
Компьютер на avr своими руками
Обновлено: 07.07.2024
Схемы, устройства и проекты на микроконтроллерах ATtiny и ATmega (семейство AVR). Для каждого проекта приведен текст программы на языке С (Си) с комментариями, что позволяет начинающим радиолюбителям на конкретных примерах научиться программированию данных микроконтроллеров
Цифровой измеритель расстояния ("линейка") на ATtiny85

Цифровое измерение расстояний в настоящее время находит широкое применение в системах контроля движения транспортных средств, медицине, устройствах для слабовидящих и т.д. Наиболее дешевым способом измерения расстояний является использование для этой цели ультразвуковых датчиков, среди которых наиболее распространен датчик HC-SR04. В … Читать далее →
Карта статей по микроконтроллерам AVR

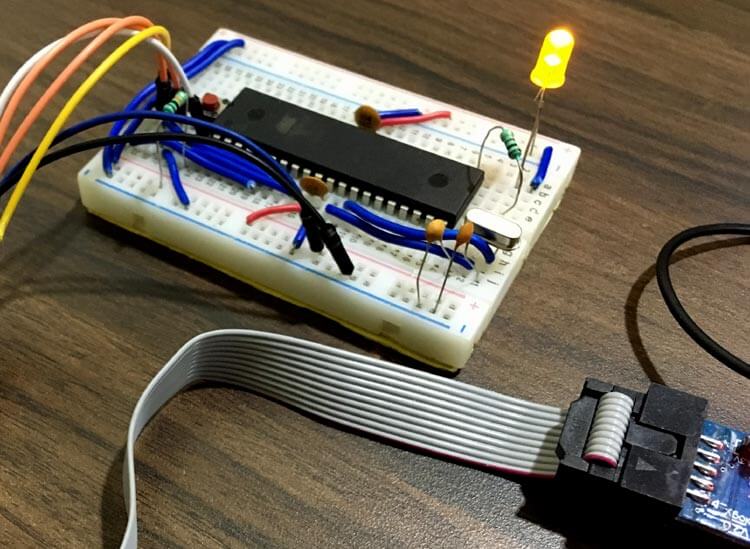
Программирование ATtiny85 с помощью платы Arduino Uno

Микроконтроллер ATtiny85 является удобной и сравнительно мощной альтернативой старшим моделям микроконтроллеров семейства AVR. Его применение особенно оправданно в тех случаях, когда вы стремитесь к минимизации размеров вашего устройства. Микросхема ATtiny85 содержит 8 контактов – 6 контактов ввода/вывода (включая Reset) и … Читать далее →
USB программатор для ATtiny85 на основе загрузчика Digispark

Счетчик шагов (шагомер) на ATtiny85 и акселерометре MPU6050
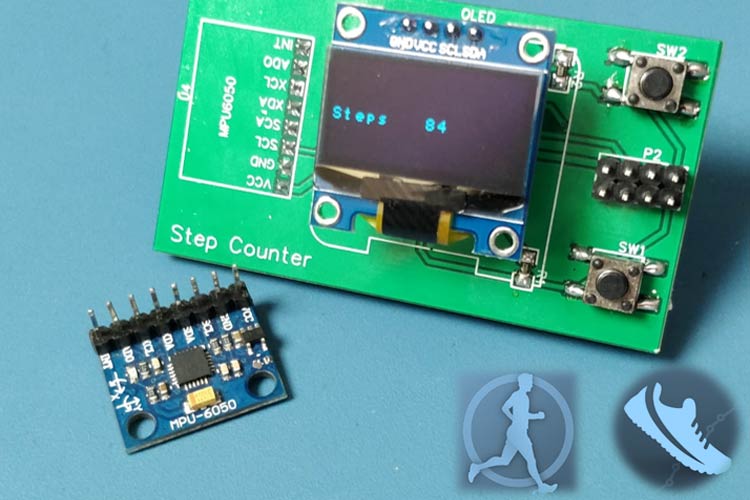
В этой статье мы рассмотрим создание портативного счетчика шагов (шагомера) на основе микроконтроллера AVR ATtiny85, акселерометра и гироскопа MPU6050, и OLED дисплея. Питание на шагомер будет подавать от простой батарейки на 3V, что позволяет сделать его достаточно компактным и удобным … Читать далее →
Подключение GPS модуля к микроконтроллеру AVR ATmega16/32
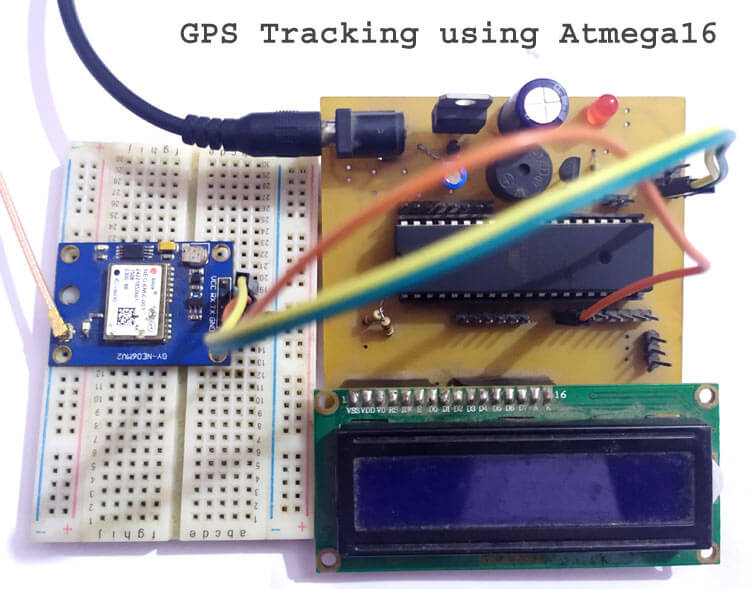
GPS модули широко используются в современной электронике для определения местоположения, основываясь на координатах долготы и широты. Системы мониторинга транспортных средств, часы GPS, системы предупреждения о чрезвычайных происшествиях, системы наблюдения – это лишь небольшой список приложений, в которых может потребоваться технология … Читать далее →
Биометрическая система сканирования отпечатков пальцев на микроконтроллере AVR ATmega32
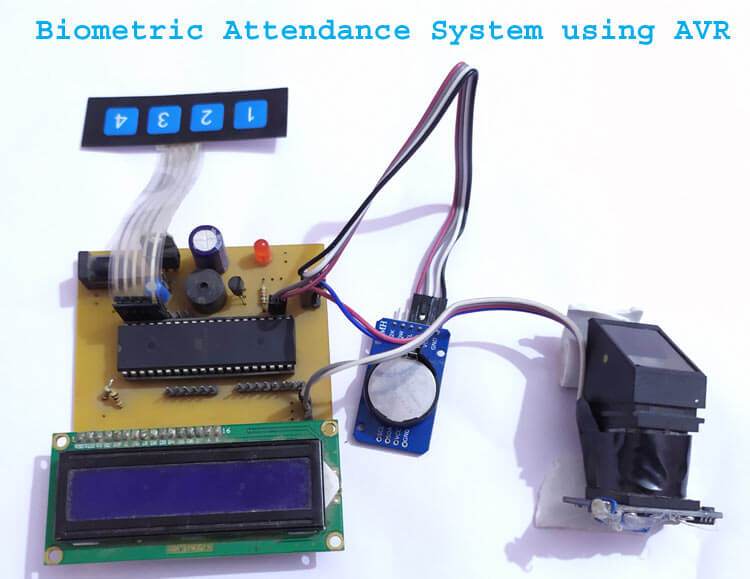
Как показывают многочисленные исследования в современном мире люди более склонны доверять машинам нежели другим людям. Сейчас, когда в мире активно развиваются такие технологии как искусственный интеллект, машинное обучение, чат-боты, синергия (совместная деятельность) между людьми и роботами с каждым годом все … Читать далее →
Подключение двигателя постоянного тока к микроконтроллеру AVR ATmega16

Двигатели постоянного тока относятся к числу наиболее часто используемых двигателей. Их можно встретить где угодно – начиная от простейших конструкций до продвинутой робототехники. В этой статье мы рассмотрим подключение двигателя постоянного тока к микроконтроллеру ATmega16 (семейство AVR). Но сначала немного … Читать далее →
Подключение датчика Холла к микроконтроллеру AVR ATmega16
Использование широтно-импульсной модуляции (ШИМ) в микроконтроллерах AVR ATmega16
Широтно-импульсная модуляция (сокр. ШИМ, от англ. PWM — Pulse Width Modulation) является технологией, позволяющей изменять ширину импульсов в то время как частота следования импульсов остается постоянной. В настоящее время она применяется в разнообразных системах контроля и управления, а также в … Читать далее →


В наше время все больше находят применение устройства, позволяющие управлять нагрузками с помощью ПК. Обычно это некий коммутатор силовых нагрузок, подключаемый к компьютеру и специальное программное обеспечение.
Встречаются готовые образцы, которые позволяют управлять нагрузками удаленно через интернет, например, давая возможность включать свет, ТЭНы в бане, различные клапаны и т.д. Современные технологии позволяют делать устройства миниатюрными и быстродействующими.
Описанное в статье устройство создавалось в рамках учебного курса университета в виде курсового проекта, поэтому начну с самого начала.
Содержание / Contents
↑ Анализ
Для решения задачи я решил применить микроконтроллер, который должен иметь на борту приемопередатчик UART и минимум три свободных порта для трёх каналов управления (количество их может быть увеличено и зависит от числа нагрузок). Вполне подходящим оказался микроконтроллер семейства AVR - ATMega8, как самый распространенный и недорогой.
Для создания связи устройства через USB-порт с ПК я использовал аппаратный преобразователь USB-UART с использованием микросхемы FT232RL.
↑ Схема структурная

Тут все очень просто и почти не требует пояснения. Вся электрическая часть устройства состоит из следующих элементов:
a) Блок управления включения/выключения нагрузки
b) Микроконтроллер
c) Преобразователь USB – UART
d) ПК и программа управления устройством
↑ Схема электрическая принципиальная
Исключён фрагмент. Полный вариант статьи доступен меценатам и полноправным членам сообщества. Читай условия доступа.
↑ А как же это все должно работать?
Подойдя к стадии написания программного обеспечения для МК я задался вопросом, а как же это все будет работать. Немного подумав, я решил, что алгоритм работы должен выглядеть следующим образом:

После включения микроконтроллера (его подключения к ПК), инициализируется его работа, устанавливается режим работы приемо-передатчика UART, после чего разрешаются прерывания и МК ждет приема данных от программы, запущенной на ПК.
↑ Прошивка для МК
Программа, отвечающая за работу МК написана с использованием WinAVR и отлаживалась виртуально на ПК при помощи пакета ISIS 7 Professional. Увидеть исходный код и получить готовую прошивку можно скачав архив внизу статьи.
Если кому-то будет интересен результат компиляции кода, то он представлен ниже:
Program: 1666 bytes (20.3% Full)
(.text + .data + .bootloader)
dаta: 581 bytes (56.7% Full)
(.data + .bss + .noinit)
Compiling C: ra1.c
avr-gcc -c -mmcu=atmega8 -I. -gstabs -DF_CPU=7372800UL -Os -funsigned-char -funsigned-bitfields -fpack-struct -fshort-enums -Wall -Wstrict-prototypes -Wa,-adhlns=./ra1.lst -std=gnu99 -MMD -MP -MF .dep/ra1.o.d ra1.c -o ra1.o
Linking: ra1.elf
avr-gcc -mmcu=atmega8 -I. -gstabs -DF_CPU=7372800UL -Os -funsigned-char -funsigned-bitfields -fpack-struct -fshort-enums -Wall -Wstrict-prototypes -Wa,-adhlns=ra1.o -std=gnu99 -MMD -MP -MF .dep/ra1.elf.d ra1.o --output ra1.elf -Wl,-Map=ra1.map,--cref -lm
Creating load file for Flash: ra1.hex
avr-objcopy -O ihex -R .eeprom -R .fuse -R .lock ra1.elf ra1.hex
Creating load file for EEPROM: ra1.eep
avr-objcopy -j .eeprom --set-section-flags=.eeprom="alloc,load" \
--change-section-lma .eeprom=0 --no-change-warnings -O ihex ra1.elf ra1.eep || exit 0
Creating Extended Listing: ra1.lss
avr-objdump -h -S -z ra1.elf > ra1.lss
Creating Symbol Table: ra1.sym
avr-nm -n ra1.elf > ra1.sym
Converting to AVR Extended COFF: ra1.cof
avr-objcopy --debugging --change-section-address .data-0x800000 --change-section-address .bss-0x800000 --change-section-address .noinit-0x800000 --change-section-address .eeprom-0x810000 -O coff-ext-avr ra1.elf ra1.cof
Discarding local symbol outside any compilation unit: .do_copy_data_start
Discarding local symbol outside any compilation unit: .do_copy_data_loop
Discarding local symbol outside any compilation unit: .do_clear_bss_start
Discarding local symbol outside any compilation unit: .do_clear_bss_loop
avr-objcopy: --change-section-vma .eeprom+0xff7f0000 never used
avr-objcopy: --change-section-lma .eeprom+0xff7f0000 never used
avr-objcopy: --change-section-vma .noinit+0xff800000 never used
avr-objcopy: --change-section-lma .noinit+0xff800000 never used
Size after:
AVR Memory Usage
----------------
Device: atmega8
Program: 1666 bytes (20.3% Full)
(.text + .data + .bootloader)
dаta: 581 bytes (56.7% Full)
(.data + .bss + .noinit)
> Process Exit Code: 0
> Time Taken: 00:04
↑ Программа для ПК

В верхнем разделе меню я добавил небольшую справку о том, как должно быть сконфигурировано подключенное к ПК устройство.

В общем, программа получилась такой как я хотел, хотя осталась еще пара идей, которые хотелось бы реализовать позднее.
Для работы программы COM-порт необходимо настроить следующим образом:
Baund Rate - 9600
Data bits - 8
Stop Bits - 1
↑ Сборка

Проект был собран на монтажной плате, ПП не разрабатывалась. Прилагаю к статье файл модели в Proteus 7.6 SP4.
↑ Заключение
В заключении хочется сказать, что работа над проектом продолжается.
В планах:
• реализация FIFO,
• наращивание числа коммутаторов,
• доработка управляющего ПО
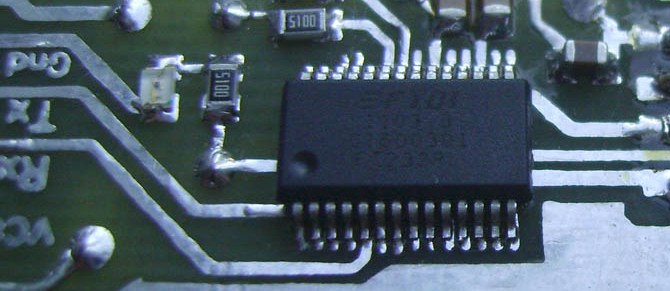
Хотя мой старенький стационарник не обделен самым настоящим COM портом, не всегда удобно привязываться к одному компьютеру, если требуется подключить какое-либо устройство на микроконтроллере. Учитывая мою любовь использовать в своих проектах UART, решил собрать модуль преобразователя USB-UART на микросхеме FT232RL. Преобразователь позволяет создать соединение на любом компьютере имеющем USB разъем, тобишь на любом.
Обвязка FT232RL минимальна, для работы устройства, помимо самой микросхемы, требуется пара конденсаторов. Также для индикации работы можно повесить 3 светодиода, которые будут сигнализировать о наличии питания, приеме и передаче данных. Само устройство собрано в форме флэшки, поэтому приткнутся к USB-порту можно в любой момент. На выходе устройства на разъем выведены пины Tx и Rx, с логическими уровнями TTL, а также питание +5В, которым можно запитывать подключаемое устройство.

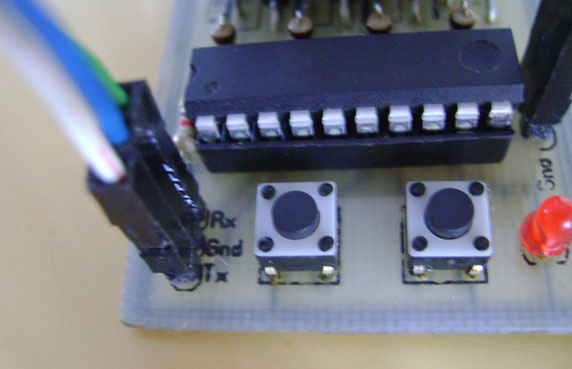
Для планируемых проектов, с использованием дисплея от Nokia3310, собрал что-то типа универсального модуля на микроконтроллере Atmega32 в корпусе TQFP. Платка получилась компактная, размерами 60х45 мм. Из периферии имеются 4 кнопки и один светодиод. Я старался задействовать для подключения дисплея и кнопок менее важные выводы микроконтроллера, чтобы оставалась возможность использовать UART, ШИМ, АЦП, внешние прерывания, внутренний компаратор и прочие ништяки.

Достаточно часто появляется необходимость использовать управление какого-нибудь устройства (будь то лампочка накаливания, двигатель, ТЭН или простой светодиод) посредством ШИМ.
Наверно объяснять что это такое и в чем прелесть управления ШИМом не нужно, информации в интернете накопилось уже достаточно много, да и врядли мне получиться разжевать эту тему лучше. Поэтому сразу перейдем к делу, а именно запустим ШИМ на Attiny2313 средствами Bascom-AVR.
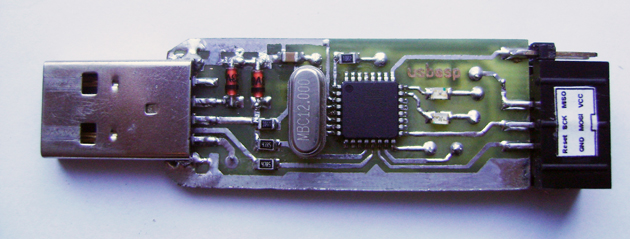
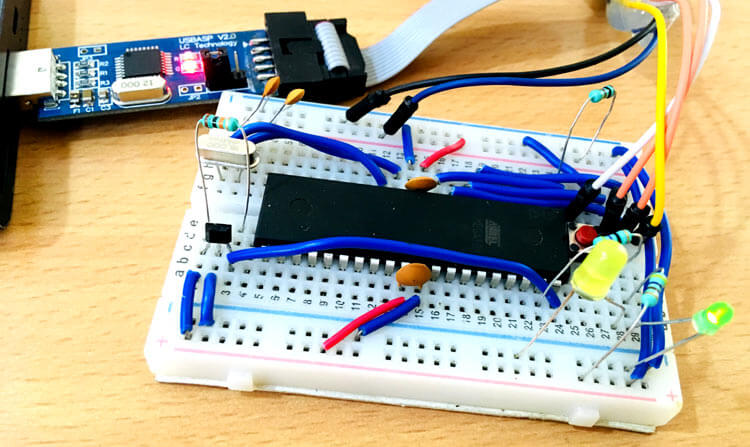
Решил заменить свою рабочую лошадку STK200+PonyProg, на нечто более современное, легко собираемое и обязательно поддерживающее подключение по USB. Выбор пал на хорошо зарекомендовавший себя программатор USBASP, мозгом которого служит микроконтроллер Atmega8 (так же есть варианты прошивки под atmega88 и atmega48) . Минимальная обвязка микроконтроллера позволяет собрать достаточно миниатюрный программатор, который всегда можно взять с собой, как флэшку. Еще одним плюсом программатора является то, что благодаря большой популярности он приобрел поддержку во многих средствах разработки, в том числе и в Bascom-AVR начиная с версии 1.11.9.6. И поэтому консольность программы, с которой он работал первоначально, перестала быть отпугивающим моментом для начинающих.

Когда любой проект растет в функционале, и из простого показометра хочется сделать нечто большее, нужно придумать, как организовать удобную работу с устройством. Хорошо если в проекте задействован дисплей (графический, алфавитно-цифровой, да хоть семисегментный) тогда можно создать свое меню и рулить настройками оттуда. Вот и попробуем организовать несложное древовидное меню из небольшого списка, с возможностью выбора любого пункта. Для начала необходимо определится с организацией и количеством пунктов меню и нарисовать структурную схему. Например, сделаем меню из 4-х пунктов, в каждом из которых по 3 подпункта.

В процессе написания программы часто необходимо проверить правильность работы алгоритма – глянуть на состояние регистров, узнать значение переменных или состояние портов вывода. Хотя сам для этих целей и использую Proteus , бывало такое, что его нет под рукой. И поэтому выручает симулятор, который включен в Bascom - AVR .
В качестве примера для симуляции взял программу с модуля дистанционного управления, описанного в прошлой статье. По алгоритму программа должна обрабатывать нажатие кнопки, висящей на прерывании INT 1. При нажатии на кнопку изменяется (увеличивается) значение переменной Flag , значение которое может принимать эта переменная от 1 до 7, при достижении значения 8 переменная обнуляется. Пока переменная больше 0, на выводе Port D .4 находится высокий уровень напряжения (логическая единица).
Также по задумке, при значении переменной Flag больше 0, на одном из выходов Port B будет единичка. При каждом нажатии кнопки и увеличении переменной, эта единичка должна сдвигаться вправо – то есть при значении Flag =1 единица будет на Port B .7 , при Flag =2 единица будет на Port B . 6 и так далее пока нажимая кнопку мы не достигнем значения Flag =8 ; а как писал выше, достигнув этого значения, переменная обнуляется и состояние выходов Port D .4 и Port B сбрасываются в ноль. При последующих нажатия кнопки все повторяется. Для понятия алгоритма можно посмотреть видео со статьи озвученной выше.
Итак, алгоритм есть, код написан и теперь необходимо проверить соответствие кода алгоритму - переходим к симуляции внутренними средствами Bascom - AVR.

Если встает вопрос дистанционно управлять каким-нибудь девайсом, сразу видится два решения: применить радиоканал, использовав RF модули, или использовать управление с использованием инфракрасных лучей. Когда требуется управлять устройством на небольшом расстоянии (например, в пространстве одной комнаты) и с минимальными вложениями чаще всего достаточно будет применить управление по инфракрасному каналу, ведь для этого требуется всего-навсего инфракрасный датчик TSOP c обвязкой из пары резисторов, и пульт управления, который дома у каждого найдется и даже не один. А благодаря хорошему свойству IR излучения отражаться от поверхности – прямая видимость между передатчиком и приемником не является жестким требованием. Вот и попробуем поработать с этим видом связи. Связь между пультом и девайсом будет обеспечиваться посредством общепринятого стандарта для пультов – RC5. С этим протоколом Bascom-AVR знаком и прекрасно с ним работает. Для примера собрал модуль управления на мк ATTiny2313 – по сути – приемник команд стандарта RC5 способный запоминать, сохранять в энергонезависимой памяти и обслуживать до 7 команд.

Особенностью работы датчика температуры DS18b20 , рассмотренного в предыдущей статье является то, что от запроса на преобразование до чтения значения температуры должно пройти определенное время (не менее 0,75 сек по даташиту). Это время требуется датчику для преобразования аналогового сигнала в цифровую форму, к тому же при частом опросе возможен нагрев датчика, что вызовет искажение показаний. Для совместной работы с семисегментным индикатором необходимо учитывать, что индикация происходит в динамическом режиме и поэтому запихивать запуск преобразования и чтение результата в один цикл с обработкой индикации не следует. Иначе индикация во время ожидания преобразования заглохет и вывод показаний прекратится, что вызовет моргание индикатора.
Чтобы этого избежать можно индикацию оставить в главном цикле, а работу с датчиком повесить в обработчик прерывания от таймера. Таким образом распараллелить задачу – пока датчик ведет преобразование микроконтроллер обрабатывает индикацию. Тут я поступил практически также: в главном цикле происходит вывод текущей температуры на индикатор, когда очередь доходит до работы с датчиком, проверяется переменная отвечающая за то, что нужно сделать – начать преобразование или считать результат преобразования. Значение этой переменной изменяется в обработчике прерывания от таймера (каждые 0,5 сек). Таким образом, работа с датчиком и динамическая индикация находятся в одном цикле, но за один цикл выполняется либо преобразование, либо чтение результата или работа с датчиком пропускается совсем. В качестве таймера задействован Timer1 с предделителем на 64, таким образом при частоте работы МК 8 МГц переполнение и изменение переменной будет происходить каждые 0,52 сек. Как оказалось такая задержка вполне приемлема для нормальной работы датчика DS18b20.
Представляю вашему вниманию доработанную программу управления униполярным шаговым двигателем к контроллеру описанному в прошлой статье. Теперь контроллер способен принимать команды по UART и делать необходимое количество шагов в нужном направлении. Направление вращения и необходимое количество шагов задается одной командой. Например чтобы сделать 300 шагов в одну сторону отправляем команду +300. Если требуется вращать в другую сторону, отправляем "-" и количество шагов, все просто. Также как и в прошлой версии программы, предусмотрено вращение двигателя кнопками.
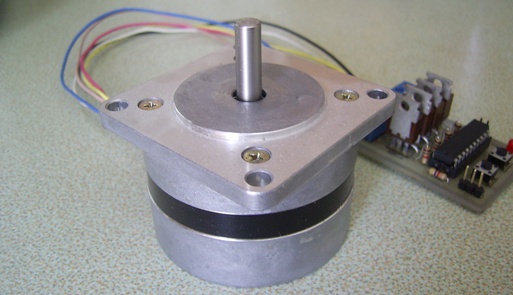
Шаговые двигатели достаточны распространены в устройствах, в которых необходимо добиться точного перемещения механизмов. Существует много типов шаговых двигателей, но самыми дружелюбными в плане управления являются 2-х фазные униполярные двигатели. Этот тип двигателей имеет две независимые обмотки с выводами от середины. Их можно встретить преимущественно в старой технике: принтерах, копирах, дисководах (5-и дюймовых) и еще много где.
Поделки с микроконтроллерами – вопрос, как никогда актуальный и интересный. Ведь мы живем в 21 веке, эпохе новых технологий, роботов и машин. На сегодняшний день каждый второй, начиная с малого возраста, умеет пользоваться интернетом и различного рода гаджетами, без которых порою и вовсе сложно обойтись в повседневной жизни.
Поэтому в этой статье мы будем затрагивать, в частности, вопросы пользования микроконтроллерами, а также непосредственного применения их с целью облегчения миссий, каждодневно возникающих перед всеми нами. Давайте разберемся, в чем ценность этого прибора, и как просто использовать его на практике.

Микроконтроллер и его предназначение
Микроконтроллер − это чип, целью которого является управление электрическими приборами. Классический контроллер совмещает в одном кристалле, как работу процессора, так и удаленных приборов, и включает в себя оперативное запоминающее устройство. В целом, это монокристальный персональный компьютер, который может осуществлять сравнительно обыкновенные задания.
Из этого следует, что применить такое устройство можно в технике для вычисления, такой, как калькулятор, материнка, контроллеры компакт-дисков. Используют их также в электробытовых аппаратах – это и микроволновки, и стиральные машины, и множество других. Также микроконроллеры широко применяются в индустриальной механике, начиная от микрореле и заканчивая методиками регулирования станков.
Микроконроллеры AVR
Ознакомимся с более распространенным и основательно устоявшимся в современном мире техники контроллером, таким как AVR. В его состав входят высокоскоростной RISC-микропроцессор, 2 вида затратной по энергии памяти (Flash-кэш проектов и кэш сведений EEPROM), эксплуатационная кэш по типу RAM, порты ввода/вывода и разнообразные удаленные сопряженные структуры.

- рабочая температура составляет от -55 до +125 градусов Цельсия;
- температура хранения составляет от -60 до +150 градусов;
- наибольшая напряженность на выводе RESET, в соответствии GND: максимально 13 В;
- максимальное напряжение питания: 6.0 В;
- наибольший электроток линии ввода/вывода: 40 мА;
- максимальный ток по линии питания VCC и GND: 200 мА.
Возможности микроконтроллера AVR
Абсолютно все без исключения микроконтроллеры рода Mega обладают свойством самостоятельного кодирования, способностью менять составляющие своей памяти драйвера без посторонней помощи. Данная отличительная черта дает возможность формировать с их помощью весьма пластичные концепции, и их метод деятельности меняется лично микроконтроллером в связи с той либо иной картиной, обусловленной мероприятиями извне или изнутри.
Обещанное количество оборотов переписи кэша у микроконтроллеров AVR второго поколения равен 11 тысячам оборотов, когда стандартное количество оборотов равно 100 тысячам.
Конфигурация черт строения вводных и выводных портов у AVR заключается в следующем: целью физиологического выхода имеется три бита регулирования, а никак не два, как у известных разрядных контроллеров (Intel, Microchip, Motorola и т. д.). Это свойство позволяет исключить потребность обладать дубликатом компонентов порта в памяти с целью защиты, а также ускоряет энергоэффективность микроконтроллера в комплексе с наружными приборами, а именно, при сопутствующих электрических неполадках снаружи.

Всем микроконтроллерам AVR свойственна многоярусная техника пресечения. Она как бы обрывает стандартное течение русификатора для достижения цели, находящейся в приоритете и обусловленной определенными событиями. Существует подпрограмма преобразования запрашивания на приостановление для определенного случая, и расположена она в памяти проекта.
Когда возникает проблема, запускающая остановку, микроконтроллер производит сохранение составных счетчика регулировок, останавливает осуществление генеральным процессором данной программы и приступает к совершению подпрограммы обрабатывания остановки. По окончании совершения, под шефствующей программы приостановления, происходит возобновление заранее сохраненного счетчика команд, и процессор продолжает совершать незаконченный проект.
Поделки на базе микроконтроллера AVR
Поделки своими руками на микроконтроллерах AVR становятся популярнее за счет своей простоты и низких энергетических затрат. Что они собой представляют и как, пользуясь своими руками и умом, сделать такие, смотрим ниже.
"Направлятор"
Такое приспособление проектировалось, как небольшой ассистент в качестве помощника тем, кто предпочитает гулять по лесу, а также натуралистам. Несмотря на то, что у большинства телефонных аппаратов есть навигатор, для их работы необходимо интернет-подключение, а в местах, оторванных от города, это проблема, и проблема с подзарядкой в лесу также не решена. В таком случае иметь при себе такое устройство будет вполне целесообразно. Сущность аппарата состоит в том, что он определяет, в какую сторону следует идти, и дистанцию до нужного местоположения.
Важно: прежде чем уходить, нужно сохранить место отправки, куда после надо возвратиться, и стрелка будет показывать на эту точку, но это будет выполнено лишь при условии работы спутников.
Построение схемы осуществляется на основе микроконтроллера AVR с тактированием от наружного кварцевого резонатора на 11,0598 МГц. За работу с GPS отвечает NEO-6M от U-blox. Это, хоть и устаревший, но широко известный и бюджетный модуль с довольно четкой способностью к установлению местонахождения. Сведения фокусируются на экране от Nokia 5670. Также в модели присутствуют измеритель магнитных волн HMC5883L и акселерометр ADXL335.

Измеритель магнитных волн HMC5883L
Беспроводная система оповещения с датчиком движения
Полезное устройство, включающее в себя прибор перемещения и способность отдавать, согласно радиоканалу, знак о его срабатывании. Конструкция является подвижной и заряжается с помощью аккумулятора или батареек. Для его изготовления необходимо иметь несколько радиомодулей HC-12, а также датчик движения hc-SR501.
Прибор перемещения HC-SR501 функционирует при напряжении питания от 4,5 до 20 вольт. И для оптимальной работы от LI-Ion аккумулятора следует обогнуть предохранительный светодиод на входе питания и сомкнуть доступ и вывод линейного стабилизатора 7133 (2-я и 3-я ножки). По окончанию проведения этих процедур прибор приступает к постоянной работе при напряжении от 3 до 6 вольт.

Датчик движения HC-SR501
Внимание: при работе в комплексе с радиомодулем HC-12 датчик временами ложно срабатывал. Во избежание этого необходимо снизить мощность передатчика в 2 раза (команда AT+P4). Датчик работает на масле, и одного заряженного аккумулятора, емкостью 700мА/ч, хватит свыше, чем на год.
Минитерминал
Приспособление проявило себя замечательным ассистентом. Плата с микроконтроллером AVR нужна, как фундамент для изготовления аппарата. Из-за того, что экран объединён с контроллером непосредственно, то питание должно быть не более 3,3 вольт, так как при более высоких числах могут возникнуть неполадки в устройстве.

Преобразователь LM2577
Вам следует взять модуль преобразователя на LM2577, а основой может стать Li-Ion батарея емкостью 2500мА/ч. Выйдет дельная комплектация, отдающая постоянно 3,3 вольта во всём трудовом интервале напряжений. С целью зарядки применяйте модуль на микросхеме TP4056, который считается бюджетным и достаточно качественным. Для того чтобы иметь возможность подсоединить минитерминал к 5-ти вольтовым механизмам без опаски сжечь экран, необходимо использовать порты UART.
Основные аспекты программирования микроконтроллера AVR
Кодирование микроконтоллеров зачастую производят в стиле ассемблера или СИ, однако, можно пользоваться и другими языками Форта или Бейсика. Таким образом, чтобы по факту начать исследование по программированию контроллера, следует быть оснащенным следующим материальным набором, включающим в себя: микроконтроллер, в количестве три штуки — к высоковостребованным и эффективным относят — ATmega8A-PU, ATtiny2313A-PU и ATtiny13A- PU.
Чтобы провести программу в микроконтроллер, нужен программатор: лучшим считают программатор USBASP, который дает напряжение в 5 Вольт, используемое в будущем. С целью зрительной оценки и заключений итогов деятельности проекта нужны ресурсы отражения данных − это светодиоды, светодиодный индуктор и экран.

Программатор USBASP 2.0
Чтобы исследовать процедуры коммуникации микроконтроллера с иными приборами, нужно числовое приспособление температуры DS18B20 и, показывающие правильное время, часы DS1307. Также важно иметь транзисторы, резисторы, кварцевые резонаторы, конденсаторы, кнопки.
С целью установки систем потребуется образцовая плата для монтажа. Чтобы соорудить конструкцию на микроконтроллере, следует воспользоваться макетной платой для сборки без пайки и комплектом перемычек к ней: образцовая плата МВ102 и соединительные перемычки к макетной плате нескольких видов — эластичные и жесткие, а также П-образной формы. Кодируют микроконтроллеры, применяя программатор USBASP.
Простейшее устройство на базе микроконтроллера AVR. Пример
Итак, ознакомившись с тем, что собой представляют микроконтроллеры AVR, и с системой их программирования, рассмотрим простейшее устройство, базисом для которого служит данный контроллер. Приведем такой пример, как драйвер низковольтных электродвигателей. Это приспособление дает возможность в одно и то же время распоряжаться двумя слабыми электрическими двигателями непрерывного тока.
Предельно возможный электроток, коим возможно загрузить программу, равен 2 А на канал, а наибольшая мощность моторов составляет 20 Вт. На плате заметна пара двухклеммных колодок с целью подсоединения электромоторов и трехклеммная колодка для подачи усиленного напряжения.
Устройство выглядит, как печатная плата размером 43 х 43 мм, а на ней сооружена минисхемка радиатора, высота которого 24 миллиметра, а масса – 25 грамм. С целью манипулирования нагрузкой, плата драйвера содержит около шести входов.
Заключение
В заключение можно сказать, что микроконтроллер AVR является полезным и ценным средством, особенно, если дело касается любителей мастерить. И, правильно использовав их, придерживаясь правил и рекомендаций по программированию, можно с легкостью обзавестись полезной вещью не только в быту, но и в профессиональной деятельности и просто в повседневной жизни.
Читайте также: