, а значение силы тока в желтой и синей равны. Основной поток силовых линий формируется красной фазой, а два других дополняют его.
- II – в данной точке желтая синусоида равна нулю, поэтому никакого потока не создает, а сила тока красной и синей равны. Поток формируется сразу двумя фазами и смещается по часовой стрелке вправо, совершая поворот.
- III – третья точка характеризуется максимумом токовой нагрузки для синей кривой, а красная и желтая имеет равную амплитуду, но противоположную по направлению. В результате чего максимум магнитных линий южного и северного полюса сместиться еще на 30°.
По данному принципу магнитное поле статора вращается в асинхронной электрической машине в течении периода. За счет магнитного взаимодействия с полем статора асинхронного электродвигателя происходит поступательное движение ротора вокруг своей оси. Можно сказать, что ротор пытается догнать поле статора. Именно за счет разницы во вращении полей данный тип электрической машины получил название асинхронной.
Отличие от синхронного двигателя
Наряду с простыми асинхронными электрическими машинами в промышленности также используются и синхронные агрегаты. Основным отличием синхронного двигателя является наличие вспомогательной обмотки на роторе, предназначенной для создания постоянного магнитного потока, что показано на рисунке 4 ниже.
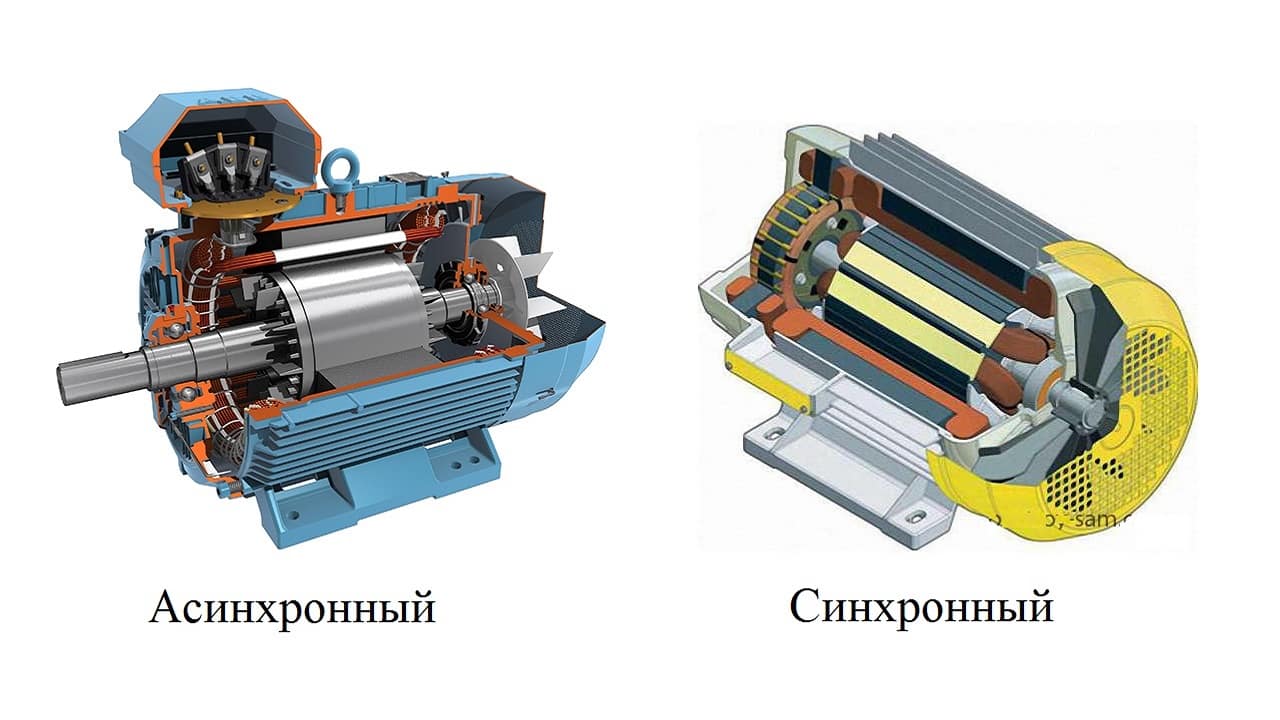
Рис. 4. Отличие асинхронного от синхронного электродвигателя
Эта обмотка создает магнитный поток, не зависящий от наличия электродвижущей силы в обмотках статора электродвигателя. Поэтому при возбуждении синхронного электродвигателя его вал начинает вращаться одновременно с полем статора. В отличии от асинхронного типа, где существует разница в движении, которая физически выражается как скольжение и рассчитывается по формуле:
где s – это величина скольжения, измеряемая в процентах, n1 – частота, с которой вращается поле статора, n2 – частота, с которой вращается ротор.
Синхронные электродвигатели применяются в тех устройствах, где важно соблюдать высокую точность синхронизации подачи питания и начала движения. Также они обеспечивают сохранение рабочих характеристик в момент пуска.
На практике существует огромное количество разновидностей асинхронных электродвигателей, отличающихся как сферой применения, так и мощностью согласно ГОСТ 12139-84 . В связи с тем, что все вариации перечислить невозможно, мы рассмотрим наиболее значимые критерии, по которым асинхронные аппараты разделяются на виды.
По количеству питающих фаз выделяют:
- трехфазные – используются в сетях, где есть возможность подключиться сразу ко всем фазам, но в частных случаях могут запускаться и в однофазной сети;
- двухфазные – применяются во многих бытовых приборах, состоят из двух рабочих обмоток, одна из которых питается напряжением сети, а вторая подключается через фазосдвигающий конденсатор.
- однофазные – как и предыдущая модель содержат две обмотки, одна из которых рабочая, а вторая пусковая.
По типу ротора различают:
- с короткозамкнутым ротором – имеет тяжелый пуск, но и меньшую стоимость;
- с фазным ротором – на роторе устанавливается вспомогательная обмотка, делающая работу электродвигателя более плавной.
По способу подачи питания:
- статорные – классические модели, в которых рабочие обмотки устанавливают на статор;
- роторные – рабочие обмотки помещаются на вращающемся элементе, широкое применение на практике получили асинхронные двигатели Шраге-Рихтера.
Способы пуска и схемы подключения
Асинхронный электродвигатель с короткозамкнутым ротором обладает низкой себестоимостью, большими пусковыми токами и низким усилием на старте. Поэтому для различных целей могут применять различные способы пуска, снижающие бросок тока в обмотках и улучшающие рабочие характеристики:
- прямой – напряжение на электродвигатель подается через пускатели или контакторы;
- переключение схемы соединения обмоток электродвигателя со звезды на треугольник;
- понижение напряжения;
- плавный пуск;
- изменение частоты питающего напряжения.
Однофазного асинхронного двигателя.
Для асинхронного однофазного электродвигателя могут использоваться три основных способа пуска:
Трехфазного асинхронного двигателя.

Трехфазные асинхронные агрегаты могут подключаться такими способами:
- Напрямую в цепь через пускатель или контактор, что обеспечивает простоту процесса, но формирует максимальные токи. Этот способ не подходит в случае больших механических нагрузок на вал.
- Переключением схемы со звезды на треугольник – применяется для снижения токов в обмотках электродвигателя за счет уменьшения питающего напряжения с линейного на фазное.
- Путем подключения через преобразователь напряжения, реостаты или автотрансформатор для снижения разности потенциалов. Также используется изменение числа пар полюсов, частоты питающего напряжения и прочие.
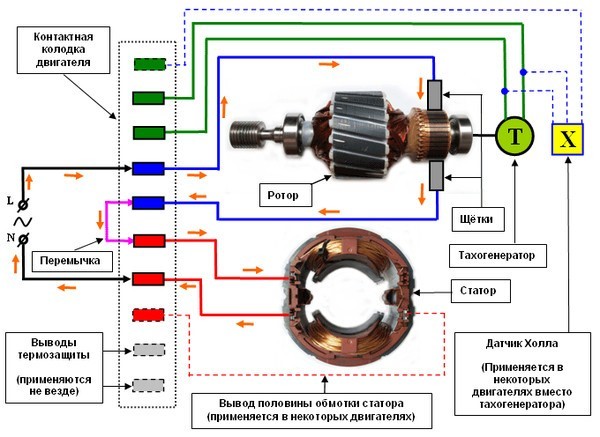
Помимо этого трехфазные асинхронные двигатели могут использовать прямую и реверсивную схему включения в цепь. Первый вариант применяется только для вращения вала электродвигателя в одном направлении. В реверсивной схеме можно переключать движение рабочего органа в прямом и обратном направлении.

Рис. 9: прямая схема без возможности реверсирования
Рассмотрим нереверсивную схему пуска асинхронного электродвигателя (рисунок 9). Здесь, через трехполюсный автомат QF1 питание подается на пускатель KM1. При нажатии кнопки SB2 произойдет подача напряжения на обмотки электродвигателя, его остановка осуществляется кнопкой SB1. Тепловое реле KK1 применяется для контроля температуры нагрева, а лампочка HL1 сигнализирует о включенном состоянии контактора.

Рисунок 10: схема прямого включения с реверсом
Реверсивная схема (смотрите рисунок 10) устроена аналогичным образом, но в ней используются два пускателя KM1 и KM2. Прямое включение асинхронного электродвигателя производиться кнопкой SB2, а обратное SB3.
Применение
Область применения асинхронных электродвигателей охватывает достаточно большой сегмент хозяйственной деятельности человека. Поэтому их можно встретить в различных типах станочного оборудования – токарных, шлифовальных, фрезерных, прокатных и т.д. В работе грузоподъемных кранов, талей, тельферов и прочих механизмов.
Их используют для лифтов, горнодобывающей техники, землеройного оборудования, эскалаторов, конвейеров. В быту их можно встретить в вентиляторах, микроволновках, хлебопечках и прочих вспомогательных устройствах. Такая популярность асинхронных электродвигателей обусловлена их весомыми преимуществами.
Преимущества и недостатки
К преимуществам асинхронных электродвигателей, в сравнении с другими типами электрических машин следует отнести:
- Относительно меньшая стоимость, в сравнении с другими типами электродвигателей, за счет простоты конструкции;
- Высокая степень надежности, благодаря отсутствию вспомогательных элементов редко выходят со строя;
- Способны выносить кратковременные перегрузки;
- Могут включаться в цепь напрямую без использования дополнительного оборудования;
- Низкие затраты на содержание в ходе эксплуатации.
Основными недостатками асинхронного электродвигателя являются относительно большие пусковые токи и слабый пусковой момент, что в определенной степени ограничивает сферу прямого включения. Также асинхронные электродвигатели обладают низким коэффициентом мощности и сильно зависят от параметров питающего напряжения.
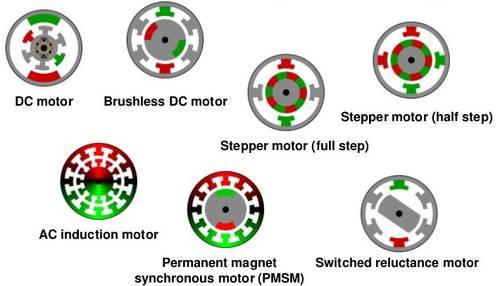
В прошлых статьях был рассмотрен принцип работы синхронного и асинхронного электродвигателей, а также рассказано, как ими управлять. Но видов электродвигателей существует гораздо больше! И у каждого из них свои свойства, область применения и особенности.
В этой статье будет небольшой обзор по разным типам электродвигателей с фотографиями и примерами применений. Почему в пылесос ставятся одни двигатели, а в вентилятор вытяжки другие? Какие двигатели стоят в сегвее? А какие двигают поезд метро?

С этим двигателем все должны быть знакомы с детства, потому что именно этот тип двигателя стоит в большинстве старых игрушек. Батарейка, два проводка на контакты и звук знакомого жужжания, вдохновляющего на дальнейшие конструкторские подвиги. Все ведь так делали? Надеюсь. Иначе эта статья, скорее всего, не будет вам интересна. Внутри такого двигателя на валу установлен контактный узел – коллектор, переключающий обмотки на роторе в зависимости от положения ротора. Постоянный ток, подводимый к двигателю, протекает то по одним, то по другим частям обмотки, создавая вращающий момент. Кстати, не уходя далеко, всех ведь, наверное, интересовало – что за желтые штучки стояли на некоторых ДПТ из игрушек, прямо на контактах (как на фото сверху)? Это конденсаторы – при работе коллектора из-за коммутаций потребление тока импульсное, напряжение может также меняться скачками, из-за чего двигатель создает много помех. Они особенно мешают, если ДПТ установлен в радиоуправляемой игрушке. Конденсаторы как раз гасят такие высокочастотные пульсации и, соответственно, убирают помехи.

Почему ДПТ не делают мощнее? Главная проблема всех ДПТ, а в особенности ДПТ большой мощности – это коллекторный узел. Скользящий контакт сам по себе является не очень хорошей затеей, а скользящий контакт на киловольты и килоамперы – и подавно. Поэтому конструирование коллекторного узла для мощных ДПТ – целое искусство, а на мощности выше мегаватта сделать надежный коллектор становится слишком сложно (рекорд — 12,5МВт).
В потребительском качестве ДПТ хорош своей простотой с точки зрения управляемости. Его момент прямо пропорционален току якоря, а частота вращения (по крайней мере холостой ход) прямо пропорциональна приложенному напряжению. Поэтому до наступления эры микроконтроллеров, силовой электроники и частотного регулируемого привода переменного тока именно ДПТ был самым популярным электродвигателем для задач, где требуется регулировать частоту вращения или момент.
Также нужно упомянуть, как именно в ДПТ формируется магнитный поток возбуждения, с которым взаимодействует якорь (ротор) и за счет этого возникает вращающий момент. Этот поток может делаться двумя способами: постоянными магнитами и обмоткой возбуждения. В небольших двигателях чаще всего ставят постоянные магниты, в больших – обмотку возбуждения. Обмотка возбуждения – это еще один канал регулирования. При увеличении тока обмотки возбуждения увеличивается её магнитный поток. Этот магнитный поток входит как в формулу момента двигателя, так и в формулу ЭДС. Чем выше магнитный поток возбуждения, тем выше развиваемый момент при том же токе якоря. Но тем выше и ЭДС машины, а значит при том же самом напряжении питания частота вращения холостого хода двигателя будет ниже. Зато если уменьшить магнитный поток, то при том же напряжении питания частота холостого хода будет выше, уходя в бесконечность при уменьшении потока возбуждения до нуля. Это очень важное свойство ДПТ. Вообще, я очень советую изучить уравнения ДПТ – они простые, линейные, но их можно распространить на все электродвигатели – процессы везде схожие.

Еще более распространенным, чем коллекторные двигатели, является асинхронный двигатель. Только распространен он в основном в промышленности – где присутствует трехфазная сеть. Про принцип его работы написана отдельная статья. Если кратко, то его статор – это распределенная двухфазная или трехфазная (реже многофазная) обмотка. Она подключается к источнику переменного напряжения и создает вращающееся магнитное поле. Ротор можно представлять себе в виде медного или алюминиевого цилиндра, внутри которого находится железо магнитопровода. К ротору в явном виде напряжение не подводится, но оно индуцируется там за счет переменного поля статора (поэтому двигатель на английском языке называют индукционным). Возникающие вихревые токи в короткозамкнутом роторе взаимодействуют с полем статора, в результате чего образуется вращающий момент.
Минус асинхронного двигателя по сравнению с ДПТ в том, что его сложно регулировать. Асинхронный электродвигатель – это двигатель переменного тока. Если асинхронному двигателю просто понизить напряжение, не понизив частоту, то он несколько снизит скорость, да. Но у него увеличится так называемое скольжение (отставание частоты вращения от частоты поля статора), увеличатся потери в роторе, из-за чего он может перегреться и сгореть. Можно представлять это себе как регулирование скорости движения легкового автомобиля исключительно сцеплением, подав полный газ и включив четвертую передачу. Чтобы правильно регулировать частоту вращения асинхронного двигателя нужно пропорционально регулировать и частоту, и напряжение. А лучше и вовсе организовать векторное управление, как более подробно было описано в прошлой статье. Но для этого нужен преобразователь частоты – целый прибор с инвертором, микроконтроллером, датчиками и т.п. До эры силовой полупроводниковой электроники и микропроцессорной техники (в прошлом веке) регулирование частотой было экзотикой – его не на чем было делать. Но сегодня регулируемый асинхронный электропривод на базе преобразователя частоты – это уже стандарт-де-факто.

Про принцип работы синхронного двигателя также была отдельная статья. Синхронных приводов бывает несколько подвидов – с магнитами (PMSM) и без (с обмоткой возбуждения и контактными кольцами), с синусоидальной ЭДС или с трапецеидальной (бесколлекторные двигатели постоянного тока, BLDC). Сюда же можно отнести некоторые шаговые двигатели. До эры силовой полупроводниковой электроники уделом синхронных машин было применение в качестве генераторов (почти все генераторы всех электростанций – синхронные машины), а также в качестве мощных приводов для какой-либо серьезной нагрузки в промышленности.

Конструктивно это самый простой двигатель и по принципу действия похож на некоторые шаговые двигатели. Ротор – зубчатая железка. Статор – тоже зубчатый, но с другим числом зубцов. Проще всего принцип работы поясняет вот эта анимация:
Следующая проблема – это пульсации вращающего момента. В силу зубчатой структуры и импульсного тока момент редко получается стабильным – чаще всего он пульсирует. Это несколько ограничивает применимость двигателей для транспорта – кому хочется иметь пульсирующий момент на колесах? Кроме того, от таких импульсов тянущего усилия не очень хорошо себя чувствуют подшипники двигателя. Проблема несколько решается специальным профилированием формы тока фазы, а также увеличением количества фаз.
Это совсем другой тип двигателя, отличающийся по принципу действия от обычного ВИД. Исторически известны и широко используются вентильно-индукторные генераторы такого типа, применяемые на самолетах, кораблях, железнодорожном транспорте, а вот именно двигателями такого типа почему-то занимаются мало.
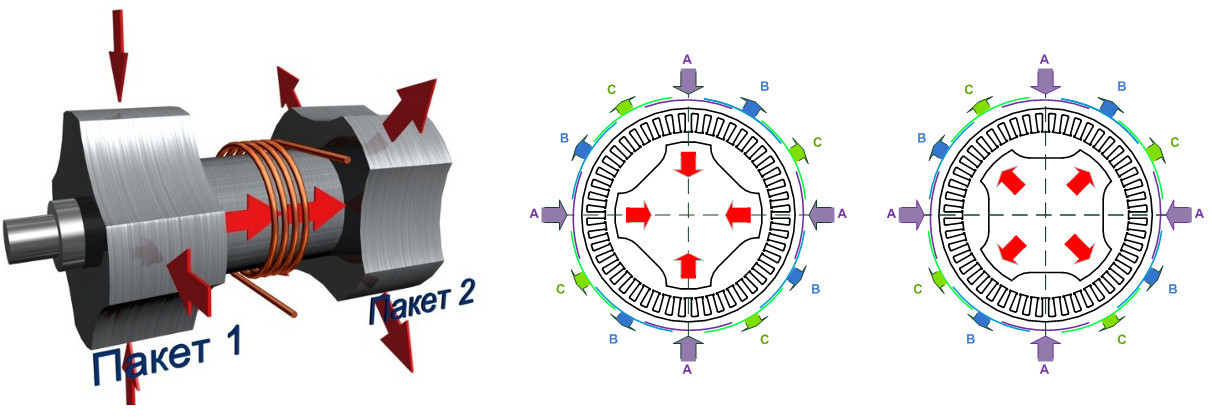
На рисунке схематично показана геометрия ротора и магнитный поток обмотки возбуждения, а также изображено взаимодействие магнитных потоков статора и ротора, при этом ротор на рисунке установлен в согласованное положение (момент равен нулю).
Упрощенно принцип работы можно описать следующим образом: ротор стремится повернуться в такое положение, при котором направления магнитного потока в статоре (от токов статора) и роторе (от тока возбуждения) совпадут. При этом половина электромагнитного момента образуется в одном пакете, а половина – в другом. Со стороны статора машина подразумевает разнополярное синусоидальное питание (ЭДС синусоидальна), электромагнитный момент активный (полярность зависит от знака тока) и образован за счет взаимодействия поля, созданного током обмотки возбуждения с полем, созданного обмотками статора. По принципу работы эта машина отлична от классических шаговых и SRD двигателей, в которых момент реактивный (когда металлическая болванка притягивается к электромагниту и знак усилия не зависит от знака тока электромагнита).

Кроме того, ВИД НВ можно создавать многофазным и многосекционным, аналогично тому, как это делается в ВИД СВ. При этом фазы оказываются несвязанными друг с другом магнитными потоками и могут работать независимо. Т.е. получается как будто бы несколько трехфазных машин в одной, к каждой из которых присоединяется свой независимый инвертор с векторным управлением, а результирующая мощность просто суммируется. Координации между преобразователями при этом не требуется никакой – только общее задание частоты вращения.
Минусы этого двигателя тоже есть: напрямую от сети он крутиться не может, так как, в отличие от классических синхронных машин, ВИД НВ не имеет асинхронной пусковой обмотки на роторе. Кроме того, он сложнее по конструкции, чем обычный ВИД СВ (SRD).

К сожалению, двумя словами здесь не обойтись. И общими выводами про то, что у каждого двигателя свои достоинства и недостатки – тоже. Потому что не рассмотрены самые главные качества – массогабаритные показатели каждого и типов машин, цена, а также их механические характеристики и перегрузочная способность. Оставим нерегулируемый асинхронный привод крутить свои насосы напрямую от сети, тут ему конкурентов нет. Оставим коллекторные машины крутить дрели и пылесосы, тут с ними в простоте регулирования тоже потягаться сложно.
Давайте рассмотрим регулируемый электропривод, режим работы которого – длительный. Коллекторные машины здесь сразу исключаются из конкуренции по причине ненадежности коллекторного узла. Но остались еще четыре – синхронный, асинхронный, и два типа вентильно-индукторных. Если мы говорим о приводе насоса, вентилятора и чего-то похожего, что используется в промышленности и где масса и габариты особо не важны, то здесь из конкуренции выпадают синхронные машины. Для обмотки возбуждения требуются контактные кольца, что является капризным элементом, а постоянные магниты очень дороги. Конкурирующими вариантами остаются асинхронный привод и вентильно-индукторные двигатели обоих типов.
Если синхронная машина в три раза меньше и легче – это не значит, что для электротяги она подходит лучше. Всё дело в отсутствии регулировки потока постоянных магнитов. Поток магнитов определяет ЭДС машины. На определенной частоте вращения ЭДС машины достигает напряжения питания инвертора и дальнейшее повышение частоты вращения становится затруднительно. Тоже самое касается и повышения момента. Если нужно реализовать больший момент, в синхронной машине нужно повышать ток статора – момент возрастет пропорционально. Но более эффективно было бы повысить и поток возбуждения – тогда и магнитное насыщение железа было бы более гармоничным, а потери были бы ниже. Но опять же поток магнитов повышать мы не можем. Более того, в некоторых конструкциях синхронных машин и ток статора нельзя повышать сверх определенной величины – магниты могут размагнититься. Что же получается? Синхронная машина хороша, но только лишь в одной единственной точке – в номинальной. С номинальной частотой вращения и номинальным моментом. Выше и ниже – всё плохо. Если это нарисовать, то получится вот такая характеристика частоты от момента (красным):


Поэтому синхронная машина хороша там, где большого диапазона регулирования не требуется. Например, в сегвее, где скорость с точки зрения безопасности может быть ограничена на 30км/ч (или сколько там у него?). А еще синхронная машина идеальна для вентиляторов: у вентилятора сравнительно мало изменяется частота вращения, от силы раза в два – больше особо нет смысла, так как воздушный поток ослабевает пропорционально квадрату скорости (примерно). Поэтому для небольших пропеллеров и вентиляторов синхронная машина – это то, что нужно. И как раз она туда, собственно, успешно ставится.
Тяговую кривую, изображенную на рисунке синим цветом, испокон веков реализуют двигатели постоянного тока с регулируемым возбуждением: когда ток обмотки возбуждения изменяют в зависимости от тока статора и частоты вращения. При увеличении частоты вращения уменьшается и ток возбуждения, позволяя машине разгоняться выше и выше. Поэтому ДПТ с независимым (или смешанным) управлением возбуждением классически стоял и до сих пор стоит в большинстве тяговых применений (метро, трамваи и т.п.). Какая же электрическая машина переменного тока может с ним поспорить?
А теперь ВИПы. Что могут они? Какая тяговая характеристика у них? Про ВИД СВ я точно сказать не могу – это по своему принципу работы нелинейный двигатель, и от проекта к проекту его механическая характеристика может сильно меняться. Но в целом он скорее всего лучше асинхронного двигателя в плане приближения к желаемой тяговой характеристике с постоянством мощности. А вот про ВИД НВ я могу сказать подробнее, так как мы на фирме им очень плотно занимаемся. Видите вон ту желаемую тяговую характеристику на рисунке выше, которая нарисована синим цветом, к которой мы хотим стремиться? Это на самом деле не просто желаемая характеристика. Это реальная тяговая характеристика, которую мы по точкам по датчику момента сняли для одного из ВИД НВ. Так как ВИД НВ имеет независимое внешнее возбуждение, то его качества наиболее приближены к ДПТ НВ, который тоже может сформировать такую тяговую характеристику за счет регулирования возбуждения.
Так что же лучше всего в итоге для электротяги? Какой двигатель самый лучший?
Понятия не имею. Все плохие. Надо изобретать дальше. Но мораль статьи такова – если вы хотите сравнить между собой разные типы регулируемого электропривода, то нужно сравнивать на конкретной задаче с конкретной требуемой механической характеристикой по всем-всем параметрам, а не просто по мощности. Также в этой статье не рассмотрены еще куча нюансов сравнения. Например, такой параметр как длительность работы в каждой из точек механической характеристики. На максимальном моменте обычно ни одна машина не может работать долго – это режим перегрузки, а на максимальной скорости очень плохо себя чувствуют синхронные машины с магнитами – там у них огромные потери в стали. А еще интересный параметр для электротяги – потери при движении выбегом, когда водитель отпустил газ. Если ВИПы и асинхронные двигатели будут крутиться как болванки, то у синхронной машины с постоянными магнитами останутся почти номинальные потери в стали из-за магнитов. И так далее, и так далее…
Поэтому нельзя вот так просто взять и выбрать лучший электропривод.
UPD:
Обобщая замечания в комментариях, необходимо дополнить некоторые важные, как оказалось, вещи, которые я изначально опустил как маловажные.
1. Асинхронные двигатели до эры преобразователей частоты регулировали за счет применения так называемого фазного ротора — когда ротор делался в виде обмотки, а не беличьей клетки, а через контактные кольца (как у синхронной машины) фазы ротора выводились наружу. Включая в цепь ротора резисторы можно было мягко пускать АД и безопасно регулировать частоту вращения, изменяя сопротивление. Проблема в том, что очень много энергии при этом терялось в резисторах — иногда до половины от подводимой к приводу мощности.
2. В статье не упомянуты синхронные реактивные машины и их совмещение с синхронными машинами с постоянными магнитами. Если сделать ротор синхронной машины с магнитами явнополюсным — например таким, как нарисован ротор SRD двигателя на gif анимации, то развиваемый момент может быть не только активным, но и реактивным — как у SRD. Подбирая оптимальное сочетание активного и реактивного момента можно частично исключить проблемы классической синхронной машины с магнитами, значительно расширив диапазон работы с постоянством мощности. Получается некий гибрид реактивной машины и синхронной с магнитами.
Одним из наиболее распространенных типов электрических машин в мире является асинхронный электродвигатель. За счет высокой надежности и неприхотливости в работе такие агрегаты получили широкое распространение в самых различных отраслях промышленности и сельского хозяйства, они помогают решать бытовые и общепроизводственные задачи любой сложности. Поэтому в данной статье мы детально рассмотрим особенности асинхронных двигателей.
Устройство
Конструктивно простейшая асинхронная машина представляет собой рамку, вращающуюся в переменном магнитном поле. Однако на практике данная модель носит скорее ознакомительный характер и практического применения в промышленности не имеет. Поэтому на рисунке 1 ниже мы рассмотрим устройство действующей модели асинхронного электродвигателя.
Рис. 1. Устройство асинхронного электродвигателя
Весь двигатель располагается в корпусе станины 7, ее основная задача состоит в обеспечении достаточной механической прочности, способной выдерживать достаточные усилия. Поэтому чем выше мощность агрегата, тем большей прочностью должна обладать станина и корпус.
Внутрь корпуса устанавливается сердечник статора 3, выступающий в роли магнитного проводника для силовых линий рабочего поля. С целью уменьшения потерь в стали магнитопровод выполняется наборным из шихтованных листов, однако в ряде моделей применяется и монолитный вариант.
В пазы сердечника статора укладывается обмотка 2, предназначенная для пропуска электрического тока и формирования ЭДС. Число обмоток будет зависеть от количества пар полюсов на каждую фазу. Также в части уложенных обмоток электродвигатели подразделяются на:
- трехфазные;
- двухфазные;
- однофазные.
Внутри статора располагается подвижный элемент – ротор 6. По конструкции ротор может быть короткозамкнутым или фазным, на рисунке приведен первый вариант. В состав ротора входит сердечник 5, также набранный из шихтованной стали и беличья клетка 4. Вся конструкция насажена на металлический вал 1, передающий вращение и механическое усилие.
Принцип работы
Заключается в формировании электромагнитного поля вокруг проводника, по которому протекает электрический ток. Для асинхронного электродвигателя данный процесс начинается сразу после подачи напряжения на обмотки статора, после чего в роторе наводится ЭДС взаимоиндукции, индуцирующей вихревые токи в металлическом каркасе. Наличие вихревых токов обуславливает генерацию собственной ЭДС, которая формирует электромагнитное поле ротора. Наиболее эффективный КПД асинхронной электрической машины получается при работе от трехфазной сети.
Конструктивно обмотки статора имеют смещение в пространстве друг относительно друга на 120°, что показано на рисунке 2 ниже:
Рис. 2. Геометрическое смещение фаз в статоре
Такой прием позволяет отстроить магнитное поле рабочих обмоток в строгом соответствии с напряжением трехфазной сети, которое имеет аналогичную разность кривых электрической величины.
Рис. 3. Принцип формирования магнитного потока асинхронного двигателя
На рисунке 3 выше все три фазы изображены в разных цветах для упрощения понимания процесса, также здесь изображена кривая токов, протекающих в фазах асинхронного электродвигателя. Теперь рассмотрим физические процессы в обмотках двигателя для трех позиций показанных на рисунке:
- I – в этой позиции максимальный ток протекает в красной обмотке электродвигателя, а значение силы тока в желтой и синей равны. Основной поток силовых линий формируется красной фазой, а два других дополняют его.
- II – в данной точке желтая синусоида равна нулю, поэтому никакого потока не создает, а сила тока красной и синей равны. Поток формируется сразу двумя фазами и смещается по часовой стрелке вправо, совершая поворот.
- III – третья точка характеризуется максимумом токовой нагрузки для синей кривой, а красная и желтая имеет равную амплитуду, но противоположную по направлению. В результате чего максимум магнитных линий южного и северного полюса сместиться еще на 30°.
По данному принципу магнитное поле статора вращается в асинхронной электрической машине в течении периода. За счет магнитного взаимодействия с полем статора асинхронного электродвигателя происходит поступательное движение ротора вокруг своей оси. Можно сказать, что ротор пытается догнать поле статора. Именно за счет разницы во вращении полей данный тип электрической машины получил название асинхронной.
Отличие от синхронного двигателя
Наряду с простыми асинхронными электрическими машинами в промышленности также используются и синхронные агрегаты. Основным отличием синхронного двигателя является наличие вспомогательной обмотки на роторе, предназначенной для создания постоянного магнитного потока, что показано на рисунке 4 ниже.
Рис. 4. Отличие асинхронного от синхронного электродвигателя
Эта обмотка создает магнитный поток, не зависящий от наличия электродвижущей силы в обмотках статора электродвигателя. Поэтому при возбуждении синхронного электродвигателя его вал начинает вращаться одновременно с полем статора. В отличии от асинхронного типа, где существует разница в движении, которая физически выражается как скольжение и рассчитывается по формуле:
где s – это величина скольжения, измеряемая в процентах, n1 – частота, с которой вращается поле статора, n2 – частота, с которой вращается ротор.
Синхронные электродвигатели применяются в тех устройствах, где важно соблюдать высокую точность синхронизации подачи питания и начала движения. Также они обеспечивают сохранение рабочих характеристик в момент пуска.
На практике существует огромное количество разновидностей асинхронных электродвигателей, отличающихся как сферой применения, так и мощностью согласно ГОСТ 12139-84 . В связи с тем, что все вариации перечислить невозможно, мы рассмотрим наиболее значимые критерии, по которым асинхронные аппараты разделяются на виды.
По количеству питающих фаз выделяют:
- трехфазные – используются в сетях, где есть возможность подключиться сразу ко всем фазам, но в частных случаях могут запускаться и в однофазной сети;
- двухфазные – применяются во многих бытовых приборах, состоят из двух рабочих обмоток, одна из которых питается напряжением сети, а вторая подключается через фазосдвигающий конденсатор.
- однофазные – как и предыдущая модель содержат две обмотки, одна из которых рабочая, а вторая пусковая.
По типу ротора различают:
- с короткозамкнутым ротором – имеет тяжелый пуск, но и меньшую стоимость;
- с фазным ротором – на роторе устанавливается вспомогательная обмотка, делающая работу электродвигателя более плавной.
По способу подачи питания:
- статорные – классические модели, в которых рабочие обмотки устанавливают на статор;
- роторные – рабочие обмотки помещаются на вращающемся элементе, широкое применение на практике получили асинхронные двигатели Шраге-Рихтера.
Способы пуска и схемы подключения
Асинхронный электродвигатель с короткозамкнутым ротором обладает низкой себестоимостью, большими пусковыми токами и низким усилием на старте. Поэтому для различных целей могут применять различные способы пуска, снижающие бросок тока в обмотках и улучшающие рабочие характеристики:
- прямой – напряжение на электродвигатель подается через пускатели или контакторы;
- переключение схемы соединения обмоток электродвигателя со звезды на треугольник;
- понижение напряжения;
- плавный пуск;
- изменение частоты питающего напряжения.
Однофазного асинхронного двигателя.
Для асинхронного однофазного электродвигателя могут использоваться три основных способа пуска:
Трехфазного асинхронного двигателя.
Трехфазные асинхронные агрегаты могут подключаться такими способами:
- Напрямую в цепь через пускатель или контактор, что обеспечивает простоту процесса, но формирует максимальные токи. Этот способ не подходит в случае больших механических нагрузок на вал.
- Переключением схемы со звезды на треугольник – применяется для снижения токов в обмотках электродвигателя за счет уменьшения питающего напряжения с линейного на фазное.
- Путем подключения через преобразователь напряжения, реостаты или автотрансформатор для снижения разности потенциалов. Также используется изменение числа пар полюсов, частоты питающего напряжения и прочие.
Помимо этого трехфазные асинхронные двигатели могут использовать прямую и реверсивную схему включения в цепь. Первый вариант применяется только для вращения вала электродвигателя в одном направлении. В реверсивной схеме можно переключать движение рабочего органа в прямом и обратном направлении.
Рис. 9: прямая схема без возможности реверсирования
Рассмотрим нереверсивную схему пуска асинхронного электродвигателя (рисунок 9). Здесь, через трехполюсный автомат QF1 питание подается на пускатель KM1. При нажатии кнопки SB2 произойдет подача напряжения на обмотки электродвигателя, его остановка осуществляется кнопкой SB1. Тепловое реле KK1 применяется для контроля температуры нагрева, а лампочка HL1 сигнализирует о включенном состоянии контактора.
Рисунок 10: схема прямого включения с реверсом
Реверсивная схема (смотрите рисунок 10) устроена аналогичным образом, но в ней используются два пускателя KM1 и KM2. Прямое включение асинхронного электродвигателя производиться кнопкой SB2, а обратное SB3.
Применение
Область применения асинхронных электродвигателей охватывает достаточно большой сегмент хозяйственной деятельности человека. Поэтому их можно встретить в различных типах станочного оборудования – токарных, шлифовальных, фрезерных, прокатных и т.д. В работе грузоподъемных кранов, талей, тельферов и прочих механизмов.
Их используют для лифтов, горнодобывающей техники, землеройного оборудования, эскалаторов, конвейеров. В быту их можно встретить в вентиляторах, микроволновках, хлебопечках и прочих вспомогательных устройствах. Такая популярность асинхронных электродвигателей обусловлена их весомыми преимуществами.
Преимущества и недостатки
К преимуществам асинхронных электродвигателей, в сравнении с другими типами электрических машин следует отнести:
- Относительно меньшая стоимость, в сравнении с другими типами электродвигателей, за счет простоты конструкции;
- Высокая степень надежности, благодаря отсутствию вспомогательных элементов редко выходят со строя;
- Способны выносить кратковременные перегрузки;
- Могут включаться в цепь напрямую без использования дополнительного оборудования;
- Низкие затраты на содержание в ходе эксплуатации.
Основными недостатками асинхронного электродвигателя являются относительно большие пусковые токи и слабый пусковой момент, что в определенной степени ограничивает сферу прямого включения. Также асинхронные электродвигатели обладают низким коэффициентом мощности и сильно зависят от параметров питающего напряжения.
Читайте также: