
Какие шаговые двигатели нужны для чпу станка своими руками
Обновлено: 07.07.2024
Ответ: Шаговые двигатели - это устройства, задача которых преобразование электрических импульсов в поворот вала двигателя на определенный угол. В отличие от обычных двигателей, шаговые двигатели имеют особенности, которые определяют их свойства при использовании в специализированных областях: управляя шаговым двигателем с помощью специального устройства (драйвер шагового двигателя), можно поворачивать его вал на строго заданный угол. Это позволяет применять его там, где требуется высокая точность перемещений. Наглядные примеры это принтеры, факсы, копировальные машины, станки с ЧПУ (Числовое программное управление), фрезерные, гравировальные машины, модули линейного перемещения, плоттеры, установщики радиоэлектронных компонентов. Шаговый двигатель является бесколлекторным двигателем постоянного тока. Как и другие бесколлекторные двигатели, шаговый двигатель высоконадежен и при надлежащей эксплуатации имеет длительный срок службы. Далее: подробно о строении шагового двигателя
Вопрос: Какие достоинства у шаговых двигателей?
Ответ: Достоинства истекают из особенностей конструкции: - Шаговый двигатель может обеспечить очень точное перемещение на заданный угол, причем без обратной связи - поворот ротора зависит от числа поданных импульсов на устройство управления; - высокая точность позиционирования и повторяемость, так качественные шаговые двигатели имеют точность не хуже 5% от величины шага, при этом данная ошибка не накапливается; - хорошая надежность двигателя, обусловленная отсутствием щеток, при этом срок службы двигателя ограничивается лишь ресурсом подшипников; - обеспечивает получение сверхнизких скоростей вращения вала без использования редуктора; - работа в широком диапазоне скоростей, т.к. скорость напрямую зависит от количества входных импульсов. Недостатки - шаговый двигатель подвержен резонансу; - может пропустить шаги и реальная позиция вала окажется рассинхронизирована с позицией, заданной в управляющей системе - низкая удельная мощность шагового привода; - потребляемая энергия не уменьшается при отсутствии нагрузки; - малый момент на высоких скоростях;
Вопрос: Какие бывают шаговые двигатели?
Ответ: Шаговых двигателей существует множество разновидностей. В настоящее время 95% всех шаговых двигателей - гибридные. В зависимости от конфигурации обмоток двигатели делятся: а)Биполярный - имеет четыре выхода, содержит в себе две обмотки. б)Униполярный - имеет шесть выходов. Содержит в себе две обмотки, но каждая обмотка имеет отвод из середины. в)Четырехобмоточный - имеет четыре независимые обмотки. Можно представлять его как униполярный, обмотки которого разъединены, а если соединить соседние отводы - получим биполярный двигатель.
В зависимости от типа электронного коммутатора управление шаговым двигателем может быть: однополярным или разнополярным; симметричным или несимметричным; ·потенциальным или импульсным. При однополярном управлении напряжение каждой фазе изменяется от 0 до +U, а при разнополярном – от -U до +U. Управление называется симметричным, если в каждом такте коммутации задействуется одинаковое число обмоток, и несимметричным – если разное.
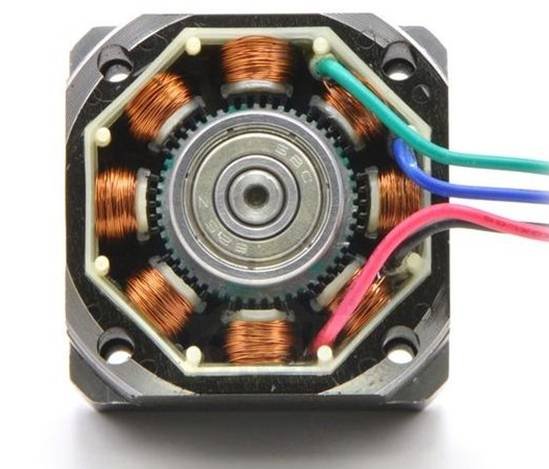
Вопрос: Корпус у меня не разборный, а хочется посмотреть что внутри!
Ответ: Внутри находятся обмотки, зубчатый ротор и несколько подшипников. Не стоит разбирать рабочий двигатель. Ротор устанавливается с малым зазором, кроме того, система ротор-статор образует замкнутый магнитопровод, который намагничивается в собранном состоянии, и двигатель после разборки теряет существенную часть момента.
Вопрос: На какой минимальный угол может повернуться шаговый двигатель?
Вопрос: Какие существуют программы для работы с шаговыми двигателями?
Ответ: Их существует множетсво как перемещение на определенный шаг, так для трехмерного использования. Могут управлять от одного до шести двигателей. Например MACH3, LinuxCNC, Turbocnc, NC Studio.
Вопрос: Как можно повысить точность вращения вала шагового двигателя?
Вопрос: Что означают характеристики шагового двигателя - ток, индуктивность, напряжение и т.п.?
Ответ: Все характеристики двигателя находятся в тесной взаимосвязи и определяют главную - кривую зависимости крутящего момента от скорости. Рассматривать влияение характеристик надо для двигателей одного размера. Момент удержания - пиковое значение крутящего момента двигателя - зависит от тока и индуктивности обмотки. Чем больше индуктивность, тем больший момент удержания можно развить, но тем больше требуется напряжение питания на высоких скоростях, чтобы преодолеть индуктивное сопротивление и закачать нужный ток в обмотку. Ток обмотки также определяет выбор драйвера шагового двигателя. Напряжение питания обмотки равно U = I*R, номинальному току обмотки умноженному на напряжение и показывает, какое постоянное напряжение надо подать на обмотку, чтобы получить номинальный ток и, соответственно, момент удержания. Величина напряжения используется при выборе драйвера и характеристик источника питания.
Вопрос: Какой шаговый двигатель лучше, А или Б?
Ответ: Этот вопрос неоднозначен, но все же дадим пару рекомендаций. Как правило, ориентироваться надо не на момент удержания, а на индуктивность. Лучше работают те двигатели, у которых индуктивность меньше - большинство задач требуют момента на высоких скоростях, и малая индуктивность требует меньшего напряжения питания. Нормальной индуктивностью можно считать 2-5 мГн для двигателей NEMA23 (фланец 57 мм), 4-6 мГн для двигателей NEMA34 (фланец 86 мм). Если А и Б - двигатели разного размера, смотрите кривую зависимости момента от скорости - чем она более пологая, тем лучше. См. более подробный алгоритм выбора шагового двигателя.
Вопрос: Что такое драйвер управления шаговым двигателем?
Ответ: Драйверы шаговых двигателей используются для управления биполярными и униполярными шаговыми двигателями с полным шагом, половинным и микрошагом. Они действуют как посредники между компьютером и двигателем и должны подбираться по напряжению и уровню мощности, типу сигнала (аналоговый и цифровой). Тип двигателя является самым важным фактором при выборе драйвера. В униполярном или биполярном двигателе ток проходит только в одном направлении по обмотке. Биполярные шаговые двигатели имеют две обмотки через которые ток проходит поочередно. Шаговые двигатели с полным шагом приводятся в движение благодаря изменениям магнитного поля относительно ротора. Полушаговые двигатели в свою очередь действуют также, как двигатели с полным шагом однако угловое перемещение ротора составляет половину шага полношагового двигателя. На каждый второй шаг запитана лишь одна фаза, а в остальных случаях запитаны две. В результате угловое перемещение ротора составляет половину угла. Микрошаговые или минишаговые двигатели отличаются дискретным числом угловых перемещений угловых положений между каждым полным шагом. В драйверах минишаговых и микрошаговых двигателей используются электронные методы улучшения позиционного решения системы управления. Драйверы шаговых двигателей отличаются по электрическим характеристикам, параметрам управления, размерам и техническим характеристикам. Электрические характеристики включают в себя максимальное напряжение на входе, номинальную мощность, силу тока на выходе, максимальная сила тока на выходе, питание переменным и постоянным током. Драйверы для шаговых двигателей могут быть однофазными или трех фазными с частотой в 50, 60, или 400 Гц. Параметры управления включают в себя особенности установки и управления. В некоторых драйверах используются ручные средства управления типа кнопок, DIP-переключателей или потенциометров. В других используются джойстики, цифровые пульты управления, компьютерные интерфейсы, или слоты для карт PCMCIA (Международная ассоциация производителей карт памяти для персональных компьютеров). Программы контроля могут быть сохранены на передвижных, энергонезависимых носителях данных. Переносные блоки управления разработаны для управления с удаленных точек. Также доступно беспроводное и WEB управления. Форма драйверов позволяет сборку модуля в нескольких конфигурациях. Большинство устройств могут монтироваться на шасси, контактные DIN рельсы, панели, стойки, стены или печатные платы (PCB). Также возможна установка автономных устройств и интегральных микросхем, которые монтируются на печатные платы. Особенности драйверов: подавление резонанса; вспомогательные входы/выходы (I/O); мягкий старт; автонастройка, самодиагностика и проверка состояния; а так же сигнализация в таких случаях как перенапряжение. В драйверах используют много различных типов шин и коммуникационных систем. Шинные типы: (ATA), (PCI), (IDE), (ISA), (GPIB), (USB) и (VMEbus). Коммуникационные стандарты: ARCNET, AS-i, Beckhoff I/O, CANbus, CANopen, DeviceNet, Ethernet, (SCSI) и (SDS). Также доступно большое количество последовательных и параллельных интерфейсов. Соответствующая статья поможет подобрать драйвер биполярного двигателя для станка с ЧПУ.
Вопрос: Как узнать, подходит ли двигатель А к драйверу Б
Ответ: Чтобы это узнать, сделайте следующее: 1) проверьте, может ли драйвер выдавать ток фазы, равный(или примерно равный)току, указанному производителем двигателя. Если ток драйвера заметно меньше тока фазы двигателя - драйвер не подходит. 2) Вычислите максимальное напряжение питания двигателя по формуле Umax = 32 * sqrt (L), где L - индуктивность обмоток двигателя в миллигенри(указывается производителем). Желательно, чтобы максимально допустимое напряжение питания драйвера было примерно равно этому значению, или было немного больше. Если это условие не выполняется, то скорее всего двигатель вращаться будет, но больших скоростей достичь не удастся. Пример:подходит ли драйвер PLD545-G3 для двигателя PL86H151? Ток обмотки двигателя - 4.2 А, ток, выдаваемый драйвером - до 5А, первое условия выполнено. Индуктивность двигателя - 12 мГн, по формуле получаем Umax = 32 * sqrt(12) = 110 Вольт. Максимальное напряжение питания драйвера - 45 Вольт. Это означает, что двигатель будет отдавать момент только на низких оборотах, а для получения качественного движения необходимо использовать или драйвер с напряжением питания до 80 Вольт(например, PLD86 или PLD880), или двигатель с меньшей индуктивностью.
Вопрос: У меня перегревается двигатель, что делать?
Ответ: Для начала надо определить, действительно ли двигатель перегревается. Многие воспринимают рабочую температуру двигателя как перегрев, потому что её "не терпит рука", тогда как нагрев в 80 градусов - нормальное явления для шагового двигателя. Поэтому необходимо замерить реальную температуру. Если она меньше 80 градусов - беспокоиться не стоит. Если больше - первое, что необходимо проверить, это выставленный рабочий ток на драйвере. Он должен соответствовать номинальному току двигателя. Также можно использовать функцию снижения тока обмоток в режиме удержания. К снижению нагрева приводит также снижение питающего напряжения, однако, и момент тоже снизится. Если нет возможности жертвовать динамикой двигателя, остается единственный способ - установить на корпус ШД радиатор и/или вентилятор.
Вопрос: Шаговый двигатель постоянно пропускает шаги. Что делать?
Ответ: Пропуск шагов - самая неприятная проблема у шаговых приводов. Причин может быть множество. В порядке убывания распространенности:
В системе электропривода для станков с ЧПУ ключевую роль выполняют двигатели. Электрический двигатель – это преобразователь электрической энергии постоянного или переменного тока в механическую энергию . Во фрезерных станках с ЧПУ, режущих плоттерах, 3d принтерах, системах автоматизации и других устройствах они преобразуют сигналы с драйвера во вращательные движения собственного вала.
В машиностроении в большинстве случаев применяют шаговые, серво- и серво-шаговые двигатели. Принцип их действия схож, и многие драйверы могут работать со всеми типами. Основное отличие заключается в шаговом (дискретном) режиме работы шагового двигателя (n шагов на один оборот ротора) и плавности вращения серводвигателя. Серводвигатели требуют наличия в системе управления датчика обратной связи по скорости и/или положению, в качестве которого обычно используется инкрементальные или абсолютные энкодеры. Шаговые двигатели используются преимущественно в системах без обратных связей, требующих небольших ускорений при движении. Серво-шаговые двигатели сочетают в себе все преимущества шаговых и серводвигателей. Сегодня подробно разберем шаговый тип двигателей.
Шаговый двигатель
Это синхронный бесщёточный электродвигатель с несколькими обмотками, в котором ток, подаваемый в одну из обмоток статора, вызывает фиксацию ротора . Вал шагового электродвигателя не находится в постоянном вращении, а лишь поворачивается на определенный угол. Этим обеспечивается точное позиционирование рабочего элемента в пространстве. Электропитание такого двигателя дискретное, то есть осуществляются импульсами. Эти импульсы и поворачивают вал на определенный угол, каждый такой поворот называется шагом, отсюда и пошло название.
Устройство ШД
Конструктивно шаговые электродвигатели состоят из статора, на котором расположены обмотки возбуждения, и ротора, выполненного из магнито-мягкого или из магнито-твёрдого материала. Шаговые двигатели с магнитным ротором позволяют получать больший крутящий момент и обеспечивают фиксацию ротора при обесточенных обмотках.
Принцип действия
Конструктивные особенности шаговых двигателей могут отличаться в зависимости от типа мотора, но общий принцип действия почти неизменный. На статоре расположены четыре обмотки под прямым углом относительно друг друга. Как только на первую обмотку подается напряжение, ротор перемещается на 90 градусов. При поступлении напряжения на вторую, третью и четвертую обмотку вал продолжит вращение до прохождения полного круга. После чего цикл повторится снова. Если изменить очередность подачи импульсов в обмотки, направление вращения изменится.
Виды ШД по полярности и типу обмоток
В шаговых двигателях применяются биполярные и униполярные обмотки. Принцип работы был рассмотрен на базе биполярной машины. Такая конструкция предусматривает использование разных фаз для питания обмоток. Схема очень сложна и требует дорогостоящих и мощных плат управления.
Биполярные шаговые двигатели более мощные, крутящий момент у них на 40% больше, чем в униполярных. Униполярные электродвигатели гораздо более удобны в управлении.
Виды ШД по типу ротора
Выделяют следующие разновидности шагового двигателя:
- с постоянными магнитами (ротор из магнито-твёрдого материала). Чередующиеся полюса ротора имеют прямолинейную форму и расположены параллельно оси двигателя. Благодаря намагниченности ротора в таких двигателях обеспечивается больший магнитный поток и, как следствие, больший момент, чем у двигателей с переменным магнитным сопротивлением.
- реактивный (ротор из магнито-мягкого материала) имеет несколько полюсов на статоре и ротор зубчатой формы из магнито-мягкого материала. Намагниченность ротора отсутствует. Например, ротор имеет 4 зубца, а статор имеет 6 полюсов. Двигатель имеет 3 независимые обмотки, каждая из которых намотана на двух противоположных полюсах статора. Такой двигатель имеет шаг 30 градусов.
- Гибридные двигатели сочетают в себе лучшие черты шаговых двигателей с переменным магнитным сопротивлением и двигателей с постоянными магнитами. Ротор гибридного двигателя имеет зубцы, расположенные в осевом направлении. Гибридные шаговые двигатели обеспечивают меньшую величину шага, больший момент и большую скорость. Типичное число шагов на оборот для гибридных двигателей составляет от 100 до 400 (угол шага 3.6 – 0.9 градусов.).
В машиностроении наибольшее распространение получили высокомоментные двухфазные гибридные шаговые электродвигатели с угловым перемещением 1,8 или даже 0,9 градусов на шаг. Если контроллер позволяет, то возможно использование полушагового режима или режима с более мелким дроблением шага (микрошаговый режим), при этом на обмотки подаются дробные значения напряжений, зачастую формируемые при помощи широтно-импульсной модуляции. Точность выставления шага определяется качеством механической обработки ротора и статора электродвигателя.
Управление ШД
Управление шаговыми двигателями может производится одним из следующих методов:
Волновой . В данном методе напряжение подается только на одну катушку, к которой и притягивается ротор. Так как задействована только одна обмотка, то крутящий момент ротора небольшой, и не подходит для передачи больших мощностей.
Полношаговый . В данном варианте возбуждаются сразу две обмотки, благодаря чему обеспечивается максимальный момент.
Полушаговый . Объединяет первые два метода. В данном варианте напряжение подается сначала на одну из обмоток, а затем на две. Таким образом реализуется большее количество шагов, и максимальная удерживающая сила, которая останавливает ротор при больших скоростях.
Микрошаговое регулирование производится подачей микроступенчатых импульсов. Такой метод обеспечивает плавное вращение ротора и снижает рывки при работе.


Часовой пояс: UTC + 3 часа
Станок ЧПУ, шаговые двигатели и все остальные вопросы.
Пытаюсь сделать станок с ЧПУ. Сделал одну ось. Шаговый вынул из принтера PM35L048. Почему очень сильно греюца обмотки буквально через несколько минут работы? И это при том что питаю его от 12 вольт, хотя он и на 24 может работать. Если использовать например такой контроллер шагового двигателя нагрев обмотог уменьшицо?
И какое у движка максимальное количество оборотов в минуту? А то что-то он медленно крутица, а попробовал сделать быстрее - вообще останавливаеца и дергаеца на месте. Засада в том, что использовал шестеренки какие были, а там передатчное число видать очень большое. Каретка вообще на глаз не движеца. Буквально миллиметр в несколько минут получилось
Инфы по сути вопроса практически Вы не дали.
Механика оси, контроллер двигла, электр. параметры и пр.
Почитайте форумы CNC-шников, и на этом форуме перетиралось ЧПУ, сформулируйте вопросы конкретней.
Я так это понимаю.
_________________
Информация должна принадлежать людям бесплатно!
JLCPCB, всего $2 за прототип печатной платы! Цвет - любой!
Залил видео на трубу. Контроллера пока никакого нет, поэтому и спрашиваю - тот что в первом посту подойдет, чтоб сильно не грелся мотор?
Сборка печатных плат от $30 + БЕСПЛАТНАЯ доставка по всему миру + трафарет
Так, кое-что ясно.
Теперь так: сейчас электрически чем управляется шаговик?
12 В источник - это понятно.
Чем формируешь управляющую последовательность импульсов?
PS.Зачем червяк и шестерня? Скорость тут теряешь катастрофически
У тебя же потом все равно ходовой винт и, судя по видео, нормальная гайка на нем
Какие усилия для этой оси предполагаются?
_________________
Информация должна принадлежать людям бесплатно!
Приглашаем 27/01/2022 всех желающих посетить вебинар, посвященный двум наиболее растущим сегментам интегрированных источников питания – AC/DC малой мощности (1-20Вт) и сегменту решений PoL без изоляции. На вебинаре рассмотрим проблему выбора AC/DC в бюджетном сегменте и концепцию тестирования ускоренного старения, проведем сравнительный анализ подходов к интеграции AC/DC модулей. Сделаем обзор решений концепции POL с доисторических времен до современных технологий и средств для разработки и тестирования.
Шаговик управляется по LPT. Схема исключительно для теста. Рисовалась в уме (моём) Последовательность такая - 74245 буфер на всякий случай -> 74174 (ТМ9) защелка -> ключи на мосфетах. Биты 0-3 LPT управляют ключами, бит 4 идет на С вход 174-й (защелкивает данные для ключей). На компе самописная прога на дельфях, реализующая режим шага. Просто для теста быстрее было самому все сделать, чем искать и разбирацо в чужих шнягах. Надо было убедицо что работает, а щаз ищу окончательный готовый вариант step/dir контроллера.
Я же не на заводе делаю, а дома на коленке. Из инструментов только сверло и напильник. По-этому беру что есть. Что поделаешь, если в принтере была только такая передача. Других у меня нет. А посадить жестко вал двигателя на ходовой винт нельзя, все ж кривое что пистец, клинит сразу. А через шестеренку оно как-то сглаживаеца и работает очень даже хорошо.
Компания Mornsun выпустила три серии источников питания с креплением на DIN-рейку в форм-факторе Home Automation на популярные значения выходной мощности 30, 60 и 100 Вт (серии LI30-20/PR2, LI60-20/PR2, LI100-20/PR2). Эти источники питания относятся ко второму поколению продукции (R2) и характеризуются высокой надежностью и хорошей стоимостью.
Дурдом! Нашел оправдание = руки кривые. Вал шагового двигателя должен напрямую крутить вал ходового винта. Мотор греется - а может у тебя одна обмотка вперед тянет, а другая обратно? Проверь картину импульсов на двигатель.
_________________
Информация должна принадлежать людям бесплатно!

2 Brigadir
У коллеги ШД высокоомный низкомоментный (24В-12Ом), там свои "хитрости" управления, высокая индуктивность обмоток не дает возможность нароститьть частоту вращения вала без специальных ухищрений.Потому он и греется, а как только он его вяжет прямо (жестко ) на ось привода, все косяки вылазят наружу.
Как с этим бороться - известно, и если ТС тему не забросит - поборем!
С рождеством всех!
_________________
Информация должна принадлежать людям бесплатно!
2 MyxoMop
Если то, что на видео, это не ось Z, меняй движок на более мощный.
Двиг этот на X и Y не прокатит
Для испонения "на коленке" - если судить по видео - очень неплохо, зачет!
Проверял ли на клины по всей длине хода?
Я для машины 1700*1200 помнится семь раз переделывал точку крепления ШД
Все у тебя выйдет, судя по испонению механики.
_________________
Информация должна принадлежать людям бесплатно!
Я тоже видио глянул. Обьясню: один оборот ходового вала = примерно 1мм (может быть и другая величина, всё зависит от шага резьбы); червячная передача - 1 оборот мотора = 1 зуб большой шестерни. А сколько на ней зубов? Вот поэтому скорость каретки необычайно низкая. Поэтому надо делать прямое соединение вала двигателя на ходовой винт(разумеется через гибкую муфту). Потому как сам шаговый двигатель является редуктором(некоторые модели могут делать аж 200 шагов), да и сам винт(ходовой) тоже редуктор (примерно 1мм на 1 оборот). Ну а тяговое усилие = шаговый мотор достаточной мощности. Всё надо просчитывать и применять мотор согласно расчетом и с запасом по мощности(N х 2 хотя бы).
Изготовление привода(позвольте опыт передать, может и пригодиться): ходовой винт желательно сажать на подшипники с обеих сторон(а не на один, как обычно делают, используя в качестве второй опоры подшипники шагового двигателя). А потом через муфту подсоединить шаговый мотор, который легче установить соосно валу. Но лучший метод: передача вращения от шагового на вал короткой зубчатой передачей 1/1 или зубчатым ремнем. Несущие боковые стойки подшипников вала сверлить в пакете(зажать в струбцине и все отверстия сверлить на сверлильном станке, строго по вертикали = гарантия точного дублирования деталей). Пока всё, а то много болтаю. Удачи и с праздником!.
Да, это ось Y. Но более мощных движков нету - заменить не на что. Есть только еще один мощнее - PM55L048 - но я его припас для оси X. Просто многие пишут, что используют ШД от дисководов, а там же еще слабее. И ничо, работаеть. Кстати я попробовал удержать его рукой - на вид довольно сильно крутит.
Именно так у меня и сделано. Но все равно получилось очень криво. Ходовой винт (хотя это очень громко сказано - на самом деле это просто шпилька с резьбой, купленная за копейки в строительном магазине) - ходит не только по своей оси, но еще и описывает как бы круг. И плюс к тому же однозначно не будет соосности вала и винта (получицо не так --, а как то вот так / \). Пока подгонял подшипники - видать в них забились опилки и они крутяца уже не так плавно.
Да при сборке вообще пистец - вроде очень аккуратно разметил дырки, накернил. Сверлю - пилять, расхождение на 1-2 мм Да, кстати, вот эту одну ось я делал почти год (где-то с апреля уже того года)
Но щаз меня механика не так волнует. У меня главный вопрос - как побороть нагрев двигателя. Ведь в принтере он наверно не так грелся.
Насчет резьбовых базарно-магазинных шпилек:
Резьбу на них делают накаткой (на гайках тоже ) - как следствие она всегда "гуляет".
Но за счет этого "гуляния" можно выставить подшипники довольно точно.
626 ZZ подш. на шпильке М8 , с 2-х сторон по шайбе и по гайке М8. - выставляются минут за 10-20.
Насчет нагрева двигателя.
Надо осциллом посмотреть импульсный ток в каждой обмотке на нескольких частотах, напр. 200, 400, 600 Гц и сравнить его с красным графиком даташит на двиг.
Вообще шаговики в станках у людей греются практически всегда - но в разумных пределах , гр 50 -60 бывает.
_________________
Информация должна принадлежать людям бесплатно!
Практически все контроллеры ШД - в принтерах и еще где-не-попадя делают ШИМ-регулировку импульсного тока обмоток.
Более того - многие контроллеры реализуют режим снижения тока в режиме "удержания" - т.е. когда двиг стоит .
И без ШИМа больших скоростей ШД под нагрузкой не получить.
Без контроллера можно понижать напр. питания ключей, пока нагрев не стабилизируется, допустим гр. на 40-50, но тогда не взять всю мощность двига.
_________________
Информация должна принадлежать людям бесплатно!
Вообще шаговики в станках у людей греются практически всегда - но в разумных пределах , гр 50 -60 бывает.
_________________
Информация должна принадлежать людям бесплатно!
Не, не, не. У меня самый настоящий униполярник. Там в даташите просто оба сразу указаны, они типа и такие и такие делают, ты наверно не на тот моторчег глянул.
Еслиб ты только знал как не хочецо этого делать , как правило все ветки про CNC имеют гигантский размер, а времени абсолютно нет.
_________________
Информация должна принадлежать людям бесплатно!
5 Обижаешь, я ж сам и схему делал и прогу.
Ясненько, 2 общих соединены в двиге и выведены наружу одним концом
Тогда можно пробовать тот контроллер, из 1 поста.
Загляни на их форум, стопудово девайс обсуждался.
Кстати, имтересно, как он пойдет, у самого до МК руки не доходят по этой жизни, хотя за клавой уж лет 30-ть
Вопрос: у тебя "плюс" напрямую на обмотки (через ключи) или через форсирующие резисторы?
_________________
Информация должна принадлежать людям бесплатно!
Ага, напрямую. В принципе "схема" ключей взята из того контроллера. Только не ставил токовые резисторы и в gate резисторы не 15 Ом а 33. Кстати полевики вообще не греются, полностью холодные.
Часовой пояс: UTC + 3 часа
Кто сейчас на форуме
Сейчас этот форум просматривают: Volodya_Tver и гости: 116
Powered by phpBB © 2000, 2002, 2005, 2007 phpBB Group
Русская поддержка phpBB
Extended by Karma MOD © 2007—2012 m157y
Extended by Topic Tags MOD © 2012 m157y
Продолжаем разбираться с ЧПУ станком. Настройку прошивки GRBL рассмотрели тут: Прошивка grbl 1.1, настройка - инструкция на русском. Но где же взять параметры для настройки ЧПУ станка? Сегодня в статье рассмотрим, как можно рассчитать винтовую и ременную передачу ЧПУ станка. Но расчет не всегда дает 100% результат. Для проверки и корректировки неточности используется калибровка ЧПУ станка. Как это сделать на практике я уже рассказывал в проекте:ЧПУ плоттер на Arduino своими руками.
При расчете нужно учитывать один немало важный параметр, который мы еще не рассматривали подробно – это Микрошаг.

Что такое микрошаг и как настраивать микрошаг шагового двигателя.
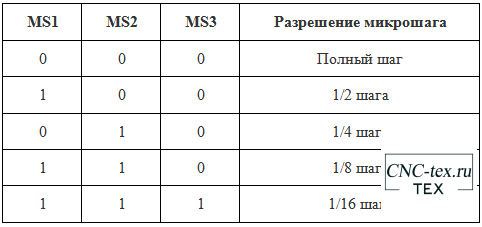
Основной параметр шаговых двигателей (ШД) это количество шагов на 1 оборот. Самое распространённое значение для ШД – 200 шагов на оборот (или 1,8 градуса на шаг). Мы будем использовать это разрешение во всех сегодняшних примерах. Более точную информацию можно узнать в описании к вашему шаговому двигателю. Зачастую 200 шагов на оборот, могут быть недостаточными для достижения необходимой точности. С целью повышения точности можно изменить передаточное число механически (использовать редуктор), а можно включить микрошаг – режим деления шага шагового двигателя, это увеличит число шагов на оборот, с коэффициентом 2n (n — целое число). Драйвер A4988 поддерживает деление шага: 1, 1/2, 1/4, 1/8, 1/16. Подробнее о драйвере A4988 читайте тут: Драйвер шагового двигателя A4988. Драйвер DRV8825 поддерживает деление шага: 1; 1/2; 1/4; 1/8; 1/16; 1/32. Подробнее о драйвере DRV8825 читайте тут: Драйвер шагового двигателя DRV8825.
Давайте рассмотрим пример. Если мы выставим микрошаг 16, что является в 16 раз больше полного шага и в нашем примере даст 3200 (200х16) шагов на оборот. На первый взгляд это отличный результат и почему бы не использовать максимальное деление шага во всех станках. Но тут есть и минус – это падение крутящего момента при увеличении деления шага. Подробнее Микрошаг рассмотрим в следующей статье.
Расчёт винтовой передачи ЧПУ станка.
Винтовая передача ЧПУ, либо ее более продвинутый вариант шарико-винтовая передача (ШВП), являются наиболее часто используемым вариантом перевода вращательного движения вала шагового двигателя в линейное перемещение исполнительного механизма.
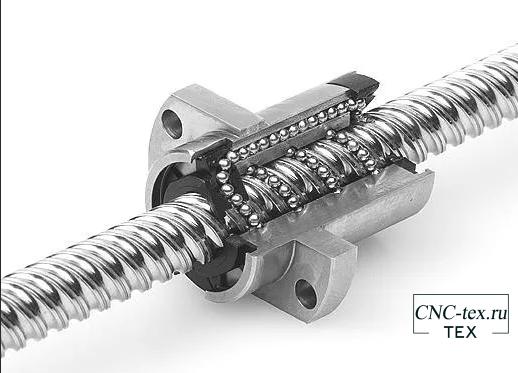
Для расчёта разрешения нам необходимо знать ШАГ винта, либо шаг винта ШВП. В описании трапецеидальных винтов обычно пишут Tr8x8,Tr10x2, первая цифра говорит нам о диаметре винта, вторая как раз о его шаге в мм. Винты ШВП обычно обозначаются 1204, 1605 и т.п. Первые 2 цифры – это диаметр винта, вторые две – это шаг в мм. В 3d-принтерах обычно используют винт Tr8x8, диаметром 8 мм и с шагом 8 мм. Обзор моего 3d-принтера можно посмотреть тут:Обзор 3D принтера Anet A8. Сборка. Наладка.

Формула расчета винтовой передачи ЧПУ получается следующей, в числителе – количество шагов на оборот, в знаменателе – перемещение за оборот.
Тп = Sшд*Fшд/Pр
- Тп - точность перемещения, шаг/мм
- Sшд — количество шагов на оборот для двигателя (в наших примерах 200)
- Fшд — микрошаг (1, 2, 4, 8 и т. д.)
- Pр — шаг винта (например, 8 мм)
Рассчитаем пример со следующими параметрами, двигатель 200 шагов на оборот, с 4-кратным микрошагом, с трапецеидальным винтом Tr8x8 даст нам 100 шагов на мм.
Другими словами, для того чтобы ЧПУ станок переместился на 1 мм, нам нужно сделать 100 шагов двигателя. Что является неплохой точностью.
Расчетные значения нужно указать в прошивке GRBL:
Расчет ременной передачи ЧПУ станка.
Во многих ЧПУ станках используются ремни и шкивы. Ремни и шкивы бывают разных форм и размеров, но одним из распространённых стандартов является GT2.

Следующие уравнение применимо для цепных и ременных передач, если вы введете правильный шаг. Обратите внимание, что эти уравнения не учитывают люфт.
Вот простое уравнение, которое вы можете использовать для расчета шагов на мм для линейного движения с ремнями и шкивами.
Тлп = Sшд*Fшд/Pр*Nшк
- Тлп - точность линейного перемещения, шаг/мм
- Sшд — количество шагов на оборот для двигателя (в наших примерах 200)
- Fшд — микрошаг (1, 2, 4, 8 и т. д.)
- Pр — шаг ремня (например, 2 мм)
- Nшк — количество зубьев на шкиве, на валу двигателя.
Попробуем посчитать для примера с такими параметрами, двигатель 200 шагов на оборот, с 2-кратным микрошагом, 2-миллиметровыми ремнями GT2 и шкивом с 20 зубцами даст нам 10 шагов на мм.
200*2/2*20=10 шагов/мм.
Данный пример подойдет для расчета перемещения 3d-принтера. ЧПУ станков на ремнях: лазерный гравировальный, плоттер и пр.
Расчетные значения нужно указать в прошивке GRBL:
Калибровка ЧПУ станка.
Тк = Тп * Kп / Kф
- Тк – калибровочное значение, шаг/мм.
- Тп - точность перемещения, шаг/мм (из примера 100 шаг/мм)
- Kп — заданное значение для перемещения (в моем случае 100 мм.)
- Kф — фактически, на какое расстояние переместилась ось (допустим на 99 мм.)
Для примера проведем расчёт винтовой придачи, которую рассчитывали выше и выяснили, что нужно совершить 100 шагов для перемещения на 1 мм. Также допустим, что мы отправили команду на перемещение станка на 100 мм, а по факту он переместился на 99 мм. Произведём расчет:
100*100/99=101,01 шагов/мм.
Указываем данное значение в прошивке GRBL и проводим калибровку еще раз. Если ЧПУ станок перемещается на заданное значение, можно пользоваться станком. Иначе проводим повторную калибровку.
Понравился статья Расчет и настройка ремённой и винтовой придачи ЧПУ станка. Калибровка ! Не забудь поделиться с друзьями в соц. сетях.
А также подписаться на наш канал на YouTube, вступить в группу Вконтакте, в группу на Facebook.
Читайте также: