
Контроллер для компьютера своими руками
Обновлено: 03.07.2024
Маэстро
После многочасовой сессии за игрой хочется разбить клавиатуру? Скучаешь по duck hunt и wild gunman? Видел у своего кореша ps move, kinect или wii remote, но не можешь подключить их к своей пекарне? Специально для тебя был разработан отечественный аналог. В передней части установлены два светодиода, за движением которых следит веб камера твоего компьютера. Контроллер оборудован тремя кнопками, предназначенных для выполнения действий в игре. Перемещай теннисную ракетку, кисть или пистолет в игре движениями руки. В устройстве встроен аккумулятор на 150 mah. Никаких батареек! Обратите внимание на 3 главных эксклюзива, разработанных в construct 2 за один вечер: понг, рисовалка и duck hunt.
Ингридиенты и теория
Сейчас трудно найти пользователя, у которого на винте не было хотя бы немного музыки в формате MP3. И, наверняка, слушая на досуге музыку, вы не раз вставали, чтобы переключиться на другую композицию или изменить громкость. А может даже задумывались, что было бы неплохо управлять всем этим обычным пультом ДУ. Оказывается, сделать пульт для своего компьютера не так уж и сложно. Устройство состоит из двух частей: инфракрасного приемника и собственно пульта (серийного). Так же для работы устройства понадобятся дрова, но о этом попозже.
Для девайса нужно:
- Инфракрасный приемник Siemens SFH506-38 или ему подобный;
- Вольтрегулятор 78L05, 100 мА;
- Конденсатор 10 µF, 16 V;
- Конденсатор 100 nF;
- Резистор 4,7 кОм;
- Диод 1N4148;
- Разъем для COM-порта типа "мама";
- Провод (минимум три жилы);
- Пульт ДУ от любого телевизора;
- Паяльник и принадлежности.
Для принимающей части (ресивера) лучше всего использовать инфракрасный приемник на 38 кГц, так как большинство пультов пользуется именно этой частотой. Я использовал Siemens, потому что его легко найти. Также можно взять приемник на 36 или 40 кГц, но в этом случае может пострадать дальность приема и качество передаваемого сигнала (будут появляться многочисленные ошибки). Вот список аналогичных Сименсу приемников:
Vishay TSOP 1738
Vishay TSOP 1838
Vishay TSOP 11.. series
Siemens SFH 506
Siemens SFH 5110
Radio Shack 276-0137
Everlight IRM 8100-3-M
Mitsumi IR Preamp KEY-COOSV (0924G)
TOSHIBA TK19 444 TFMS 5360
TEMIC TFMS 5380
Everlight IRM-8601S
Sony SBX 1620-12
Sharp GP1U271R
Kodenshi PIC-12043S
Daewoo DHR-38 C 28
А теперь немного о устройстве ресивера. Теоритически (по документации) радиус действия приемника составляет 30 м, я думаю этого хватит для любой квартиры:). Идущий от пульта сигнал поступает на выход приемника как ‘Active Low’, поэтому если вы будете использовать приемник, не указанный в списке, то главное что бы он был на 5В и передавал сигналы как “A.L.”. Для питания устройства мы будем использовать RTS линию COM-порта. Что бы предотвратить попадание отрицательного напряжения из линии нужно поставить диод D1, а для обеспечения напряжения в 5В используем вольтрегулятор IC2.
Если вы используете COM-порт на 25 штырьков то подсоединять устройство придется не к тем контактам, что используется в 9-ти пиновом. Вот маленькая табличка.
| Линия | RTS | GND | DCD |
| 25-pin | 4 | 7 | 8 |
| 9-pin | 7 | 5 | 1 |
| Назначение | Питание | Земля | Сигнал |
Assembly
Ну а теперь приступим к сборке. Сначала на печатной плате надо разместить все детали приемника по такой схеме:
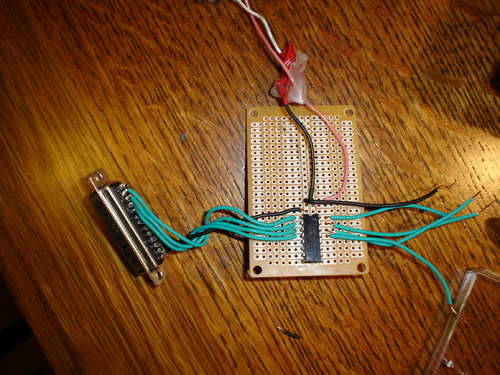
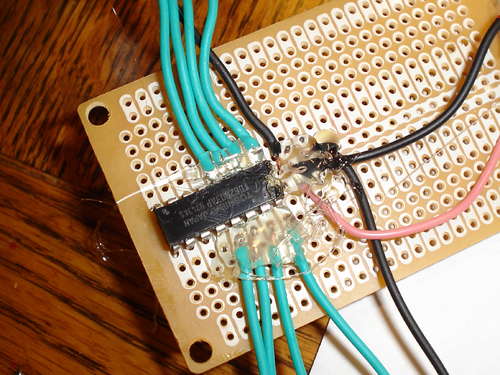
Далее возьмите разъем для COM-порта типа "мама" и припаяйте его к шнурку (я взял шнур от старой АТ’ой клавиатуры), а другой конец провода спаяйте с принимающей частью. У вас должно получиться что-то типа этого:

Теперь вы можете упаковать всю начинку в какой нибудь футлярчик или закрепить приемник на лицевой панели вашего ПК (в дополнение к ЖКИ, если он у вас есть). Получается почти как в бытовой аппаратуре.

Половина дела сделана, осталось найти подходящий пульт. Очень хорошо подходят пульты Samsung и Panasonic. Правда бывают и исключения. Мой ДУ от телевизора Самсунг работал очень плохо, половина кнопок не хотели вообще распознаваться, а вот пульт от видеомагнитофона (тоже Самсунг) наоборот, работал отлично.
Берем детали от старого сканера. Чтобы построить собственный ЧПУ контроллер нужно для начала извлечь из сканера шаговый двигатель и плату управления. Здесь не приведено никаких фотографий, потому что каждый сканер выглядит по-своему, но обычно нужно просто снять стекло и вывернуть несколько винтов. Кроме двигателя и платы можно оставить еще металлические стержни, которые потребуются для тестирования шагового двигателя.
Шаг 3.
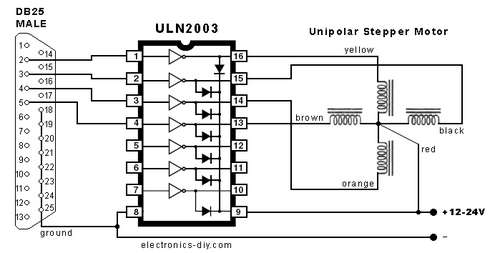
Извлекаем микросхему из платы управления Теперь нужно найти на плате управления шаговым двигателем микросхему ULN2003. Если вы не смогли обнаружить ее на своем устройстве, ULN2003 можно купить отдельно. Если она есть, ее нужно выпаять. Это потребует некоторого умения, но не так уж сложно. Сначала при помощи отсоса удалите как можно больше припоя. После этого осторожно просуньте под микросхему конец отвертки. Осторожно прикоснитесь концом паяльника к каждому выводу, продолжая при этом нажимать на отвертку.

Шаг 4.
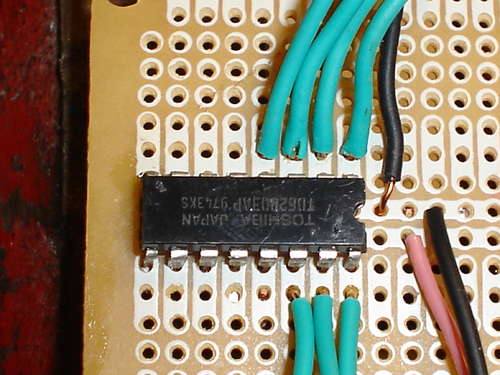
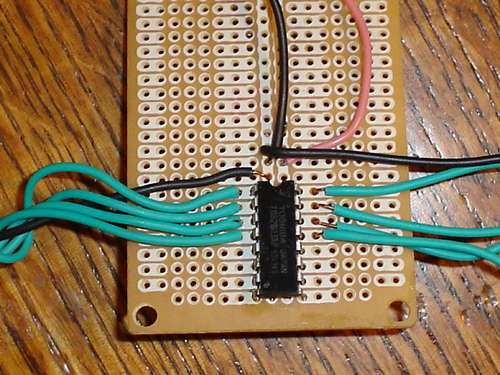
Пайка Теперь нам нужно припаять микросхему на макетную плату. Припаяйте к плате все выводы микросхемы. На показанной здесь макетной плате имеется две шины электропитания, поэтому положительный вывод ULN2003 (смотрите схему здесь и на рисунке ниже) припаивается к одной из них, а отрицательный - к другой. Теперь, нужно соединить вывод 2 коннектора параллельного порта с выводом 1 ULN2003. Вывод 3 коннектора параллельного порта соединяется с выводом 2 ULN2003, вывод 4 - с выводом 3 ULN2003 и вывод 5 - с выводом 4 ULN2003. Теперь вывод 25 параллельного порта припаивается к отрицательной шине питания. Далее к управляющему устройству припаивается мотор. Делать это придется путем проб и ошибок. Можно просто припаять провода так, чтобы потом цеплять на них крокодилы. Еще можно использовать клеммы с винтовым креплением или что-нибудь подобное. Просто припаяйте провода к выводам 16, 15, 14 и 13 микросхемы ULN2003. Теперь припаяйте провод (желательно черный) к положительной шине питания. Управляющее устройство почти готово. Наконец, подсоедините к шинам электропитания на макетной плате цилиндрическое гнездо для питания постоянного тока. Чтобы провода не могли отломаться, их закрепляют клеем из пистолета.


Шаг 5.
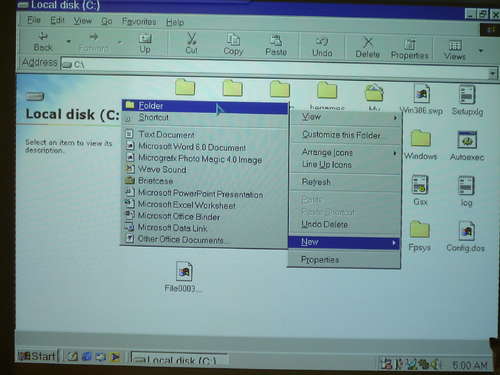
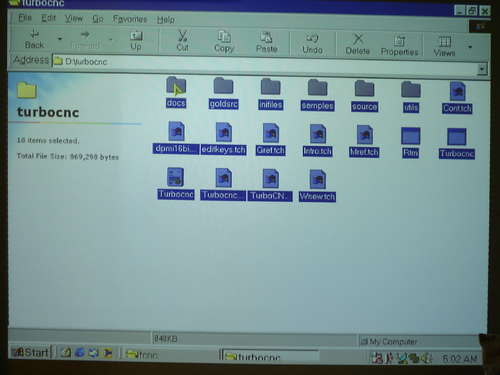
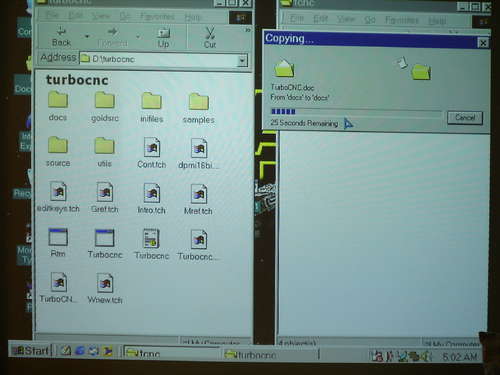
Установка программного обеспечения Теперь о программном обеспечении. Единственная вещь, которая точно будет работать с вашим новым устройством - это Turbo CNC. Скачайте его здесь. Распакуйте архив и запишите на CD. Теперь, на компьютере, который вы собираетесь использовать для управления, перейдите на диск C:// и создайте в корне папку "tcnc". Затем, скопируйте файлы с CD в новую папку. Закройте все окна. Вы только что установили Turbo CNC.
Шаг 6.
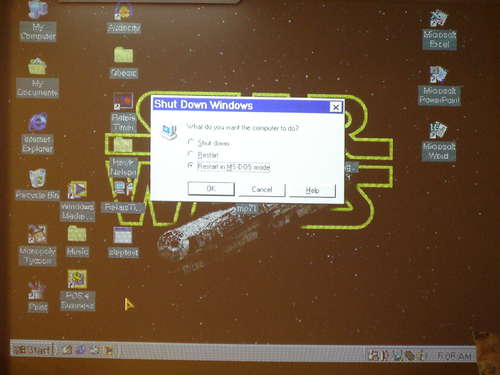
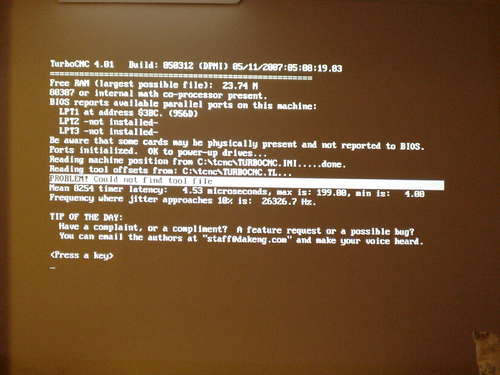
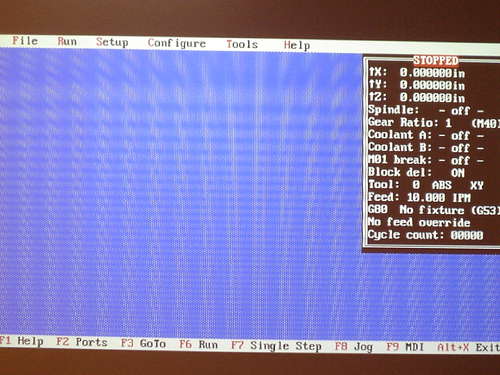
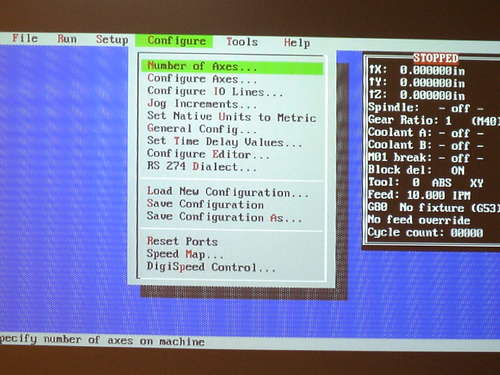
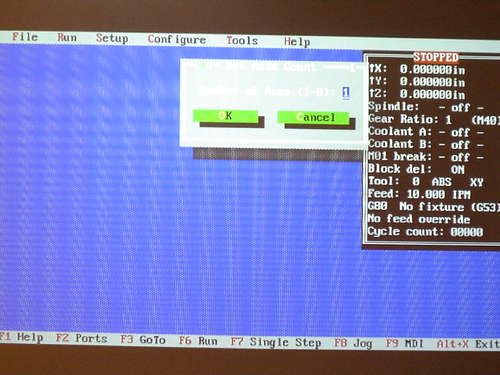
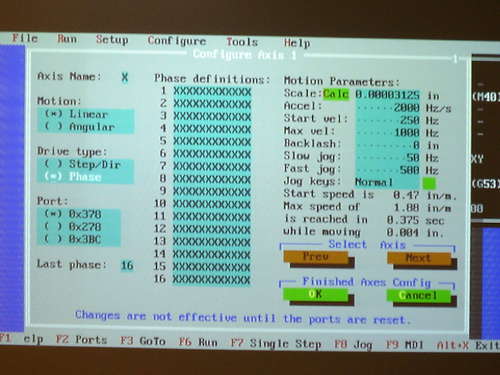
Настройка программного обеспечения Перезагрузите компьютер чтобы перейти к работе в MS-DOS. В командной строке наберите "C: cncTURBOCNC". Иногда лучше использовать загрузочный диск, тогда копия TURBOCNC помещается на него и нужно набирать, соответственно "A: cncTURBOCNC". Возникнет экран, похожий на изображенный на рис. 3. Нажмите пробел. Теперь вы находитесь в главном меню программы. Нажмите F1, и при помощи клавиш со стрелками выберите меню "Configure". При помощи клавиш со стрелками выберите "number of axis". Нажмите Enter. Введите количество осей, которые будут использоваться. Поскольку у нас только один мотор, выбираем "1". Нажмите Enter чтобы продолжить. Снова нажмите F1 и в меню "Configure" выберите пункт "Configure axes", затем дважды нажмите Enter.
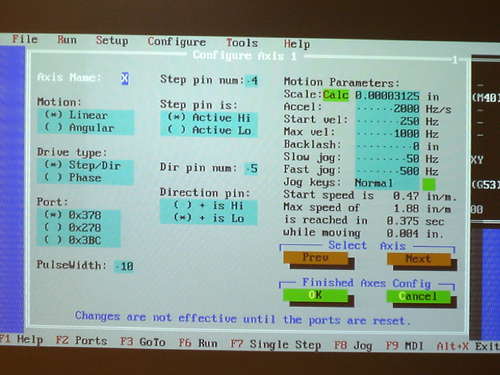
Появится следующий экран. Нажимайте Tab пока не перейдете к ячейке "Drive Type". При помощи стрелки вниз выберите пункт "Phase". Снова при помощи Tab выберите ячейку "Scale". Чтобы использовать калькулятор, нам нужно найти число шагов, которые двигатель делает за один оборот. Зная номер модели двигателя, можно установить на сколько градусов он поворачивается за один шаг. Чтобы найти число шагов, которые двигатель делает за один оборот, теперь нужно поделить 360 на число градусов за один шаг. Например, если мотор поворачивается за один шаг на 7,5 градусов, 360 поделить на 7,5 получится 48. Число, которое получится у вас, забейте в калькулятор шкалы (scale calculator).
Остальные настройки оставьте как есть. Нажмите OK, и скопируйте число в ячейке Scale в такую же ячейку на другом компьютере. В ячейке Acceleration установите значение 20, поскольку установленных по умолчанию 2000 слишком много для нашей системы. Начальную скорость установите равной 20, а максимальную - 175. Нажимайте Tab пока не дойдете до пункта "Last Phase". Установите в нем значение 4. Нажимайте Tab пока не дойдете до первого ряда иксов.
Скопируйте следующее в четыре первых ячейки:
1000XXXXXXXX
0100XXXXXXXX
0010XXXXXXXX
0001XXXXXXXX
Остальные ячейки оставьте без изменений. Выберите OK. Теперь вы настроили программное обеспечение.

Шаг 7.
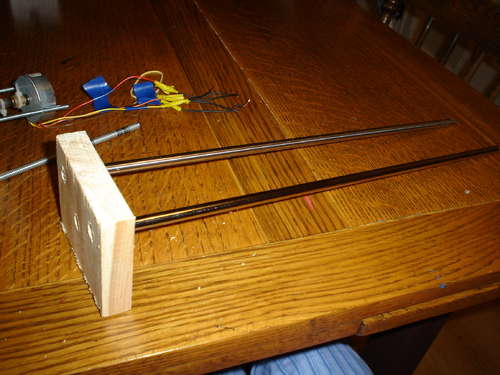
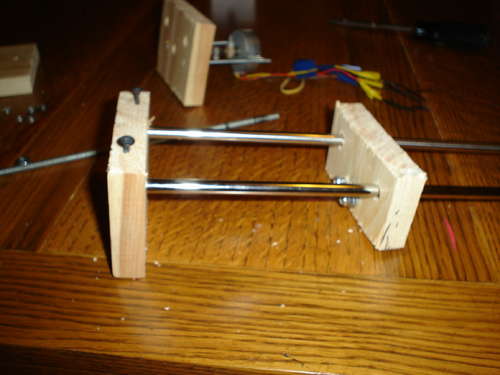
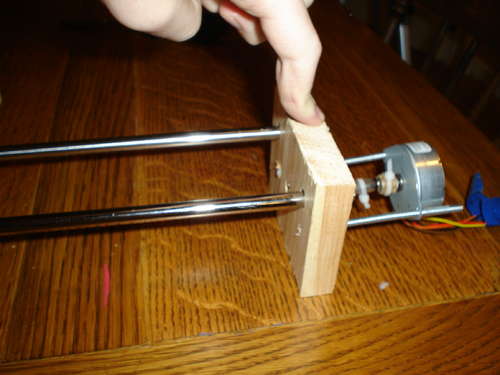
Строим тестовый вал Следующим этапом работы будет сборка простого вала для тестовой системы. Отрежьте 3 бруска дерева и скрепите их друг с другом. Чтобы получить ровные отверстия проведите на поверхности дерева ровную линию. Просверлите на линии два отверстия. Еще 1 отверстие просверлите посередине ниже первых двух. Отсоедините бруски. Через два отверстия, что находятся на одной линии, проденьте стальные пруты. Чтобы закрепить пруты воспользуйтесь небольшими шурупами. Проденьте пруты сквозь второй брусок. На последнем бруске закрепите двигатель. Не имеет значения, как вы это сделаете, будьте изобретательны.
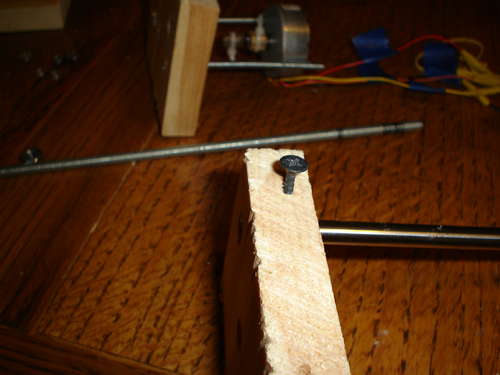
Чтобы закрепить двигатель, имевшийся в наличии, использовали два отрезка стержня с резьбой 1/8. Брусок с прикрепленным двигателем надевается на свободный конец стальных прутов. Снова закрепите их шурупами. Сквозь третье отверстие на первом бруске проденьте стержень с резьбой. Заверните на стержне гайку. Проденьте стержень сквозь отверстие во втором бруске. Поворачивайте стержень до тех пор, пока он не пройдет сквозь все отверстия и не дойдет до вала двигателя. Соедините вал двигателя и стержень при помощи шланга и зажимов из проволоки. На втором бруске гайка удерживается при помощи дополнительных гаек и винтов. В завершение, отрежьте брусок дерева для подставки. Привинтите ее шурупами ко второму бруску. Проверьте, установлена ли подставка ровно на поверхности. Регулировать положение подставки на поверхности можно при помощи дополнительных винтов и гаек. Так делается вал для тестовой системы.





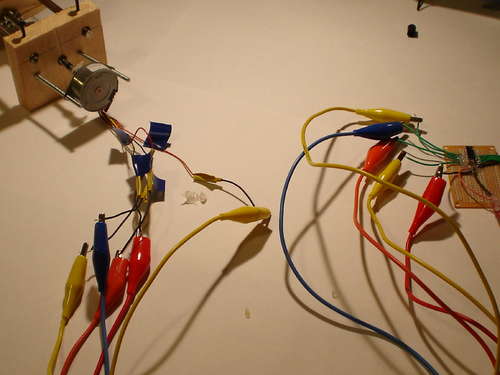
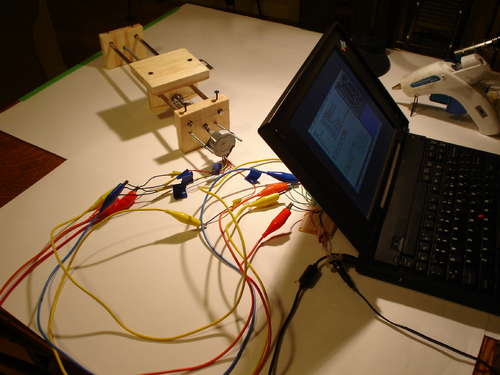
Шаг 8.
Подсоединяем и тестируем двигатель Теперь нужно соединить двигатель с контроллером. Во-первых, соедините общий провод (смотрите документацию к двигателю) с проводом, который был припаян к положительной шине питания. Другие четыре провода соединяются путем проб и ошибок. Соедините их все, и затем меняйте порядок соединения, если ваш двигатель делает два шага вперед и один назад или что-либо подобное. Для проведения тестирования подключите 12 В 350 мА источник питания постоянного тока в цилиндрическое гнездо. Затем соедините разъем DB25 c компьютером. В TurboCNC проверьте как соединен двигатель. В результате тестирования и проверки правильного подсоединения двигателя у вас должен получиться полностью работоспособный вал. Чтобы проверить масштабирование вашего устройства, прикрепите к нему маркер и запустите тестовую программу. Измерьте получившуюся линию. Если длина линии составляет порядка 2-3 см, устройство работает правильно. В противном случае, проверьте вычисления в шаге 6. Если у вас все получилось, поздравляем, самое трудное уже позади.
Шаг 9.
Изготовление корпуса
Часть 1
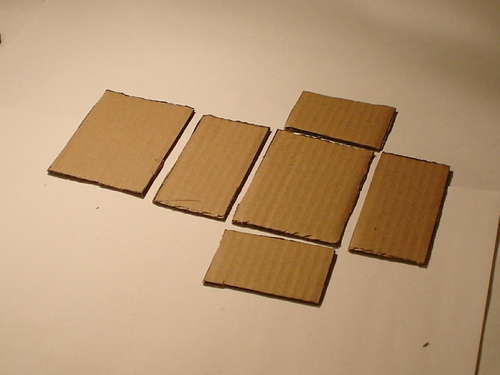
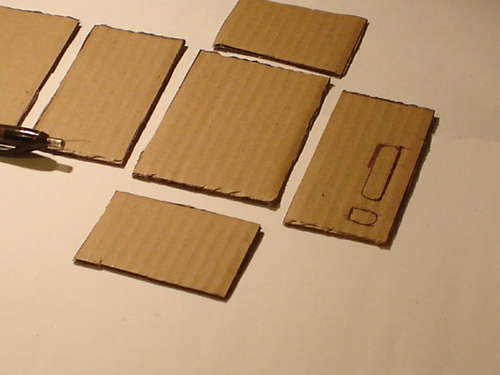
Изготовление корпуса - это завершительный этап. Присоединимся к защитникам природы и сделаем его из вторсырья. Тем более, что контроллер у нас тоже не с магазинных полок. У представленного вашему вниманию образца плата имеет размер 5 на 7,5 см, поэтому корпус будет размером 7,5 на 10 на 5 см, чтобы оставить достаточно места для проводов. Из картонной коробки вырезаем стенки. Вырезаем 2 прямоугольника размером 7,5 на 10 см, еще 2 размером 5 на 10 см и еще 2 размером 7,5 на 5 см (см. рисунки). В них нужно вырезать отверстия для разъемов. Обведите контуры разъема параллельного порта на одной из 5 х 10 стенок. На этой же стенке обведите контуры цилиндрического гнезда для питания постоянного тока. Вырежьте по контурам оба отверстия. То, что вы будете делать дальше, зависит от того, припаивали ли вы к проводам двигателя разъемы. Если да, то закрепите их снаружи второй пока пустой стенки размером 5 х 10. Если нет, проткните в стенке 5 отверстий для проводов. При помощи клеевого пистолета соедините все стенки вместе (кроме верхней, см. рисунки). Корпус можно покрасить.










Шаг 10.
Изготовление корпуса
Часть 2
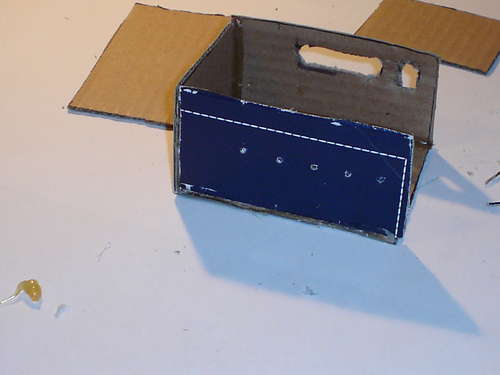
Теперь нужно приклеить все компоненты внутрь корпуса. Убедитесь, что на разъемы попало достаточно много клея, потому что они будут подвергаться большим нагрузкам. Чтобы коробка оставалась закрытой, нужно сделать защелки. Из пенопласта вырежьте пару ушек. Затем вырежьте пару полос и четыре небольших квадратика. Приклейте по два квадратика к каждой из полос как показано на рисунке. Приклейте ушки по обеим сторонам корпуса. Сверху коробки приклейте полосы. Этим завершается изготовление корпуса.

Шаг 11.
Возможные применения и заключение Этот контроллер можно применять как: - ЧПУ устройство - плоттер - или любую другую вещь, которой нужно точное управление движением. - добавление- Здесь приведены схема и инструкции по изготовлению контроллера с тремя осями. Чтобы настроить программное обеспечение, следуйте вышеуказанным шагам, но в поле "number of axis" введите 3.
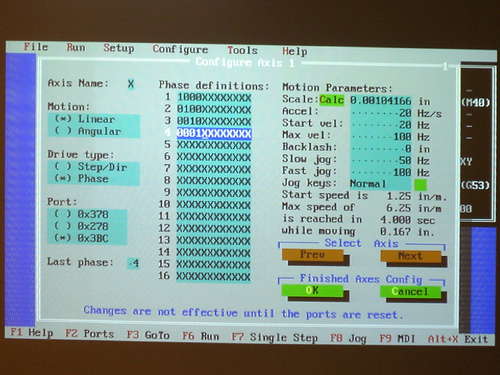
Для настройки первой оси делайте все как было сказано выше, для второй оси тоже, но в строках первых четырех фаз введите следующее:

Сегодня разберёмся что такое ШИМ и с чем его едят, а также как сделать контроллер в домашних условиях.
Что такое ШИМ?
ШИМ (широтно-импульсная модуляция, англ. pulse—width modulation (PWM)) — это способ управления мощностью путём импульсной подачи питания. Мощность меняется в зависимости от длительности подаваемых импульсов.
ШИМ в современной электронике применяется повсеместно, для регулировки яркости подсветки вашего смартфона, скорости вращения кулера в компьютере, для управления моторами квадрокоптера или гироскутера. Cписок можно продолжать бесконечно.
В любительской электронике ШИМ контроллеры часто используются для управления яркостью светодиодных лент и для управления мощными двигателями постоянного тока.
Принцип работы ШИМ
В отличии от линейных систем, где мощность регулируется путём снижения электрических параметров (тока или напряжения), при использовании ШИМ мощность, передаваемая потребителю, регулируется временем импульсов, что существенно повышает эффективность работы контроллера. В аналоговых системах остаточная мощность рассеивалась в виде тепла, здесь же при снижении потребления остаточная мощность просто не используется.
Основная характеристика ШИМ – СКВАЖНОСТЬ (процент заполнения) – процентное соотношение длительности импульсов к периоду. На рисунке ниже изображено 5 степеней скважности прямоугольного ШИМ сигнала:
![]()
Скважность ШИМ
ПЕРИОД — это время за которое происходит полный цикл колебания сигнала. Измеряется в секундах. Он линейно зависит от частоты сигнала и рассчитывается по формуле:
f(частота) = 1/ T(перод)
Частота ШИМ – это количество периодов (или если хотите, циклов колебаний) в единицу времени. Частота измеряется в Герцах (Гц), 1 Гц это одно колебание в 1 секунду.
Если сигнал делает 100 колебаний в секунду, значит частота равняется 100 Гц. Чем выше частота тем меньше период.
Откуда берётся ШИМ
Вариант 1 — аналоговый
ШИМ сигнал создаётся специально сконструированными устройствами – генераторами ШИМ сигнала или генераторами прямоугольных импульсов. Они могут быть собраны как на аналоговой базе, так и на основе микроконтроллеров, как в виде схемы из нескольких транзисторов, так и в виде интегральной микросхемы.
Самый простой вариант это микросхема NE555, собирается всё по схеме:

Схема ШИМ генератора на NE555
Но если лень разбираться и паять, то китайцы за нас всё уже давно сделали.

ШИМ генератор на NE555
Стоит $0,5, работает стабильно при питании от 5 до 16 вольт. Выдаёт ШИМ сигнал амплитудой в 5 вольт, скважность можно менять подстроечным резистором (вон та синяя штуковина с вырезом под отвертку). При желании можно заменить подстроечный резистор на переменный и получим удобную ручку регулировки.
Вариант 2 – цифровой
Более сложный для новичка – использование микроконтроллера, но вместе с тем более интересный и дающий широкие возможности. Звучит страшно, но самом деле реализуется довольно просто.
В качестве микроконтроллера удобнее всего взять отладочную плату ардуино.
Как с ней работать написано вот здесь. Подключаем ардуинку к компьютеру и заливаем в неё вот такой наисложнейший код:
Далее цепляемся осциллографом к пину D3 и видим:

ШИМ скважность 30%
Сигнал частотой (Freq) -526 Гц, амплитудой (Vmax)- 5 вольт и скважностью (duty) – 30.9 %.
Меняем скважность в коде — меняется и скважность на выходе. Добавляем датчик температуры или освещённости, прописываем зависимость скважности на выходе от показаний датчиков и — готова регулировка с обратной связью.
Как подключить к нагрузке
Напрямую генератор ШИМ сигнала к нагрузке подключать не следует, потому как он слаботочный и скорее все сразу же сгорит. Для того, чтобы управлять нагрузкой необходим ключ на мосфет-транзисторе. Берём N-канальный мосфет-транзистор IRF3205 и собираем всё по схеме:

Ардуино ШИМ на IRF3205
Резистор R1 нужен для защиты пина ардуинки от выгорания, а резистор R2 для того, чтобы транзистор полностью закрывался, когда ардуина не даёт выходного сигнала.
Как видно ничего сложного. Четыре элемента и ШИМ-контроллер готов. Он уже может управлять одноцветной светодиодной лентой или каким-нибудь моторчиком.
Если нужна трехцветная лента или больше лент (делаем многоканальный ШИМ), просто добавляем ключи на пины D3, D5, D6, D9, D10, D11 (только на них работает ШИМ). Итого, Ардуина способна управлять мощностью 6-ти устройств одновременно.
IRF3205 способен выдерживать токи до 70 Ампер при напряжении до 55 Вольт, таких характеристик вполне достаточно для решения большинства бытовых задач.
Если нужно управлять плюсовым контактом
В таком случае нам понадобится другой мосфет- транзистор — P-канальный. Схема аналогична, только подтягивающий резистор подключен к плюсу.
Также нужно будет инвертировать сигнал на выходе ардуино, ведь при подаче 5 вольт транзистор будет закрываться, а при 0 — открываться, значит шим скважностью в 30% выдаст 70% мощность на выходе схемы.

ШИМ на irf4905, питание5 v
Стоит оговориться такая схема будет работать только при питании не выше 5 вольт, так как для полного закрытия P-канального транзистора необходимо подтянуть его затвор к плюсу питания, а ардуина способна выдавать на цифровой пин только 5 вольт. Значит, при питании хотя бы чуть-чуть выше напряжения выдаваемого на цифровой пин транзистор будет не полностью закрываться при верхней части импульса ШИМ и БУДЕТ СИЛЬНО ГРЕТЬСЯ. Полностью отключить нагрузку он тоже не сможет.

Ардуино, управление ШИМ по плюсовому проводу IRF4905
Контроллер ШИМ для RGB светодиодной ленты
В качестве примера приведу схему ШИМ контроллера для RGB светодиодной ленты на ардуино. В ней используется трёхканальный ШИМ для управления тремя цветами ленты. Ниже будет ссылка на готовое устройство, собранное на этой схеме управления.

ШИМ контроллер RGB ленты на ардуино
Соединяется всё вот так:

В схеме я добавил ещё кнопку, она нам поможет в будущем переключать цвета и регулировать яркость.
Вот простой код, позволяющий засветить ленту различными цветами. Чтобы изменить цвет подставьте цифры в значения для R, G и B из комментария ниже.

Приветствую, мозгоизобретатели! Сегодня собираем своими руками полезную вещь — контроллер мотора, который может пригодиться при создании множества самоделок, использующих двигатель под управлением микроконтроллера.
Данная поделка проста по конструкции, может быть использована в качестве электронного контроллера скорости (ESC), и имеет прямое и обратное управление. Спектр ее применения от робототехники, устройств дистанционного управления, портативного транспорта, до других разнообразных проектов, использующих моторы.
Думаю, что это мозгоруководство будет вам интересно!
Шаг 1: Инструменты и материалы
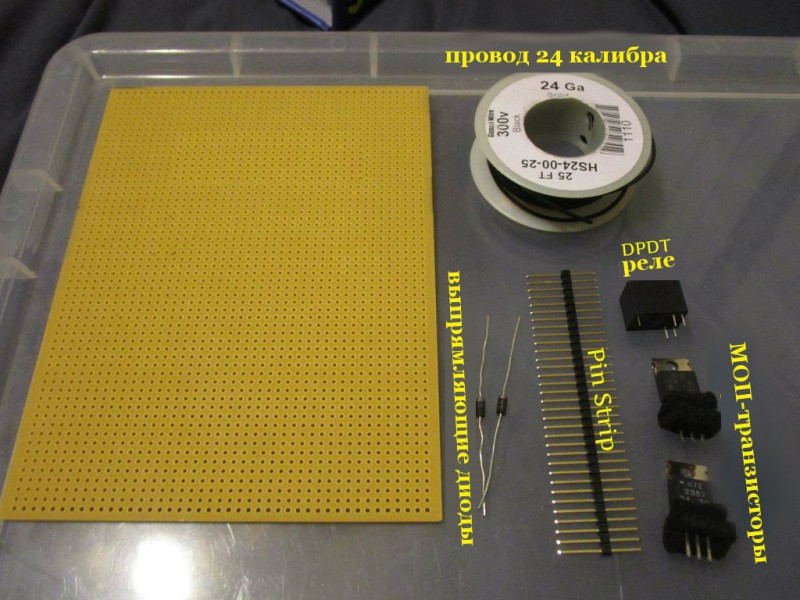

Как говорилось, эта поделка проста и использует минимум деталей:
А еще понадобятся некоторые инструменты:
- паяльник и припой
- клеевой пистолет
- изоляционные кусачки
- дремель или что-то подобное для обрезки макетной платы
Шаг 2: Компоновка деталей

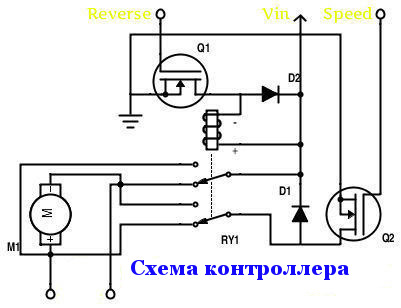
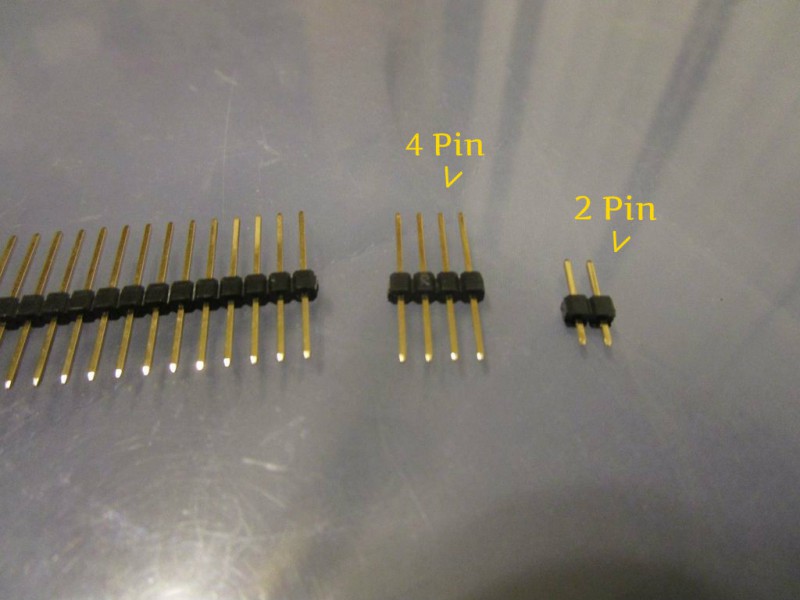

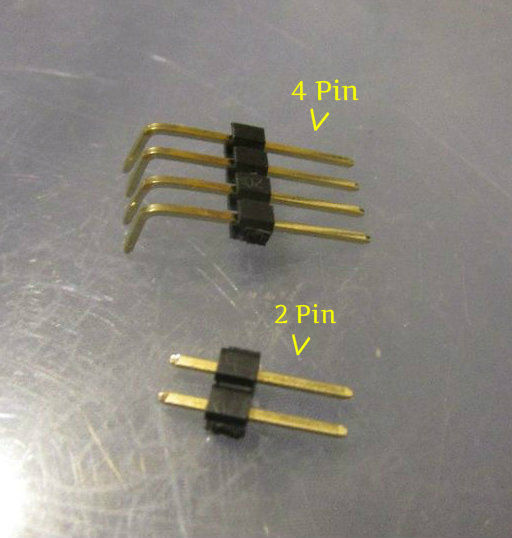
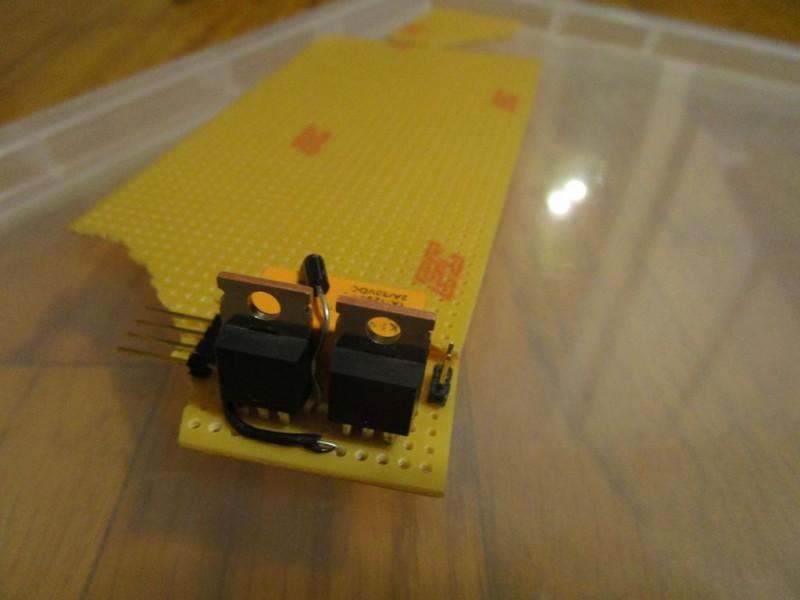
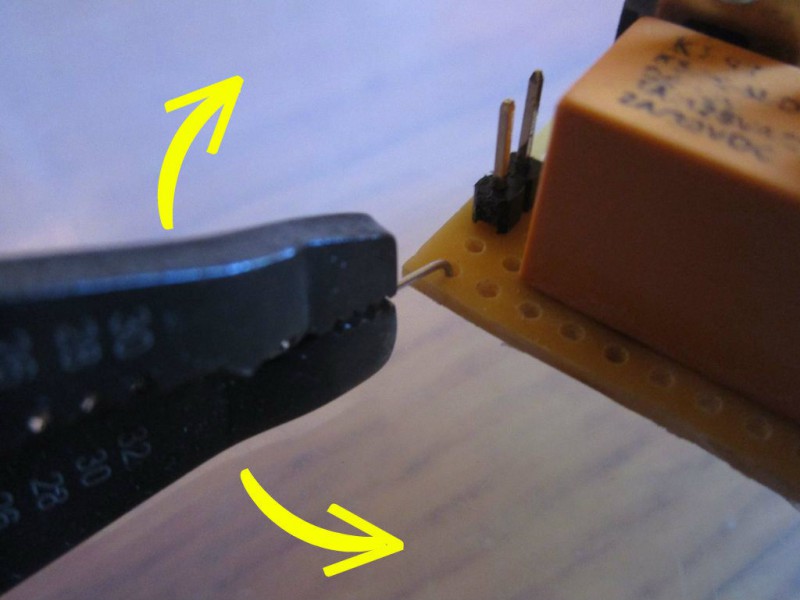
На макетную плату помещаем все мозгодетали, причем таким образом, чтобы можно было легко их спаять согласно схеме при наименьших габаритах. От штырьковой полосы отделяем кусочек с 2-мя контактами и кусок с 4-мя контактами (если вы планируете припаять контакты двигателя непосредственно к плате, то 2-х штырьковый разъем не понадобится). На 2-х контактном отрезке укорачиваем штырьки с обоих сторон, а на 4-х контактном загибаем под углом 90 градусов штырьки одной стороны с помощью изоляционных кусачек, либо другого подходящего инструмента.
Шаг 3: Пайка


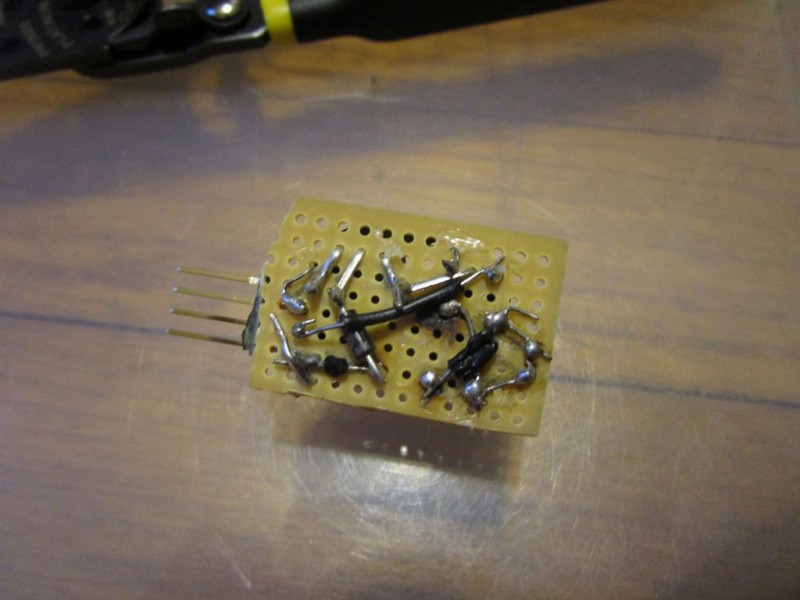

После того, как детали размещены на плате, проводим пайку согласно схеме представленной выше, и используем для этого любые удобные вам паяльник и припой. В качестве дорожек используйте кусочки провода, для близко стоящих контактов — не изолированные отрезки провода, а для далеко стоящих — изолированные перемычки, зачищенные с обоих концов. Омедненая макетная мозгоплата конечно лучше подойдет для наших целей, но обычная плата дешевле. Так же на этом этапе можно припаять провода мотора или как я, 2-х штырьковый разъем.
Шаг 4:Обрезка платы

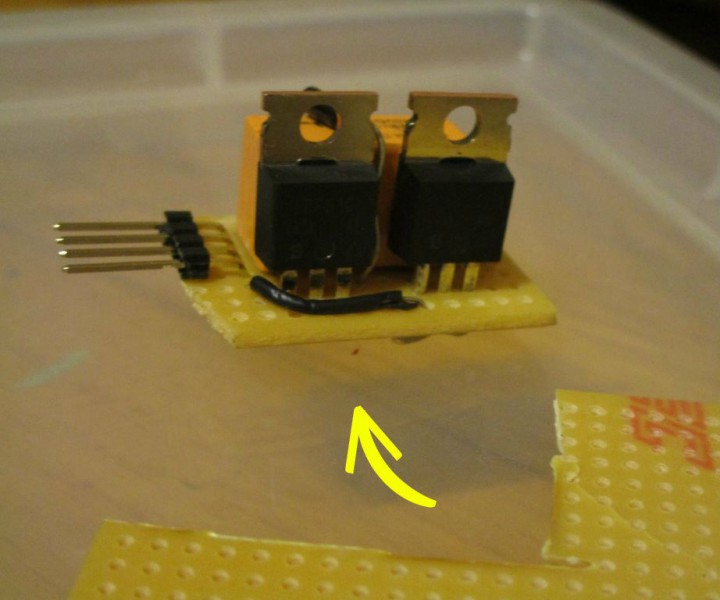
Собранную поделку нужно вырезать из листа макетной платы, это позволит использовать ее в небольших устройствах, таких как контроллеры или роботы. Свою я обрезал по минимуму, но вы можете сделать это до необходимых вам размеров и использовать согласно вашим мозгозадумкам. Просто не повредите работоспособность контроллера-самоделки, не нарушайте контактов и дорожек. Используйте для обрезки дремель или небольшую пилку, для меня бормашинка была наиболее удобным вариантом, но вы действуйте по своему усмотрению. И в заключение этого этапа убедитесь в совместимости контактов поделки с другими платами или разъемами.
Шаг 5: Доработка

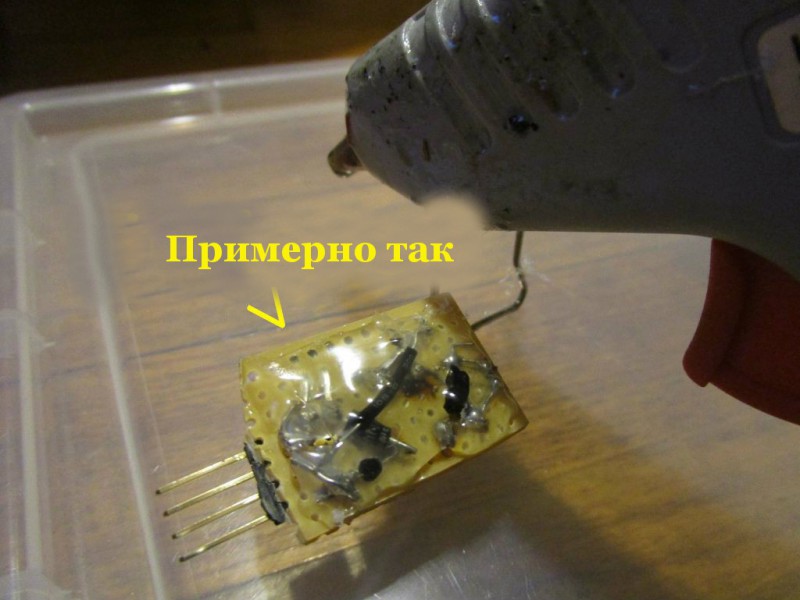
Шаг 6: Контроллер готов, используем его!
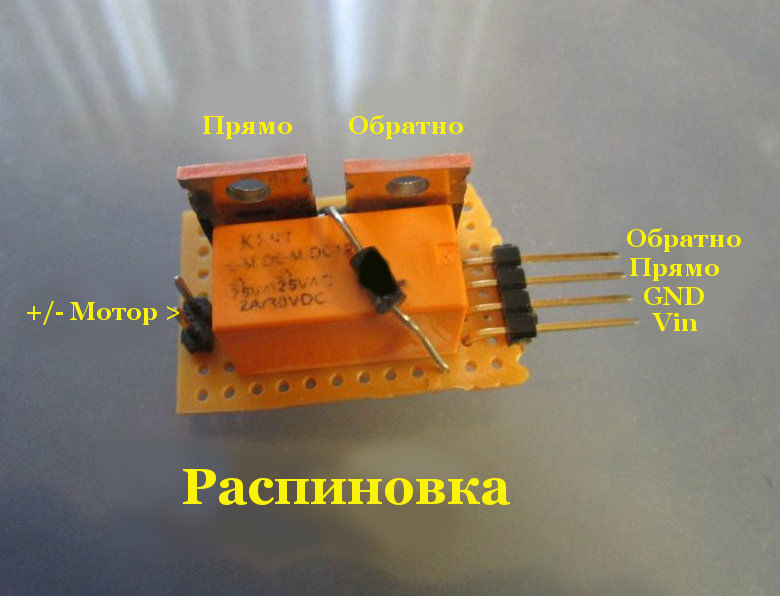

Самоделка собрана, можно интегрировать ее в другие проекты, но перед этим не мешает разобраться с контактами. Если вы следовали моим мозгоинструкциям, то назначение контактов как на фото, если компоновка ваших деталей отличается, то смотрите схему и выявляйте вашу распиновку.
Читайте также: