
Стенд для проверки шаговых двигателей своими руками
Добавил пользователь Евгений Кузнецов Обновлено: 04.10.2024
У меня много различной оргтехники, которая вышла из строя. Выбрасывать я её не решаюсь, а вдруг пригодится. Из её частей возможно сделать что-нибудь полезное.
К примеру: шаговый двигатель, который так распространен, обычно используется самодельщиками как мини генератор для фонарика или ещё чего. Но я практически никогда не видел, чтобы его использовали именно как двигатель для преобразования электрической энергии в механическую. Оно и понятно: для управления шаговым двигателем нужна электроника. Его просто так к напряжению не подключишь.
И как оказалось - я ошибался. Шаговый двигатель от принтера или ещё от какого устройства, довольно просто запустить от переменного тока.
Я взял вот такой двигатель.
Обычно у них четыре вывода, две обмотки. В большинстве случаем, но есть и другие конечно. Я рассмотрю самый ходовой.
Схема шагового двигателя
- Конденсатор емкостью 470-3300 мкФ.
- Источник переменного тока 12 В.
Подключаем конденсатор одним выводом к середине обмоток, а вторым выводом в источнику питания на любой выход. Фактически конденсатор будет параллелен одной из обмоток.
Если перекинуть вывод конденсатора с одного выхода питания на другой, то вал двигателя начнет вращаться в другую сторону.
Все предельно просто. А принцип работы этого всего очень прост: конденсатор формирует сдвиг фаз на одной из обмоток, в результате обмотки работают почти попеременно и шаговый двигатель крутится.
Очень жалко то, что обороты двигателя невозможно регулировать. Увеличение или уменьшение питающего напряжения ни к чему не приведет, так как обороты задаются частотой сети.
Хотелось бы добавить, что в данном примере используется конденсатор постоянного тока, что является не совсем правильным вариантом. И если вы решитесь использовать такую схему включения, берите конденсатор переменного тока. Его так же можно сделать самому, включив два конденсатора постоянного тока встречно-последовательно.
Сморите видео

Спецификация: C 1 - 15 пФ, C 2 ‑ 8 – 30 пФ, C 3 ‑ 0 , 1 мкФ, C 4 ‑ 0 , 047 мкФ, C 5 - 470 ґ 25 В, C 6 ‑ 0 , 1 мкФ, C 7 - 2200 x 25 В, R 1 ‑ 4 , 7 – 6 , 8 МОм, R 2 - 130 кОм, R 3 - 100 кОм, R 4 - 10 кОм, R 5 - 10 кОм, R 6 - 1 МОм, R 7 ‑ 1 , 2 кОм, R 8 - 130 Ом, R 9 - 220 Ом, R 10 ‑ 0 , 2 – 0 , 25 Ом, R 11 - 470 Омб L 1 - 200 мкГн, Z 1 - 400 кГц ( 50 – 800 кГц)
DD 1 ,DD 2 -К 561 ИЕ 16 , DD 3 -К 561 ТМ 2 , DD 4 -К 561 ЛЕ 5 , VD 2 -КД 212 , VD 1 -КД 521 , VD 3 -КД 213 , VT 1 -КТ 3117 , VT 2 -КТ 817 , VT 3 -КТ 3102
ТЕСТЕР ФОРСУНОК НА КР 1006 ВИ 1
© UKR-VLAD

Еще один вариант, присланный Владимиром, aka UKR-VLAD, из-за рубежа, с Украины.
D 1 ,D 2 -КР 1006 ВИ 1 . D 1 -ФОРМИРОВАТЕЛЬ длительности пачки (регулируется R 1 ) D 2 -длительность импульса на форсунке (примерно 5 ms. регулируется R 2 ). П 1 ‑я сделал из 4 ‑х мп (удобно – можно задать любую комбинацию)
Для запуска необходимо:
1 .Соединить разъем форсунок с тестером
2 .Подать питание на тестер
3 .Выбрать номер форсунки или несколько
4 .Нажать и отпустить кнопку (не более 1 сек.)
Тестер выполнен по минимуму. но все необходимое выполняет и достаточно стабилен.
Прибор для имитации сигналов ДПКВ
© Михаил Уханов. Ростов

Краткое описание схемы: На элементах D 1 . 1 ‚D 1 . 2 собран генератор с изменяемой частотой, так как выход с генератора имеет несимметричный меандр, далее стоит элемент D 2 . 1 который делит частоту на 2 и формирует правильный сигнал. Сигнал поступает на счётчик D 3 , счётчик имеет набранный коэффициент деления 60 , выходной импульс со счётчика поступает на триггер защёлку D 2 . 2 и сбрасывает его выход, чем запрещает счёт на элементе D 1 . 3 . Так как длительность импульса на выходе счётчика равна одному такту, мы имеем сброшенный выход триггера на два такта. И при следующем положительном фронте устанавливаем выход триггера в единицу, тем самым разрешаем счёт на выходе D 1 . 3 . Далее сигнал поступает на транзистор, и формируется неполярный сигнал со счётом 58 импульсов 2 пропуска.
Схема проверена на ЯНВАРЕ 5 . 1 . 1 . Количество оборотов имитированных схемой от 240 до 10200 об/мин. При этом без ошибок по датчику коленчатого вала.
Рекомендации: резистор регулировки частоты желательно ставить логарифмический, счётчик К 564 ИЕ 15 можно заменить на два счётчика К 561 ИЕ 8 немного подправив схему.
Программа тестер МЗ для систем Bosch M 1 . 5 . 4
© Mobil (Юрий)
Программа предназначена для тестирования модулей зажигания. Программа зашивается в ПЗУ, ПЗУ устанавливается на время тестирования в ЭБУ на место штатной. На высоковольтные провода устанавливаются заземленные разрядники. Не забывайте соблюдать осторожность при работе с высоким напряжением! После включения зажигания лампочка СЕ начинает мигать, при нажатии на педаль газа, ЭБУ начинает формировать управляющие сигналы на модуль зажигания длительностью 2 . 8 мС, на разрядниках должна появится искра. Частота искрообразования зависит от степени нажатия педали газа, чем сильнее нажата педаль тем выше частота. Во время искрообразования лампочка СЕ горит постоянно.
Частоту искрообразования переведенную в обороты двигателя ориентировочно можно оценить по тахометру. Если отпустить педаль газа, то формирование управляющих сигналов на МЗ прекратится, а лампочка СЕ начнет мигать. Данная программа позволяет оценить работоспособность модуля зажигания не снимая его с автомобиля, так же тестирование
прямо на автомобиле позволяет проверить высоковольтные провода, проводку до МЗ и выходы ЭБУ формирующие управляющие сигналы.
Программу можно зашить не только в 27 С 512 , но и в 27 С 64 , 27 С 128 и 27 С 256 , после програмирования необходимо отогнуть 1 и 27 ножки (чтоб они не вставлялись в панель) и соединить их с 28 ножкой для 27 С 64 , 27 С 128 , для 27 С 256 необходимо отогнуть 1 ногу и
соединить её с 28 .
Тестер для проверки цепи датчика скорости (ДС)
© Олег Братков

Один из способов проверить исправность датчика скорости и его электрических цепей – использовать эмулятор датчика скорости. Можно конечно подключить другой, контрольный ДС, и крутя его вал, попросить помощника или водителя последить за стрелкой на панели приборов – дёргается ли? Ну ещё есть варианты…
Проверка РХХ

У РХХ две электромагнитные обмотки, которые не связаны между собой. Одна обмотка – движение иглы вперёд, другая – соответственно назад. Перемещение иглы на один шаг происходит в момент подачи на обмотку питания, следующий шаг перемещения – подача питания в обратной полярности на ту же обмотку.
Нажатие и отпускание кнопки S 2 приводит к перемещению иглы, положение переключателя S 1 задает направление перемещения. Подозреваю, что в механизме РХХ использован анкерный принцип. © Олег Кравчук aka Ol- 102 iL
И, наконец, тестер РХХ от ALMI
Тестер предназначен для проверки исправности регулятора холостого хода с шаговым двигателем (далее – РХХ), устанавливаемого на автомобилях ВАЗ.
1 . При включении питания происходит инициализация РХХ, для этого выполняется 255 шагов в сторону задвигания штока, затем 70 шагов в сторону выдвигания. Эта логика является обратной к нормальной работе РХХ в составе дроссельного патрубка, так как выдвижение штока на 255 шагов недопустимо в том случае, если РХХ снят с ДП (шток может выйти из зацепления и выскочить вместе с пружиной).
2 . После инициализации прибор готов к работе. Нажатие кнопок “выдвинуть шток” и “задвинуть шток” приводит к соответствующим действиям. При выдвижении штока будьте внимательны, он может выйти из зацепления и выскочить вместе с пружиной!
3 . Непрерывный тест. Если нажать обе кнопки одновременно и ужерживать их более 3 сек., то прибор начнет периодическое задвигание и выдвигание штока на 255 шагов. Для прекращения теста нажмите любую кнопку.
4 . С помощью потенциометра возможна регулировка скорости перемещения штока РХХ.

Пояснения к схеме:
1 . Стабилизатор на 5 вольт LM 7805 можно заменить на любой другой, в том числе, в корпусе TO- 92 ( 78 L 05 ), так как потребляемый микроконтроллером ток очень небольшой.
2 . Конденсатор в цепи 1 ‑й ноги ATTINY 12 лучше использовать пленочного типа, так как керамические конденсаторы такой емкости обладают значительным ТКЕ (емкость сильно зависит от температуры).
3 . Драйвер РХХ можно использовать TLE 4728 G или TLE 4729 G. В зависимости от типа драйвера используйте соответствующий тип управляющей программы! Драйвер TLE 4728 G можно взять из неисправного ЭБУ Bosch MP 7 . 0 , драйвер TLE 4729 G – из ЭБУ Январь‑ 5 .
4 . Микроконтроллер ATTINY 12 L необходимо запрограммировать (прошить) перед установкой в схему.
Прошивка и описание внутри архива. СКАЧАТЬ
Акустический тестер ДПДЗ
ШТУЦЕР для манометра, для проверки давления топлива в рампе.
По многочисленным просьбам помещаем чертеж штуцера для подключения манометра к рампе. Чертеж выполнен и любезно предоставлен Hass & Dodgev. Для уплотнения используется любая подходящая резиновая трубка наружным диаметром 8 и длиной 6 мм. Чертеж, который Вам необходимо распечатать и отнести токарю, находится здесь. Если токарь начнет вдруг Вам втирать, что такой резьбы не бывает, смело разворачивайтесь и идите к другому токарю. В конце – концов найдется спец, который сделает Вам штуцер.
Разъем для подключения диагностического оборудования к автомобилям ВАЗ.
Разборка 55 -контактного разъема ЭБУ.
Сначала надо рассмотреть на фото слева – конструкцию клеммы, а она замысловатая, усилена с двух сторон достаточно упругими плоскими пружинами, так что просто выдернуть провод или подковырнуть одну из пружин бесполезно, всякая попытка сжать одну из них (например, шилом), приводит к тому, что другая пружина еще сильнее закрепляется в посадочном гнезде.
Чтобы облегчить разборку и добычу клемм с проводами разъем надо разобрать, т.е. не только снять защитный кожух, но и отделить верхнюю половины от нижней. При этом могут отломиться боковые держатели, на которых написаны номера клемм. Ничего страшного в этом нет. По окончании процедуры обе половинки разъема и боковые держатели прочно склеиваются обыкновенным японско-китайским супер-клеем (за 2 – 3 руб.). Затем рассмотрите фото готовых щипцов, видно, что конструкция их примитивная. Задача этих щипцов сжать в гнезде обе пружины вместе. Поэтому размеры их подгоняются под посадочное гнездо разъема.
Рано или поздно, при постройке робота, возникнет нужда в точных перемещениях, например, когда захочется сделать манипулятор. Вариантов тут два — сервопривод, с обратными связями по току, напряжению и координате, либо шаговый привод. Сервопривод экономичней, мощней, но при этом имеет весьма нетривиальную систему управления и под силу далеко не всем, а вот шаговый двигатель это уже ближе к реальности.
Шаговый двигатель это, как понятно из его названия, двигатель который вращается дискретными перемещениями . Достигается это за счет хитрой формы ротора и двух (реже четырех) обмоток. В результате чего, путем чередования направления напряжения в обмотках можно добиться того, что ротор будет по очереди занимать фиксированные значения.
В среднем, у шагового двигателя на один оборот вала, приходится около ста шагов. Но это сильно зависит от модели двигателя, а также от его конструкции. Кроме того, существуют полушаговый и микрошаговый режим , когда на обмотки двигателя подают ШИМованное напряжение, заставляющее ротор встать между шагами в равновесном состоянии, которое поддерживается разным уровнем напряжения на обмотках. Эти ухищрения резко улучшают точность, скорость и бесшумность работы, но снижается момент и сильно увеличивается сложность управляющей программы — надо ведь расчитывать напряжения для каждого шага.
Один из недостатков шаговиков, по крайней мере для меня, это довольно большой ток. Так как на обмотки напруга подается все время, а такого явления как противоЭДС в нем, в отличии от коллекторных двигателей, не наблюдается, то, по сути дела, мы нагружаемся на активное сопротивление обмоток, а оно невелико. Так что будь готов к тому, что придется городить мощный драйвер на MOSFET транзисторах или затариваться спец микросхемами.
- Биполярный — имеет четыре выхода, содержит в себе две обмотки.
- Униполярный — имеет шесть выходов. Содержит в себе две обмотки, но каждая обмотка имеет отвод из середины.
- Четырехобмоточный — имеет четыре независимые обмотки. По сути дела представляет собой тот же униполярник, только обмотки его разделены. Вживую не встречал, только в книжках.
Где взять шаговый двигатель.
Вообще шаговики встречаются много где. Самое хлебное место — пятидюймовые дисководы и старые матричные принтеры . Еще ими можно поживиться в древних винчестерах на 40Мб, если, конечно, рука поднимется покалечить такой антиквариат.
А вот в трехдюймовых флопарях нас ждет облом — дело в том, что там шаговик весьма ущербной конструкции — у него только один задний подшипник, а передним концом вал упирается в подшипник закрепленный на раме дисковода. Так что юзать его можно только в родном креплении. Либо городить высокоточную крепежную конструкцию. Впрочем, тебе может повезет и ты найдешь нетипичный флопарь с полноценным движком.
Схема управления шаговым двигателем
Я разжился контроллерами шаговиков L297 и мощным сдвоенным мостом L298N.
Именно на нем был сделан мой первый силовой блок робота. Кроме него там еще два источника питания на 5 и на 3.3 вольта, а также контроллер двух движков на L293 (такой же как и во второй реализации силового блока). В качестве контроллера тогда был выбран АТ89С2051. Это антикварный контроллер архитектуры MSC-51 в котором из периферии только два таймера, порты да UART, но я его люблю нежно и трепетно, так как первая любовь не проходит никогда =). К сожалению исходники его мега прошивки канули в Лету вместе с убившимся винтом, так что я не могу поделиться теми извращенскими алгоритмами, которые были туда засунуты. А там был и двухканальный ШИМ, и I2C Slave протокол, и контроль за положением шаговика с точным учетом его перемещения. Короче, знатный был проект. Ныне валяется трупом, т.к. все лень запустить Keil uVision и написать новую прошивку. Да и ассемблер С51 я стал уже забывать.
- На вход CW/CCW подаем направление вращения — 0 в одну сторону, 1 — в другую.
- на вход CLOCK — импульсы. Один импульс — один шаг.
- вход HALF/FULL задает режим работы — полный шаг/полушаг
- RESET сбрасывает драйвер в дефолтное состояние ABCD=0101.
- CONTROL определяет каким образом задается ШИМ, если он в нуле, то ШИМ образуется посредством выходов разрешения INH1 и INH2 , а если 1 то через выходы на драйвер ABCD. Это может пригодится, если вместо L298 у которой есть куда подключать входы разрешения INH1/INH2 будет либо самодельный мост на транзисторах, либо какая-либо другая микросхема.
- На вход Vref надо подать напряжение с потенциометра, которое будет определять максимальную перегрузочную способность. Подашь 5 вольт — будер работать на пределе, а в случае перегрузки сгорит L298 , подашь меньше — при предельном токе просто заглохнет. Я вначале тупо загнал туда питание, но потом передумал и поставил подстроечный резистор — защита все же полезная вещь, плохо будет если драйвер L298 сгорит.
Если же на защиту пофигу, то можешь заодно и резисторы, висящие на выходе sense выкинуть нафиг. Это токовые шунты, с них L297 узнает какой ток течет через драйвер L298 и решает сдохнет он и пора отрубать или еще протянет. Там нужны резисторы помощней, учитывая что ток через драйвер может достигать 4А, то при рекомендуемом сопротивлении в 0.5 Ом, будет падение напряжения порядка 2 вольт, а значит выделяемая моща будет около 4*2=8 Вт — для резистора огого! Я поставил двухваттные, но у меня и шаговик был мелкий, не способный схавать 4 ампера.
Спасибо. Вы потрясающие! Всего за месяц мы собрали нужную сумму в 500000 на хоккейную коробку для детского дома Аистенок. Из которых 125000+ было от вас, читателей EasyElectronics. Были даже переводы на 25000+ и просто поток платежей на 251 рубль. Это невероятно круто. Сейчас идет заключение договора и подготовка к строительству!
А я встрял на три года, как минимум, ежемесячной пахоты над статьями :)))))))))))) Спасибо вам за такой мощный пинок.
202 thoughts on “Управление шаговым двигателем”
А можешь посоветовать шаговик из тех, которые сейчас можно купить?
Я не знаю как у всех, но я д аже двухдюймовые флопики повыкидывал лет пять назад, а 5-ти дюймовых и в помине не было.
По продаваемым не в курсе. В нашей деревне их в продаже нету, а что там в Московии я даже не знаю.
Оппа, теперь самое время разбираться, что за шаговики у меня имеются по результатам годового потрошения CD-DVD ROM’ов. :)
А в сидюках/дивдюках вроде бы стоят обычные коллекторники+синхронный на шпиндель. Хотя могут быть и шаговики, но я не встречал ни разу.
Шаговики во многих CD/DVD приводах стоят — для таскания каретки с лазером (у меня минимум 3 таких экземпляра валяются). Но конструкция двигателя — как в трехдюймовых дисководах, для практического применения неудачная.
работал с шаговыми движками на своей фирме.
ещё с нашими совеццкими и руссийскими.
сколько раз коротыш верещал на источниках — не счесть ) единственное оправдание — я про них ещё тогда ничего не знал и доков не имел. работал методом тыка…
всё хорошо, но нету обратной связи.
зы! от постоянных замыканий избавлялись частыми переключениями обмоток, когда надо было застопорить двигло.
. в смысле от постоянных замыкани? Как ты умудрялся его коротнуть? Одновременным замыканием ключей верхнего и нижнего плеча? Так там Dead Time надо ставить!
юзал четырёхконтактный.
помню, что если подавать на обмотки долгое время неизменный сигнал, то будет такое.
хотя потом, когда пришёл паспорт на движок, то там было сказано, что можно так стопорить его.
Долгая подача напруги на обмотки это его нормальный рабочий режим. Главное чтобы напряжение было номинальным.
Полезно, спасибо. Мне в свое время довелось раскурочить 8″ дисковод. Два шаговика лежат дожидаются своего часа. Так, что информация может пригодиться.
У меня этих дисководов полтора десятка штук!
Еще одна задача — управление двигателем
постоянного тока на 24 в (12В), реверс,
управление скоростью. Есть буржуйская схема,
но без регулятора, могу тиснуть, схема из
стриммера, реверс-технология схемы.
кто знаком с драйвером шины ULN2804a b ULN2004a , какая разници между ними.
Кажется, один для КМОП, другой — для ТТЛ. Схема отличается только номиналом сопротивления от входного штырька до базы транзистора. В одном случае — 10ком (для КМОП), в другом — кажется, 1,5 ком, точно не помню. Ну, и входные уровни соответственно разные. В остальном — одинаково. Я сам года три назад выбирал, какие брать. А использую все же чаще ULN2003 (привычка, чтоли)…
У меня есть движок от древнего лазерного принтера. Двигатель фирмы CANON PM60-H418Z21B можно ли запустить таку вещь? Торчат из него по 3 провода с каждой обмотки. P.S. С шаговиками я делов не имел пока, но очень интересно.
Думаю без проблем. Судя по признакам это униполярный двигатель. Так что определяй где у него середина обмотки и дальше как я описал. Тока замерь сопротивление, чтобы узнать максимальный ток.
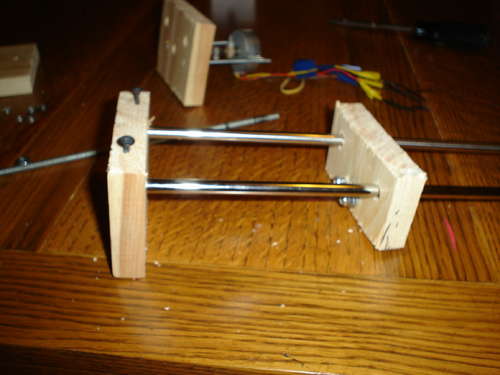
Берем детали от старого сканера. Чтобы построить собственный ЧПУ контроллер нужно для начала извлечь из сканера шаговый двигатель и плату управления. Здесь не приведено никаких фотографий, потому что каждый сканер выглядит по-своему, но обычно нужно просто снять стекло и вывернуть несколько винтов. Кроме двигателя и платы можно оставить еще металлические стержни, которые потребуются для тестирования шагового двигателя.
Шаг 3.
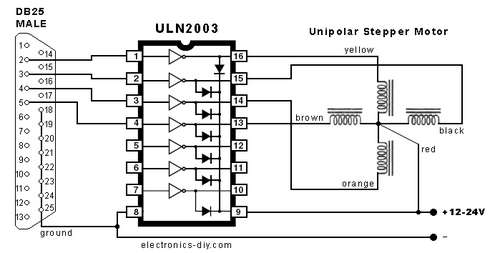
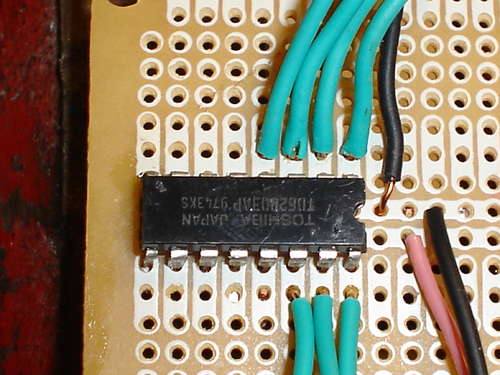
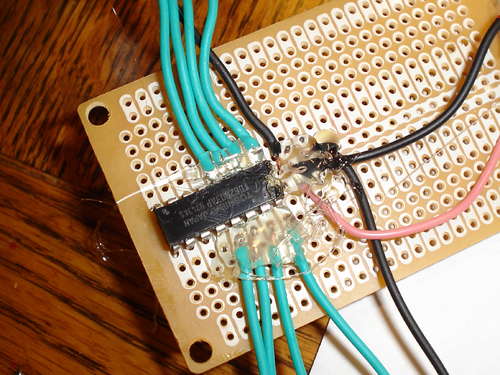
Извлекаем микросхему из платы управления Теперь нужно найти на плате управления шаговым двигателем микросхему ULN2003. Если вы не смогли обнаружить ее на своем устройстве, ULN2003 можно купить отдельно. Если она есть, ее нужно выпаять. Это потребует некоторого умения, но не так уж сложно. Сначала при помощи отсоса удалите как можно больше припоя. После этого осторожно просуньте под микросхему конец отвертки. Осторожно прикоснитесь концом паяльника к каждому выводу, продолжая при этом нажимать на отвертку.

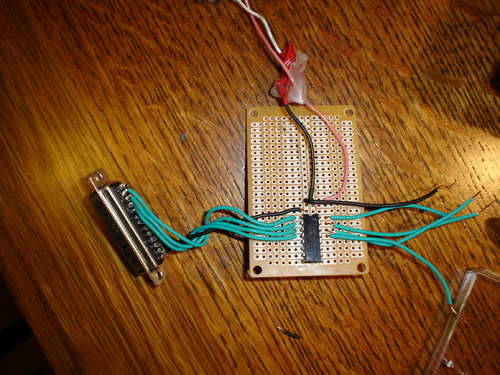
Шаг 4.
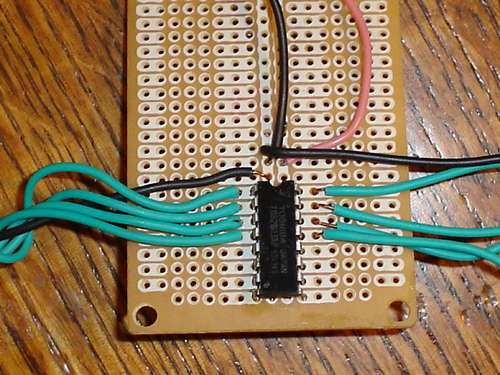
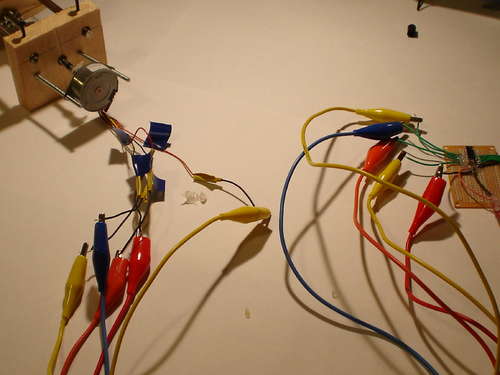
Пайка Теперь нам нужно припаять микросхему на макетную плату. Припаяйте к плате все выводы микросхемы. На показанной здесь макетной плате имеется две шины электропитания, поэтому положительный вывод ULN2003 (смотрите схему здесь и на рисунке ниже) припаивается к одной из них, а отрицательный - к другой. Теперь, нужно соединить вывод 2 коннектора параллельного порта с выводом 1 ULN2003. Вывод 3 коннектора параллельного порта соединяется с выводом 2 ULN2003, вывод 4 - с выводом 3 ULN2003 и вывод 5 - с выводом 4 ULN2003. Теперь вывод 25 параллельного порта припаивается к отрицательной шине питания. Далее к управляющему устройству припаивается мотор. Делать это придется путем проб и ошибок. Можно просто припаять провода так, чтобы потом цеплять на них крокодилы. Еще можно использовать клеммы с винтовым креплением или что-нибудь подобное. Просто припаяйте провода к выводам 16, 15, 14 и 13 микросхемы ULN2003. Теперь припаяйте провод (желательно черный) к положительной шине питания. Управляющее устройство почти готово. Наконец, подсоедините к шинам электропитания на макетной плате цилиндрическое гнездо для питания постоянного тока. Чтобы провода не могли отломаться, их закрепляют клеем из пистолета.


Шаг 5.
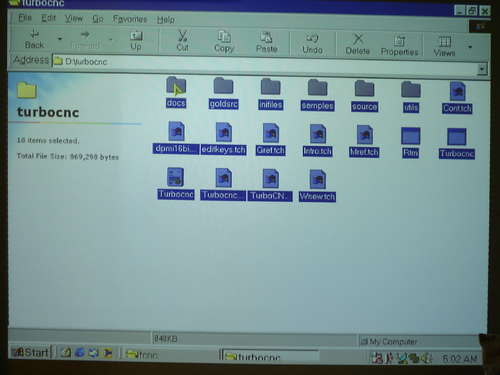
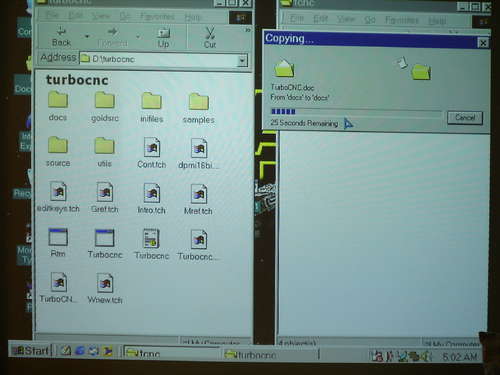
Установка программного обеспечения Теперь о программном обеспечении. Единственная вещь, которая точно будет работать с вашим новым устройством - это Turbo CNC. Скачайте его здесь. Распакуйте архив и запишите на CD. Теперь, на компьютере, который вы собираетесь использовать для управления, перейдите на диск C:// и создайте в корне папку "tcnc". Затем, скопируйте файлы с CD в новую папку. Закройте все окна. Вы только что установили Turbo CNC.
Шаг 6.
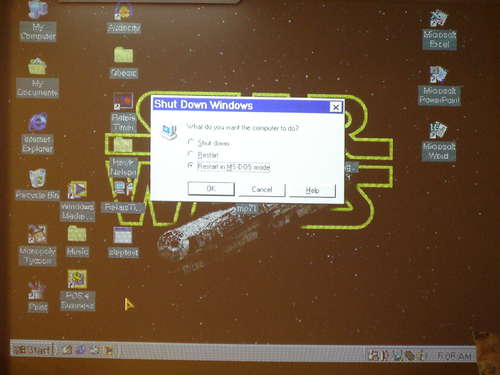
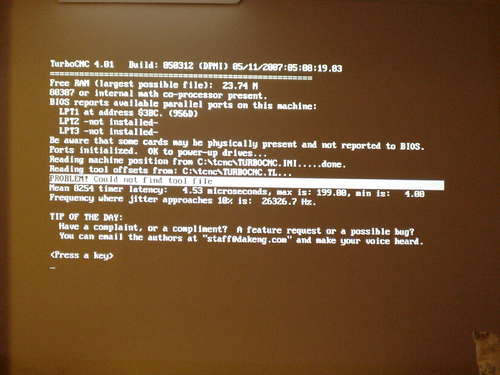
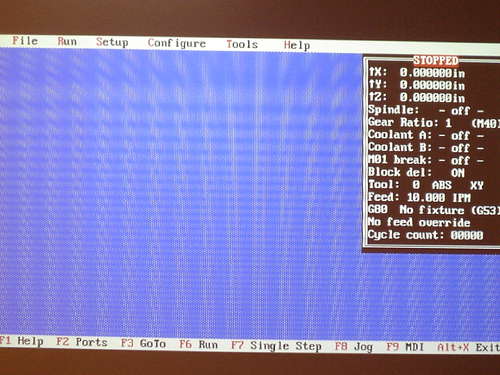
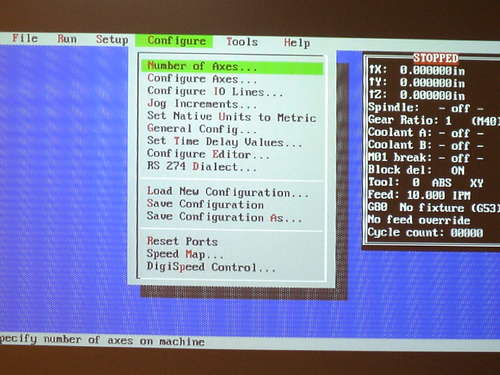
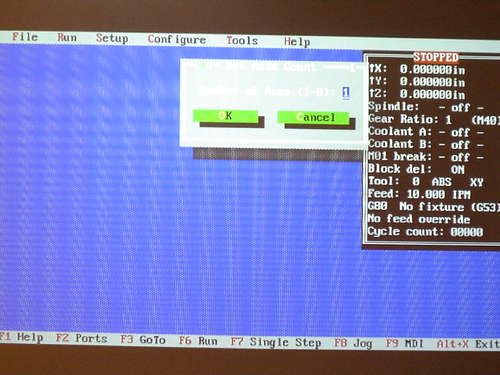
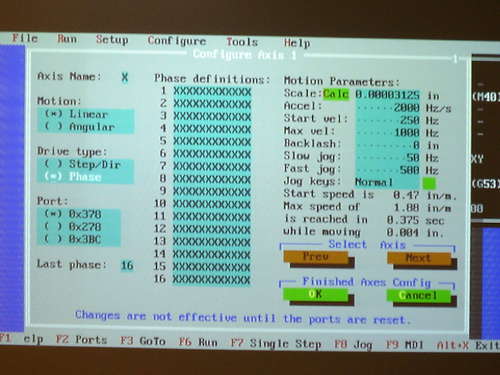
Настройка программного обеспечения Перезагрузите компьютер чтобы перейти к работе в MS-DOS. В командной строке наберите "C: cncTURBOCNC". Иногда лучше использовать загрузочный диск, тогда копия TURBOCNC помещается на него и нужно набирать, соответственно "A: cncTURBOCNC". Возникнет экран, похожий на изображенный на рис. 3. Нажмите пробел. Теперь вы находитесь в главном меню программы. Нажмите F1, и при помощи клавиш со стрелками выберите меню "Configure". При помощи клавиш со стрелками выберите "number of axis". Нажмите Enter. Введите количество осей, которые будут использоваться. Поскольку у нас только один мотор, выбираем "1". Нажмите Enter чтобы продолжить. Снова нажмите F1 и в меню "Configure" выберите пункт "Configure axes", затем дважды нажмите Enter.
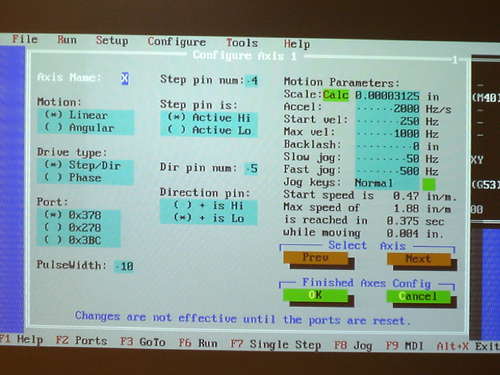
Появится следующий экран. Нажимайте Tab пока не перейдете к ячейке "Drive Type". При помощи стрелки вниз выберите пункт "Phase". Снова при помощи Tab выберите ячейку "Scale". Чтобы использовать калькулятор, нам нужно найти число шагов, которые двигатель делает за один оборот. Зная номер модели двигателя, можно установить на сколько градусов он поворачивается за один шаг. Чтобы найти число шагов, которые двигатель делает за один оборот, теперь нужно поделить 360 на число градусов за один шаг. Например, если мотор поворачивается за один шаг на 7,5 градусов, 360 поделить на 7,5 получится 48. Число, которое получится у вас, забейте в калькулятор шкалы (scale calculator).
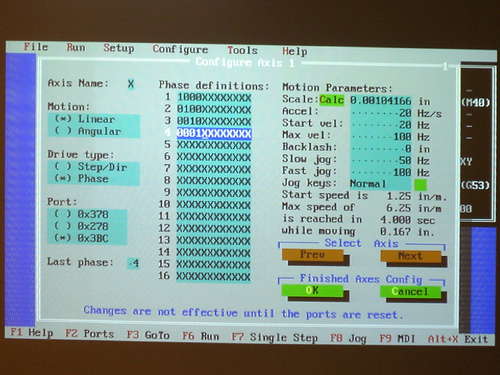
Остальные настройки оставьте как есть. Нажмите OK, и скопируйте число в ячейке Scale в такую же ячейку на другом компьютере. В ячейке Acceleration установите значение 20, поскольку установленных по умолчанию 2000 слишком много для нашей системы. Начальную скорость установите равной 20, а максимальную - 175. Нажимайте Tab пока не дойдете до пункта "Last Phase". Установите в нем значение 4. Нажимайте Tab пока не дойдете до первого ряда иксов.
Скопируйте следующее в четыре первых ячейки:
1000XXXXXXXX
0100XXXXXXXX
0010XXXXXXXX
0001XXXXXXXX
Остальные ячейки оставьте без изменений. Выберите OK. Теперь вы настроили программное обеспечение.

Шаг 7.
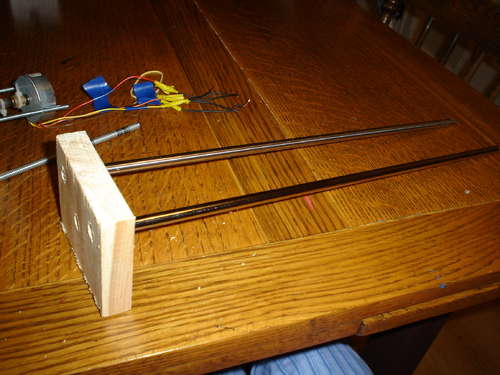
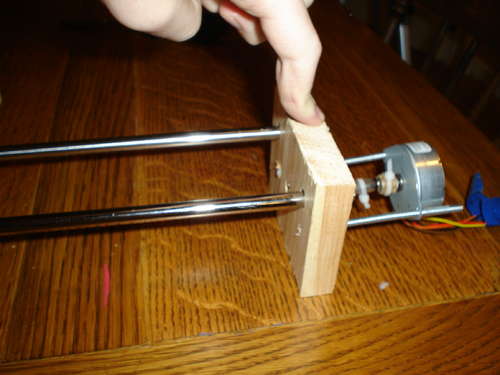
Строим тестовый вал Следующим этапом работы будет сборка простого вала для тестовой системы. Отрежьте 3 бруска дерева и скрепите их друг с другом. Чтобы получить ровные отверстия проведите на поверхности дерева ровную линию. Просверлите на линии два отверстия. Еще 1 отверстие просверлите посередине ниже первых двух. Отсоедините бруски. Через два отверстия, что находятся на одной линии, проденьте стальные пруты. Чтобы закрепить пруты воспользуйтесь небольшими шурупами. Проденьте пруты сквозь второй брусок. На последнем бруске закрепите двигатель. Не имеет значения, как вы это сделаете, будьте изобретательны.
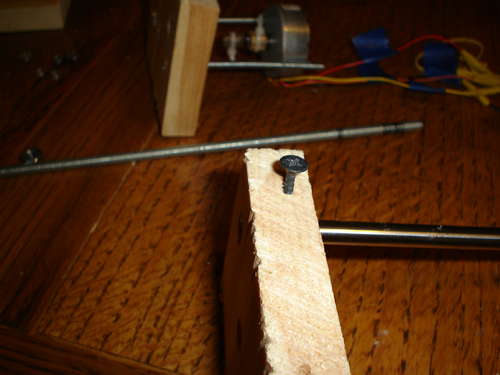
Чтобы закрепить двигатель, имевшийся в наличии, использовали два отрезка стержня с резьбой 1/8. Брусок с прикрепленным двигателем надевается на свободный конец стальных прутов. Снова закрепите их шурупами. Сквозь третье отверстие на первом бруске проденьте стержень с резьбой. Заверните на стержне гайку. Проденьте стержень сквозь отверстие во втором бруске. Поворачивайте стержень до тех пор, пока он не пройдет сквозь все отверстия и не дойдет до вала двигателя. Соедините вал двигателя и стержень при помощи шланга и зажимов из проволоки. На втором бруске гайка удерживается при помощи дополнительных гаек и винтов. В завершение, отрежьте брусок дерева для подставки. Привинтите ее шурупами ко второму бруску. Проверьте, установлена ли подставка ровно на поверхности. Регулировать положение подставки на поверхности можно при помощи дополнительных винтов и гаек. Так делается вал для тестовой системы.





Шаг 8.
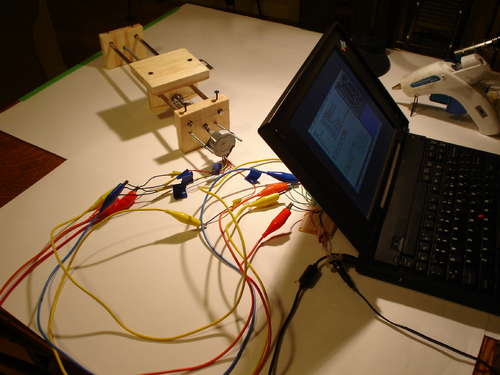
Подсоединяем и тестируем двигатель Теперь нужно соединить двигатель с контроллером. Во-первых, соедините общий провод (смотрите документацию к двигателю) с проводом, который был припаян к положительной шине питания. Другие четыре провода соединяются путем проб и ошибок. Соедините их все, и затем меняйте порядок соединения, если ваш двигатель делает два шага вперед и один назад или что-либо подобное. Для проведения тестирования подключите 12 В 350 мА источник питания постоянного тока в цилиндрическое гнездо. Затем соедините разъем DB25 c компьютером. В TurboCNC проверьте как соединен двигатель. В результате тестирования и проверки правильного подсоединения двигателя у вас должен получиться полностью работоспособный вал. Чтобы проверить масштабирование вашего устройства, прикрепите к нему маркер и запустите тестовую программу. Измерьте получившуюся линию. Если длина линии составляет порядка 2-3 см, устройство работает правильно. В противном случае, проверьте вычисления в шаге 6. Если у вас все получилось, поздравляем, самое трудное уже позади.
Шаг 9.
Изготовление корпуса
Часть 1
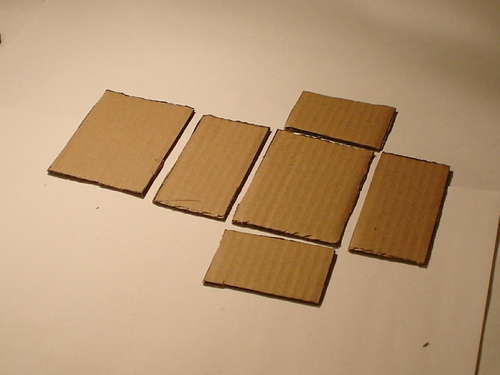
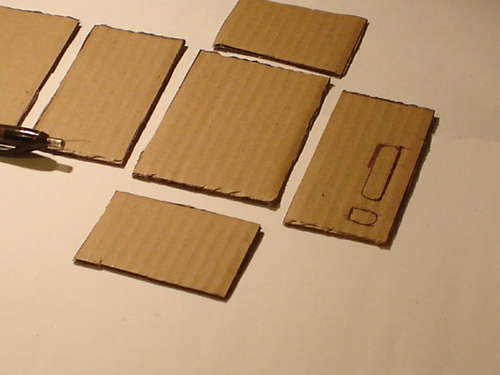
Изготовление корпуса - это завершительный этап. Присоединимся к защитникам природы и сделаем его из вторсырья. Тем более, что контроллер у нас тоже не с магазинных полок. У представленного вашему вниманию образца плата имеет размер 5 на 7,5 см, поэтому корпус будет размером 7,5 на 10 на 5 см, чтобы оставить достаточно места для проводов. Из картонной коробки вырезаем стенки. Вырезаем 2 прямоугольника размером 7,5 на 10 см, еще 2 размером 5 на 10 см и еще 2 размером 7,5 на 5 см (см. рисунки). В них нужно вырезать отверстия для разъемов. Обведите контуры разъема параллельного порта на одной из 5 х 10 стенок. На этой же стенке обведите контуры цилиндрического гнезда для питания постоянного тока. Вырежьте по контурам оба отверстия. То, что вы будете делать дальше, зависит от того, припаивали ли вы к проводам двигателя разъемы. Если да, то закрепите их снаружи второй пока пустой стенки размером 5 х 10. Если нет, проткните в стенке 5 отверстий для проводов. При помощи клеевого пистолета соедините все стенки вместе (кроме верхней, см. рисунки). Корпус можно покрасить.










Шаг 10.
Изготовление корпуса
Часть 2
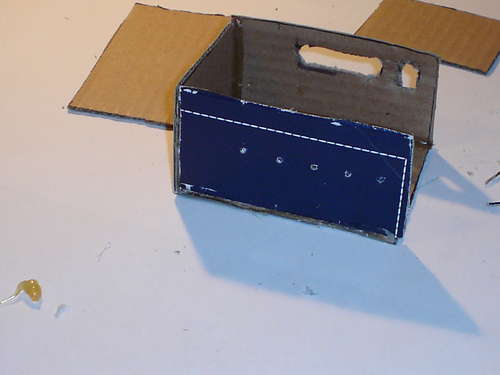
Теперь нужно приклеить все компоненты внутрь корпуса. Убедитесь, что на разъемы попало достаточно много клея, потому что они будут подвергаться большим нагрузкам. Чтобы коробка оставалась закрытой, нужно сделать защелки. Из пенопласта вырежьте пару ушек. Затем вырежьте пару полос и четыре небольших квадратика. Приклейте по два квадратика к каждой из полос как показано на рисунке. Приклейте ушки по обеим сторонам корпуса. Сверху коробки приклейте полосы. Этим завершается изготовление корпуса.

Шаг 11.
Возможные применения и заключение Этот контроллер можно применять как: - ЧПУ устройство - плоттер - или любую другую вещь, которой нужно точное управление движением. - добавление- Здесь приведены схема и инструкции по изготовлению контроллера с тремя осями. Чтобы настроить программное обеспечение, следуйте вышеуказанным шагам, но в поле "number of axis" введите 3.
Для настройки первой оси делайте все как было сказано выше, для второй оси тоже, но в строках первых четырех фаз введите следующее:
Измерение и контроль токов шаговых двигателей
Измерение и контроль токов шаговых двигателей
задался вопросом -как бы измерить ток в обмотках шаговиков. Для того чтобы подобрать оптимальный ток в драйверах, контролировать, все ли хорошо со станком и смотреть как с этим справляется БП.
Но я хотел вывести все амперметры на панель управления, а тогда мне придется гонять эти токи до панель с амперметрами и обратно. и как то это не хочется, лишние наводки, тратить толстый экранированный кабель..
Кто знает, как вывести амперметры на панель управления, но при этом не гоняя по ним те самые большие токи, которые они измеряют?
я подозреваю что в ответе замешаны шунты.. ) но толком не пойму как именно. ведь шунты они же для изменения пределов измерения..
а не.. кажись я понял. мне нужны трансформаторы тока. кто нибудь заморачивался подобным?
а не)) там же не переменный ток) там постояный. транформатор не прокатит
Лучший контроль - левая рука
ШД при работе должен быть тёплый. Блок питания просто брать с запасом. Один раз настроить по температуре и забыть . Все остальные контроли -лишняя перегрузка ненужной информацией. В автомобилях тоже раньше был указатель давления масла и тока заряда аккумулятора, а сейчас даже и температурный датчик перестали ставить.
Действующее значение силы тока в обмотках двигателя плюс ток ХХ драйвера, который много меньше.
Или кому-то нужна осциллограмма тока в каждой обмотке? Чай не кабина пилотов.
Не прав.
lkbyysq писал(а): Действующее значение силы тока в обмотках двигателя плюс ток ХХ драйвера, который много меньше.
Максимум что потребуется - поправочный коэффициент, типа на два-четыре поделить, чтоб понять ток в каждой обмотке.
"Действующее (эффективное) значение переменного тока равно величине такого постоянного тока, который за время, равное одному периоду переменного тока, произведёт такую же работу, что и рассматриваемый переменный ток."
Чему момент пропорционален? Действующему значению силы тока. Или у автора какие-либо иные цели нежели момент заценивать?
Конечно, если у него исследовательская работа, то я не прав.
Просто не прав.
Если что-то и контролировать, у ШД, так, как сказал Тенгель, температуру.
Кстати, она может доходить градусов до 70 и выше. Не каждая рука такой выдержит.
Правда, был знакомый токарь, так у него любимый прикол - снять голыми руками свежевыточенную деталь со станка и отдать наблюдающему за процессом заказчику.

С целью загладить вину подцепил на один провод шаговика токовый трансформатор 1:2000 к цифровому тестеру на диапазон 20мА.
Движки 86 на 4А. 80 вольт. ШВП 5мм. Без редукции.
На скорости 5000 кажет 1,4 А.
На скорости 1000-2000 кажет 2,5 А.
Че-то кажет. Дальше некогда.
lkbyysq писал(а): С целью загладить вину подцепил на один провод шаговика токовый трансформатор 1:2000 к цифровому тестеру на диапазон 20мА.
эмм трансформатор? то есть фигня что ток не переменный? или импульсы сойдут за переменный? всмысле он же не изменяется по направлению..
хм. датчих холла может лучше..
Правда, был знакомый токарь, так у него любимый прикол - снять голыми руками свежевыточенную деталь со станка и отдать наблюдающему за процессом заказчику.
ага а у меня был знакомый радиомеханик он любил проверять наличие напряжения на плате кинескопа (там киловольты) тыльной стороной ладони.. вот вы видели как в мультике том и джери бьют током и волосы дыбом?? я вот такое увидел в реале..
К сожалению без натурных испытаний нельзя понять подходит ли этот трансформатор для таких частот. В теории магнитопровод внутри может тятуть. На 50Гц правду показывает. Но герцы и сотни килогерц - небо и земля. Осциллограф нужен. Ну и рассчитан ли тестер на такие частоты не знаю.
С датчиком Холла проще наверное, на него точно есть даташиты с частотными характеристиками. Но все равно калибровку проверить стоит по напряжению на токоизмерительных резисторах драйвера.
lexalex83 писал(а): то есть фигня что ток не переменный? или импульсы сойдут за переменный? всмысле он же не изменяется по направлению..
Во-первых, таки изменяется
Во-вторых, сойдут
В-третьих, то, что тестер показал, особенно если он не "true RMS", имеет достаточно опосредованное отношение к току обмотки.
lexalex83 писал(а): был знакомый радиомеханик он любил проверять наличие напряжения на плате кинескопа (там киловольты) тыльной стороной ладони.
Есть такой грех у некоторых электриков. То что тыльной стороной - правильно, нет опасности захватить провод. Сама практика, конечно, идиотская. Потому как, чтобы вызвать фибрилляцию сердца, иногда достаточно совсем небольшого импульса, поданного в "нужный" момент цикла.
lkbyysq писал(а): С целью загладить вину подцепил на один провод шаговика токовый трансформатор 1:2000 к цифровому тестеру на диапазон 20мА.
Движки 86 на 4А. 80 вольт. ШВП 5мм. Без редукции.
На скорости 5000 кажет 1,4 А.
На скорости 1000-2000 кажет 2,5 А.
Че-то кажет. Дальше некогда.
Абсолютно бессмысленные измерения. Ток через обмотку ШД при нормальном драйвере, не зависит от скорости и всегда постоянен и определяется настройкой тока драйвера. Несколько уменьшаться может в режиме удержания (если таковой имеется). А зависимость показаний тестера от скорости, говорит о нелинейности частотных характеристик трансформатора и тестера. И вряд-ли здесь можно измерить ток. Теоретически в режиме вращения можно посмотреть сигнал на токоизмерительном резисторе осциллографом, но форма сигнала скорее всего не даст однозначного ответа. Так что самое простое - измерить напряжение на токоизмерительном резисторе тестером, или ток потребляемый драйвером в статике, это и будет правильное значение. А сказки что ток двигателя больше потребляемого драйвером противоречат закону сохранения энергии. Средний ток ШД будет меньше тока потребляемого драйвером из-за того что у последнего КПД не может быть больше 1.
Читайте также: