
Драйвер для двигателя жесткого диска своими руками
Обновлено: 04.07.2024
Всем привет! В статье попытаюсь разъяснить основные способы управления двигателем HDD и сходными с ним электрическими машинами.
Введение
Двигатель жёсткого диска согласно отечественной теории электрических машин классифицируется как синхронная машина с возбуждением от постоянных магнитов. В западной терминологии PMSM (англ. Permanent Magnet Synchronous Motor). Как видите, это не шаговый двигатель, коим его некоторые по ошибке считают. Также встречается название Бесколлекторной Машины Постоянного Тока (англ. BLDC – Brushless Direct Current motor). В науке электропривода считается, что корректней называть это устройство Вентильным Двигателем. Однако следует помнить, что это не сама машина, а машина + инвертор напряжения + обратная связь с датчика положения ротора. В результате имеем некий объект, который питается постоянным током и имеет механические характеристики сходные с двигателем постоянного тока.
Обмотки двигателя соединены в звезду. От нулевой точки обычно выведен проводник, в некоторых случаях это упрощает управление. Сопротивление фазы ~1 ом.
Алгоритмы управления
1 способ.

Простой перебор фаз. Необходимо 3 силовых ключа, которые подключают фазы к источнику в порядке АВ-ВС-СА. Такой способ чаще всего встречается в интернете у самодельщиков.
Достоинства :
— простота;
— малое кол-во силовых ключей (3 шт);
— простота организации о\с по противоЭДС;
— меньший вес\габариты, что важно в rc моделизме.
Недостатки:
— большой ток через ключи;
— электромагнитный момент пульсирует и далёк от идеала (насыщен высшими гармониками). В итоге – стабильность работы без о\с низкая. В максимальной скорости также проигрывает другим способам управления.
На рис. ниже — фазные напряжения.
2 способ.

Перебор фаз с формированием 6-ти базовых векторов. Наткнулся на него в апноуте ST microelectronics [1]. Является улучшением 1-го способа (или ухудшением 3-его). Преимущества и недостатки смешаны. Рассматривать не будем, т.к. не понимаю почему имея 6 ключей не использовать способ, приведенный ниже О_о
3 способ.
Формирование 6-ти базовых векторов. Необходимо 6 ключей. В каждый момент времени работает 3 из них. Всего существует 8 положений этих ключей, 6 векторов (формируют синусоиды) + 2 нулевых вектора (открыты все ключи верхнего или нижнего плеча). Нулевые векторы нужны для более продвинутых систем с ШИМ.
Достоинства :
— простота;
— форма напряжения питания более приближена к синусоиде;
— как следствие предыдущего вывода – меньший нагрев;
— более стабилен в работе без о\с;
Недостатки :
— поле машины всётаки не круговое, как должно быть;
— ток машины немного выше чем в идеальном случае.
Фазные напряжения ниже.
4 способ.
Промышленный стандарт – добавляем к предыдущему способу №3 ШИМ модуляцию между базовыми векторами, для того чтобы получить любой вектор окружности вместо 6ти.
Достоинства :
— здесь всё практически идеально. Ток минимален, магнитное поле круговое. Момент при этом не пульсирует
Недостатки :
— Для организации полноценного привода с ШИМ 6ти векторов и о\с по положению необходим DS процессор.

Так выглядит ШИМ модуляция некоего привода ТРИОЛ АТ [2].
5способ.

Векторное управление. В силу своей сложности рассматривать не будем.
В данном случае популярный на западе Field Oriented Control — контроль по полю, конкуренцию которому позже составил DTC — Direct torque control (прямое управление моментом). Остальные способы векторного управления (по вектору потокосцепления статора, ротора. ) в промышленности я не встречал
Обратная связь по положению.
Необходимо сказать, что привод с датчиковым управлением всегда более предпочтителен чем привод с управлением без датчиков. Это касается и векторного управления асинхронными машинами и систем управления двигателем постоянного тока. Однако все пром производители стремятся исключить датчики, как лишний механический элемент.
Принцип используемой связи по противоЭДС: нам необходимо поймать момент когда полюс магнита проходит через фазу. Упрощённо это значит что ротор машины прошёл ровно половину пути и нам необходимо скорректировать (задержать) включение ключей на соответствующее время. К примеру: в способе №1 это время равно половине времени на включение ключей. В 3ем – оно равно времени работы одного базового вектора.
Технические аспекты.
Используя способ №1 необходимо на один вход компаратора подать половину питающего напряжения инвертора. На второй вход завести фазу и ловить момент когда выход компаратора изменится. Это опять же пром стандарт, который используется и в 4ом способе управления как одна из составляющих ШИМ. Кому интересны другие способы — прошу пройти по ссылке
На этом всё. В следующей статье расскажу о попытках реализовать разные способы управления и поделюсь схемами и исходниками к готовому устройству
ps Моя первая статья здесь, прошу сильно не критиковать
Комментарии ( 98 )
Спасибо, действительно нужная статья! Тема двигателей из HDD и правда как-то размыта, так что попытка внести в это ясность достойна всяческого одобрения. Жду продолжения.
Весьма неплохо. Перенс в коллективный блог. Если будете продолжать, то вам надо в него тоже вступить (иначе статья перекидываться будет обратно в личный блог после редактирования любого)
Так ли он необходим? А что мешает сделать систему трех шимованых синусов в виде обычной таблицы, скажем с точностью до градуса. Тогда мы получим небольшой (360*3) расход памяти и бешеную скорость формирования этого самого тройного синуса.
Осталось только отслежить положение двигателя. Тут либо датчики Холла, либо какие другие ухищрения. И получаем в результате ОС.
Тут ШИМ из векторов — к примеру 1ый и 2ой вектор — первое положение(ключи 1,2,6) второе — ключи (1,5,6) — их модулируем. Потом переходим к следующему сектору, 2-3 векторы. + туда добавляем нулевые вектора (1,3,5) и (2,4,6) и для обработки о\с, кнопок БЫСТРЕЕ, МЕДЛЕННЕЕ и тд времени нет с единственным условием. Мы пытаемся раскрутить его на максимальные обороты с частотой синусоиды 300-500 Гц и дальше ;)
если брать привод как в промышленности 0-50 Гц, то вполне может хватить и ресурса mega.
Но если у нас есть система напряжений А B C генерируемая ШИМами по таблице, то что нам мешает перебирать эту таблицу с любой скоростью (хватило бы частоты ШИМ'a) с этим справится почти любой МК.
теперь понял что вы предлагаете. Но мне трудно представить как это возможно реализовать. У нас есть 6 ключей, с их помощью мы формируем сразу 3 синусоиды. А как в вашем случае?
Ну, во первых, для современных Мег 6 аппаратных шим генераторов в порядке вещей. А для STM32 так и все 12 не проблема. Так что создать таблицу с шимами это совсем просто.
Во-вторых, нам не нужно 6 шим сигналов. достаточно только трех. Ведь у нас не просто 6 ключей, а 3-полумоста, по одному на фазу. Т.е. каждую пару ключей (верхнюю-нижнюю) можно дрыгать одним шимом, главное соблюдать dead time. Тут автомотив версии контроллеров нам в помощь. У них это аппаратно. По шиму на каждую фазу (полумост) со сдвигом на 120 градусов и вот мы получаем трехфазную систему напряжений, соотношение напряжения фаз дает нам вектор. Ну и гоняя по таблице мы можем выбрать любое значение ШИМ с точностью хоть до долей градуса, главное рассчитать таблицу правильно.
Тут правда один минус все же есть. Приходится дрыгать сразу два ключа в верхнем и нижнем плече, что несколько увеличивает потери.
Замечу, что нам нужно всего лишь четверть волны держать в таблице, остальное можно получить из нее же.
Я как-то давно генерил 3 синусоиды на обычном at90s8535. для управления движком пользовал полумостовые драйвера от IR. Работало. Причем смещение между фазами можно было регулировать с нужным шагом, равно как и частоту синусоидального сигнала.
Хорошо, но уж слишком лаконично.
А какой способ управления используют родные контроллеры от этих моторов?
Заинтересовало, какую мощность и момент может развить движок от винта? Если конкретно: смогут ли 4 мотора, подключенный напрямую к колесам, диаметром 12см, разогнать до приличной скорости робота (из нагрузки — лишь двигатели и батарея питания)?
Смотря как и каким проводом перемотать. Сделав одновитковую обмотку из медяхи наверное можено и пол киловатта выжать. Если железо конечно выдержит.
да лаадно! вон на марсоходе машинка на двух движках более-менее нормально бегает, так там примитивный контроллер. а если сделать нормальный регуль, так вообще замечательно будет.
Для этого больше подойдут движки от цдрома, они помощнее, датчик положения есть (даже три), и подшипник не такой нежный, как у движка от хдд. Их, кстати, авиамоделисты перематывают и на модели ставят.
А! Это просто невероятно! Совпадение. Я уже неделю мучаю такой двигатель разными формами питающего напряжения. Дошёл до того что сейчас пытаюсь применить микросхему снятую с платы винчестера.
Смотрел раньше апноуты Атмел. Пересмотрел их сейчас — на простых контролерах типа tiny и mega предлагают вращать либо по 1му способу (перебор фаз)добавляя туда ШИМ либо используют датчики холла, либо применяют дополнительные схемные решения.
Может я что-то упустил, но мне на глаза не попалось бюджетное устройство, которое бы формировало ШИМ синусоиды с частотой 500 и больше Гц из 6ти базовых векторов без датчика положения и дополнительных схемных решений
Что Вы понимаете под дополнительными схемными решениями? Внешние компараторы?
Микрочип кстати в этом преуспел, согласен!
мне понравились ихние апноуты по FOC, очень хорошо расписаны

Это один из них?
Такое случается на униполярнике? Я почему-то думал, что у обмоток должны быть одинаковые сопротивления.
На крепёжном диске двигателя видна ещё какая-то микросхема, может это схема управления и для неё нужен специальный интерфейс?
Это двухфазный двигатель, а микросхема — датчик Холла для контроля положения ротора.
Такие же движки стоят в флоповодах.
Dzhus! У меня такой же, сам заинтересован в том как его подключить. Выдрал таки из винта на 20 мегов)) а знакомый сказал, что раритет загубил)
Да, ST-225 это раритет. Видели бы ценители, какими ящиками их на помойку институты списывают. Я как увидел это, сразу себе шаговики полутал.
Есть еще самый простой и понятный способ — фозосдвигающая цепь и 1-но фазный ШИМ.
Бред от ST короче.
Какой-то нанятый обкуренный индус с изучением объектного кода развлекался без понимания сути и практики в предмете.
В авиамоделях используют 6 ключей… маломощные на N и P мосфетах с прямым управлением от МК для нижних и через транзюк+резюк — для верхних
потом китайци до этого же контроллера прикручивают ir2103 и получаем уже 6 одинаковых полевиков вверху внизу + дедтайм + защиты от одновременного открытия сквозняка
НО у них всех используется 2 способ а перемещение магнитой ловят смещением фазы реальной и фазы — суммы напруг на концах АВС — просто резисторами — заводят на компаратор или АЦП и вуаля
самый простой на 20-30 ампер контроллер стоит 6-8 баксов
смысла играться с такими вещами не вижу
далее
перематывать ХДД моторчики не советую
там очень слабый магнит
есть маленькая проблемка
когда полюс вентиля одной из обмоток перенасыщяется (намагничивается) больше чем магнит который к нему аналогичным полусом повёрнут — то вместо отталкиваться — магнит к нему притягивается — это называется срыв… потому что соседние катушки сами себе генерируют землю и получается что контроллер уходит в килогерцовые частоты думая что ротор за ним успевает а в реальности он стоит и гудит… свистит… ну и через 2-3 секунды обмотки обгорают так как КЗ
я пробывал перематывать и сидюковые моторки и моторки от хдд 5.25" — фигня полная…
от ХДД кстати в родном исполнении и 24 вольтах питания можно раскрутить до 1600 оборотов и при этом иметь крутящий момент очень серьёзный… но… нужно следить ибо если оставить на максимуме модуляцию(типа газ — заполнение ШИМом верхних ключей которые в данный момент по таблице должны быть открыты) — возможен срыв ибо магнитики в ХДД очень никакие… вот когда их заменил неодимовыми шариками… уууу… отогда крутяк… можно мини болгарку сделать или ещё что — по крайней мере рукой остановить за шпиндель выходной под диск — не мог рука горит…
я же сейчас мучаю СТМVLdiscovery чтоб заставить его красиво и без глюков выдавать ШИМом высокочастотным красивые синусоиды размах которых будет контроллировать ручка газа и ток через обмотки
делаю электромопед
без контроля тока я уже катался… мотор у меня 2500 ватт
100 ампер 24 вольта
взял обычный авиамодельный хороший контроллер с драйверами и четкими таймингами — не упрощенный китайский вариант
усилил выходную часть IRF3205
посеребренные провода 2800 жильные специальные… золотые разьёмы выдерживающие 250 ампер запросто…
аккумулятор с номинальной токоотдачей 200 ампер…
короче без контроля тока прокатался я до первой выбоины когда ручка газа дрогнула…
мотора — это 8 витков проволки 10мм квадратных… тоесть полное КЗ… если б не магниты — один раз отвертку туда заосало — ели отодрал… короче бахнуло так что у всех транзисторов и драйверов посрывало крыши в прямом смысле слова…
но всётаки он ехал… и очень непривычно…
теперь вот хочу сделать свой умный и быстрый контроллер…

Спустя 40 с лишним дней мне наконец-то прислали драйвер. За это время я успел найти пару моторчиков от жёстких дисков, и сейчас расскажу как же запустить его. В комплекте к моему драйверу шел "сервотестер", правда на корпусе написано "сервер тестер".
Это устройство генерирует шим сигнал, необходимый для управления драйвером. Имеет три режима:
1)ручной
2) половина газа
3)периодично повышать и понижать обороты.
Цена всего этого комплекта 300 рублей.
На вход подаем 12 вольт, на выходе имеем 3 провода, которые подключаем к двигателю.


Итак, берем мотор, паяем к нему три провода, учтите, что мотор хорошо крутится только против часовой стрелки, это обусловлено строением системы подшипников.

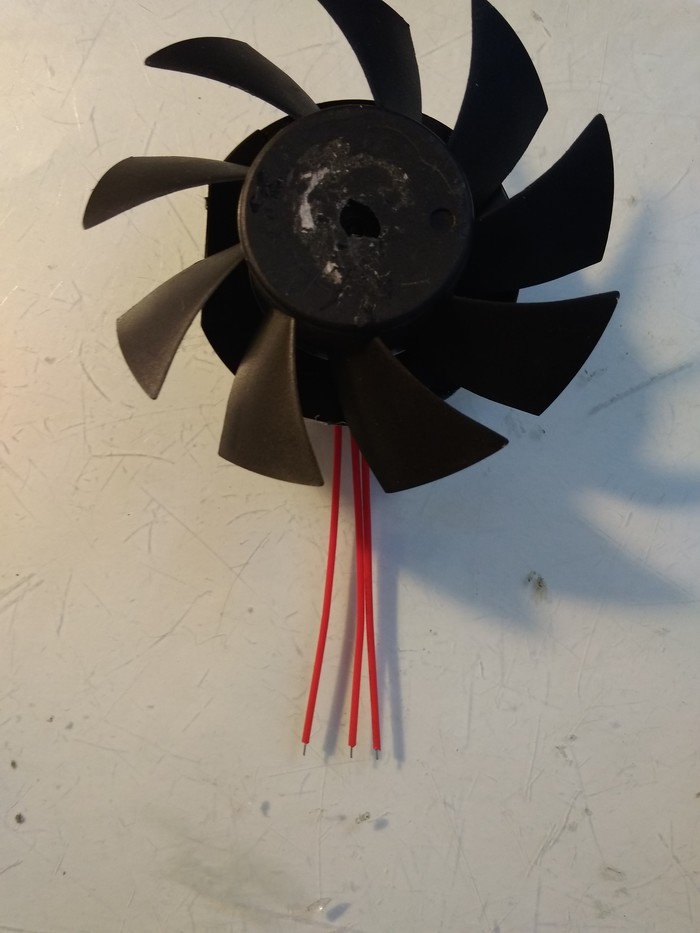
В позапозапрошлом посте я писал, для того чтобы изменить направление вращения BDLC мотора достаточно поменять местами два провода идущие к обмоткам.
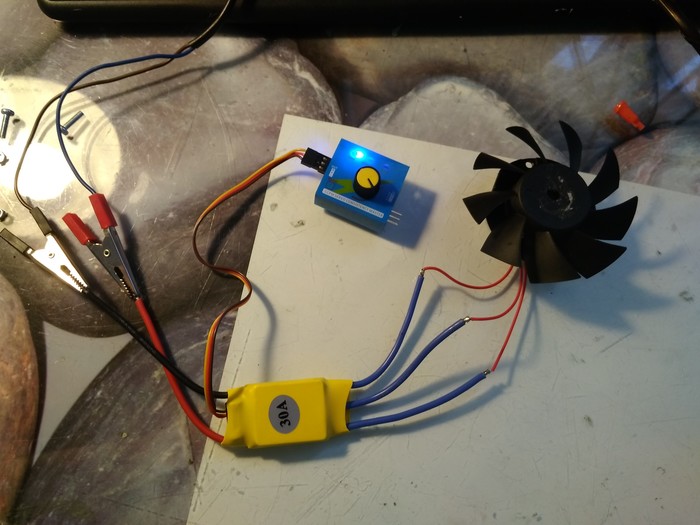
Схема готова, подаем питание 11-12 вольт и смотрим:)
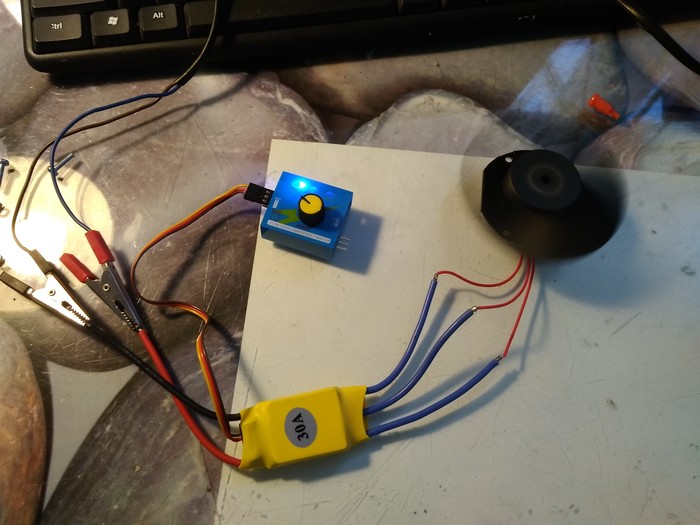
Мотор запускается, вы имеете возможность регулировать обороты) Токопотребление в районе 1 ампера.

Таким образом вы можете запустить любой мотор от hdd или dvd прикрепить наждачный круг и пользоваться наждаком.
Всем спасибо, хорошего дня:)
Супер, ставим пропеллер на мотор ДВД, раскручиваем на 26000 оборотов и получаем пулемет, стрелявший лопостями!
А как же ссылка на устройство?)
А к вот такому движку от диска куда цеплять?
а если использовать в квадракоптерах получиться?
Как устроен жёсткий диск и принцип работы HDD и SSHD
Жёсткий диск может хранить в себе большое количество данных, но знаете ли вы как он устроен внутри или принцип его работы?
Так вот я вам наглядно покажу. HDD состоит из двух частей. Корпус, чёрного цвета и прикрытый крышкой, это гермоблок. Плата на обратной стороне, это контроллер. О нём я расскажу чуть позже. А сейчас посмотрим что внутри гермоблока.

Открыв крышку, сразу бросается в глаза большая блестящая пластина, занимающая большую часть корпуса и зажатая шайбой. Это и есть сам жесткий диск, их кстати может быть несколько расположенных один над другим.

Пластины крепятся на шпиндель электромотора, который заставляют их вращаться со скоростью 7200 об/мин, а контроллер поддерживает постоянную скорость вращения при помощи контактов на обратной стороне корпуса, через них же и осуществляется питание. Именно на пластинах хранятся все данные, причём не только пользовательские, но и служебные необходимые самому устройству.

Чем больше пластин, тем больше информации может вместить устройство, а выполнены они обычно из металлических сплавов (хотя были попытки делать их из пластика и даже стекла, но они были не долговечны, встречаются даже керамические диски).
Покрыты пластины ферромагнитным слоем, который и хранит всю информацию. Этот слой разбивается на сотни тысяч узких дорожек, каждая из дорожек разделена на секторы это позволяет определять, куда записывать и где считывать информацию. А вся карта о секторах и дорожках находится в памяти контроллера.

Ну а чтобы записать данные, над диском с большой скоростью движется металлический кронштейн, который называется коромысло, на его конце находятся слайдеры с магнитными головками.


Вся эта конструкция приводится в движение при помощи привода основанном на электромагнетизме. Который называется сервопривод. Вот он позиционирует коромысло в то место, куда нужно записать или откуда считать информацию и управляется интегральной микросхемой. Внутри он состоит из двух мощных неодимовых магнитов, катушки и фиксатора. Фиксатор предотвращает какие-либо движения головок в отключенном состоянии и пока шпиндель не наберёт обороты. Всё это важно, потому что от этой конструкции зависит долговечность головок, а от скорости и точности перемещения коромысла зависит время поиска данных на поверхности пластин. Интересно ещё то что головка коромысла обычно не соприкасается с дисками, а парит над ними при помощи восходящих воздушных потоков на расстоянии примерно 10 нм от крутящейся пластины благодаря аэродинамической форме слайдера.

А так как это очень маленькие расстояния, и все детали движутся на огромных скоростях. Внутри корпуса есть циркуляционный фильтр (recirculation filter), он находится на пути потоков воздуха, создаваемый вращением пластин, этот фильтр постоянно собирает и задерживает мельчайшие частицы которые могли бы повредить пластины и хранящуюся на них информацию или вывести из строя магнитную головку. Кроме него, на обратной стороне корпуса и на крышке имеются маленькие, почти незаметное отверстия (breath hole). Они служит для выравнивания давления и прикрыты фильтром (breath filter), которые так же задерживают частицы пыли и влаги.

Внутренности гермоблока мы рассмотрели, давайте теперь вернёмся к контроллеру, так как очень сложная и важная часть жёсткого диска. Эта плата с разъёмами представляет собой интегральную схему, которая синхронизирует работу диска с компьютером и управляет всеми всеми процессами внутри hdd. Перевернув плату, можно увидеть что это целый микрокомпьютер со своим процессором, оперативной и постоянной памятью и есть своя система ввода/вывода.

Чип с большим количеством ножек это MCU - контроллер который занимается всеми расчётами и преобразует аналоговый сигнал с головки в цифровой и наоборот. Для ускорения этих операций рядом распаян чип с памятью DDR SDRAM. Который служит в роли буфера для хранения промежуточных данных, которые уже считаны с жесткого диска, но еще не были переданы для дальнейшей обработки, а также для хранения данных, к которым система обращается довольно часто.

А вот два других крупных чипа это Flash память и её контроллер. Они действует как большой кэш для часто используемых данных, для повышения производительности. Но эти чипы устанавливаются только в гибридных HDD и в большенстве дисков их нет.
(по сути это ssd внутри hdd=SSHD).

Так же, важным чипом является контроллер управления двигателем и головками VCM controller, так как, он управляет питанием MCU, Блоком магнитных головок внутри гермозоны и двигателем hdd.

Так же на плату устанавливаются датчики вибрации (shock sensor) которые определяет уровень тряски и в случаи высокой интенсивности отправляют сигнал VCM контролеру на корректировку движения головок или на их парковку и выключение hdd. В действительности, эти датчики плохо работают, так что лучше не трясти и не ронять жёсткий.

Компоненты hdd мы рассмотрели, давайте теперь свяжем всё это вместе чтобы был понятен сам принцип работы жесткого диска.

При подаче питания на Жёсткий диск, двигатель расположенный внутри корпуса начинает раскручивать шпиндель на котором закреплены магнитные пластины. И пока пластины ещё не набрали обороты, чтобы между головкой коромысла и диском образовалась воздушная подушка, головки запаркованы у шпинделя у центра, чтобы не навредить секторам с информацией и самой головке. Как только обороты достигают нужного уровня, сервопривод (электромагнитный двигатель) приводит в движение коромысло, которое уже позиционируется в то место, откуда нужно считать служебную информацию о состоянии жесткого диска и других необходимых сведениях о нем, эта область со служебной информацией называется нулевой дорожкой. После неё уже считываются все остальные данные хранящиеся на диске.

Ну а в случае когда питание, резко прекращается, двигатель переходит в режим генератора, и энергия от вращения шпинделей превращается в электрическую энергию, благодаря которой, головки безопасно паркуются и не повреждаются.

Как вы видите, жёсткий диск удивительное и сложное инженерное устройство. Надеюсь, что я смог достаточно понятно и подробно представить для вас базовую информацию об его устройстве.
Подключение двигателя от HDD, CD, DVD. Дополнение к теме форума "Помоги с запуском двигателя от жесткого диска!"
Перечитывая на досуге форум я наткнулся на тему "Помоги с запуском двигателя от жесткого диска. " . Тема безусловна интересная особенно для начинающих радио-"мучителей", но на мой взгляд раскрыта далеко не полностью. Нет логического завершения, а именно какую схему использовал много уважаемый, TwIsTeR для своего решения, предложенную ли (моим коллегой по журналистскому труду) S anyaav на М/С TDA5145, МК или какую то другую. Этой статьёй я хочу дополнить некоторые пробелы форума и расскажу, на мой взгляд, о вполне достойной хоть по современным меркам и старенькой микросхеме LB 11880. И так приступим и начнём с общих сведений, что же такое двигатель от HDD, CD-ROM, DVD-ROM

Двигатель, вращающий шпиндель жесткого диска (или CD/DVD-ROM)- это синхронный трёхфазный мотор постоянного тока.
Раскрутить такой двигатель можно подключив его к трём полу мостовым каскадам, которые управляются трёхфазным генератором, частота которого при включении очень мала, а затем плавно повысится до номинальной. Это не лучшее решение задачи, такая схема не имеет обратной связи и следовательно частота генератора будет повышаться в надежде, что двигатель успевает набрать обороты, даже если на самом деле его вал неподвижен. Создание схемы с обратной связью потребовало бы применения датчиков положения ротора и несколько корпусов ИМС не считая выходных транзисторов. CD/DVD-ROM уже содержат датчики холла, по сигналам которых можно определить положение ротора двигателя, но иногда, совсем не важно точное положение и не хочется впустую тянуть "лишние провода".
К счастью, промышленность выпускает готовые однокристальные драйверы управления, которым к тому же им не требуются датчики положения ротора, в роли таких датчиков выступают обмотки двигателя. Микросхемы управления трёхфазными двигателями постоянного тока, которым не требуются дополнительные датчики (датчиками являются сами обмотки двигателя): TDA 5140; TDA 5141; TDA 5142; TDA 5144; TDA 5145 и конечно же LB 11880. (Есть и некоторые другие, но в другой раз.)
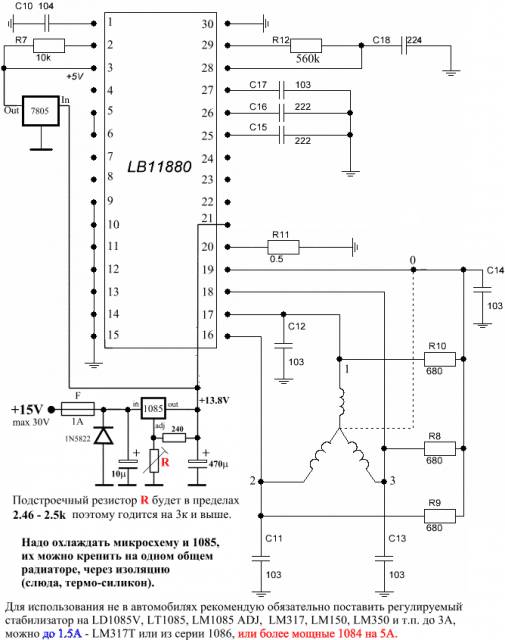
Принципиальная схема подключения двигателя к микросхеме LB11880.
Изначально, эта микросхема предназначена для управления двигателем БВГ видеомагнитофонов, в ключевых каскадах у неё биполярные транзисторы а не MOSFET. В своих конструкциях, я использовал именно эту микросхему, она во-первых, оказалась в наличии в ближайшем магазине, во-вторых, её стоимость была ниже (хоть и не на много), чем у прочих микросхем из выше приведенного списка.
Собственно, схема включения двигателя:
Если ваш двигатель вдруг имеет не 3 а 4 вывода, то подключать его следует согласно схеме:
И ещё одна более наглядная схема, адаптированная для использования в автомобиле.
Немного дополнительной информации об LB11880 и не только
Двигатель, подключенный по указанным схемам будет разгоняться до тех пор, пока либо не наступит предел по частоте генерации VCO микросхемы, которая определяется номиналами конденсатора подключенного к выводу 27 (чем его ёмкость меньше, тем выше частота), либо двигатель не будет разрушен механически. Не следует слишком уменьшать ёмкость конденсатора подключенного к выводу 27, так как это может затруднить пуск двигателя.
Как регулировать скорость вращения?
Регулировка скорости вращения производится изменением напряжения на выводе 2 микросхемы, соответственно: Vпит - максимальная скорость; 0 - двигатель остановлен.
Однако, необходимо отметить, что плавно регулировать частоту просто применив переменный резистор не удастся, так как регулировка не линейна и происходит в меньших пределах чем Vпит - 0, по этому лучшим вариантом будет подключение к этому выводу конденсатора на который через резистор, например от микроконтроллера подаётся ШИМ сигнал ну или ШИМ регулятор на всемирно известном таймере NE 555(таких схем в инете полно)
Для определения текущей частоты вращения следует использовать вывод 8 микросхемы, на котором при вращении вала двигателя присутствуют импульсы, по 3 импульса на 1 оборот вала.
Как задать максимальный ток в обмотках?
Известно, что трёхфазные двигатели постоянного тока потребляют значительный ток вне своих рабочих режимов (при питании их обмоток импульсами заниженный частоты). Для выставления максимального тока в данной схеме служит резистор R1. Как только падение напряжения на R1 и следовательно на выводе 20 станет более 0.95 вольта, то выходной драйвер микросхемы прерывает импульс. Выбирая значение R1, учитывайте, что для данной микросхемы максимальный ток не более 1.2 ампера, номинальный 0.4 ампера.
Параметры микросхемы LB11880
Напряжение питания выходного каскада (вывод 21): 8 . 13 вольт (максимально 14.5);
Напряжение питания ядра (вывод 3): 4 . 6 вольт (максимально 7);
Максимальная рассеиваемая микросхемой мощность: 2.8 ватта;

Вот этот диск (правда когда на нём ещё не было медных болтов), казалось бы мелкий и чахлый двигатель от старенького винчестера на 40Гб, рассчитанный на 7200 оборотов/мин (RPM) умудрялся разгоняться примерно до 15000 . 17000 оборотов/мин, если не ограничивать его скорость. Так что область применения двигателей от завалящих винчестеров, думаю весьма обширна. Точило/дрель/болгарку конечно не сделать, даже не думайте, но без особой нагрузки, двигатели способны на многое.
Ф айловый архив для самостоятельной сборка качаем >

Посмотрев это видео, я решил повторить конструкцию.
Заказал на alexpress регулятор скорости, и спустя несколько недель получил его.
Регулятор представляет собой простую платку с крутилкой:
Для опытов достал с ящика старый жесткий диск на 3.5 дюйма. Сперва начал разбирать, потом вспомнил что надо его сфотографировать:
Продолжаю разбирать:
Неодимовые магниты я пускаю в дело. С их помощью удобно вешать разный инструмент на железную стенку того же блока питания. Микросхемы выкидываю в мусорку. Винтики убираю в коробку с разными болтами и винтиками, вдруг в будущем пригодятся. А сам корпус жесткого диска с мотором уже можно приспособить под мининаждак:
Схема подключения очень простая. Два провода (красный и чёрный) — это плюс и минус внешнего источника питания. А остальные желтый белый и зеленый припаиваю к контактам моторчика:
Проверяю.
Лампочки на регуляторе горят, питание есть, мотор крутится. При работе мотора потребление не очень большое:
Доходит до 0.5А лишь при нагрузке, когда что-то точишь. Но это тоже совсем мало, поэтому сгодится любой блок питания на 12V.
В качестве наждачного диска у меня будет использоваться кусок наждачной бумаги. Вырезал его по размеру диска на моторе:
Прижал шайбой, которая держит жесткий диск. Включил, работает:
Скорость приличная, к тому же еще может регулироваться.
Считай, что конструкция уже готова.
Что можно ей сделать? Можно, например, подточить замятую отвертку:
Можно подточить винтик:
Можно подточить какую либо деталь из 3Д принтера или из того же полиморфа:
А можно разобрать всё и выкинуть в мусорку. Так как для серьёзной работы такой наждак не сгодится. Так, побаловаться только.
Хотя думаю если поменять крепёж диска, или, например, попробовать поставить небольшой диск от болгарки, то можно подтачивать кухонные ножи, которые не сильно жалко.
А еще можно вытащить мотор из корпуса, нацепить на него лопасти, сделать корпус и получится вентилятор с возможностью регулировки скорости обдува. Но это надо прям совсем морочиться, а мне не очень хочется.
Если прям включить фантазию, то вариантов использования мотора из жесткого диска и данного регулятора много. Всё зависит от кривизны рук и потребностей. Я показал лишь самый простой вариант.
На этом весь мой обзор. Всем хорошего настроения и прямых рук.
Читайте также: