
Как сделать управление к машинке
Добавил пользователь Валентин П. Обновлено: 05.10.2024
Вот только что был у нас проект - подключение модуля Bluetooth к плате Марсоход. И плата Марсоход и модуль Bluetooth были установлены на машинке. Такая машинка ездила под управлением Scratch программы работающей на компьютере.
Сегодня мне пришла в голову мысль: "А почему бы не использовать сотовый телефон с Bluetooth , как пульт управления к машинке?"
Ну так вот, сделал:
Как я это делал - это конечно целая история.
У меня есть довольно старенький телефон. Не Android и не iPhone. Обычная Nokia с операционной системой Simbian OS v9.1. На телефоне есть Bluetooth и Java.
Значит нужно писать программу на Java. Честно говоря не могу похвастаться знанием этого языка программирования. Однако мы не привыкли отступать. Отправляемся в Google и Yandex. Наша задача найти и скачать среду программирования для Java для телефонов и какие нибудь готовые примеры для работы с Bluetooth .
Довольно быстро я вышел на страницу Оракла: http://www.oracle.com/technetwork/java/index-jsp-137162.html На этой странице есть ссылки на скачивание Java ME SDK и на скачивание Sun Java Wireless Toolkit. Я скачал оба. Честно говоря Java ME SDK мне не понравилась. Слишком там много всего не понятного. Хотя там прямо "среда разработки". Наверное сильная вещь, но долго разбираться. А вот Sun Java Wireless Toolkit мне понравился Он примитивный, как раз для моего уровня подходит. Там всего "3 кнопки" - создать проект, откомпилировать, запустить. Редактировать тексты не где - нет для этого среды. Использую внешний редактор - notepad.
С обоими средствами программирования идут какие-то примеры, в том числе и c использованием Bluetooth . Еще порылся в google.
В конце концов, взяв несколько разных примеров из интернета, кое как слепив их до кучи, получилась у меня программа. Не ручаюсь, что там все правильно (как я уже сказал, я не знаю языка Java, имею только общие представления). Основной критерий написания - компилятор не должен давать ошибок . Тем не менее, похоже программа работает.
Вы можете выкачать мою программу здесь:
В этом архиве и исходные тексты, проект для Sun Java Wireless Toolkit, и сами бинарные файлы. Раскройте архив, в папке BIN есть btctrl.jar и btctrl.jad файлы. Их нужно перенести на телефон и с них установить Java приложение.
Вам нужна машинка с платой Марсоход и модуле Bluetooth , как в том проекте.
Теперь все просто. Включаем машинку. Запускаем на телефоне программу. Программа ищет в округе устройства Bluetooth и показывает их список. Выбираем то устройство, про которое телефон пишет SerialPort. телефон спрашивает разрешение на подключение, соглашаемся и все - можно управлять машинкой. При нажатии на кнопки влево, вправо, вверх, вниз на экране телефона рисуется соответствующая направлению стрелка и наша машинка едет!
Радиоуправляемые игрушки можно увидеть в руках каждого ребенка. Магазины переполнены разнообразными гаджетами и самым интересным на сегодняшний день будет собрать машинку на радиоуправлении своими руками.
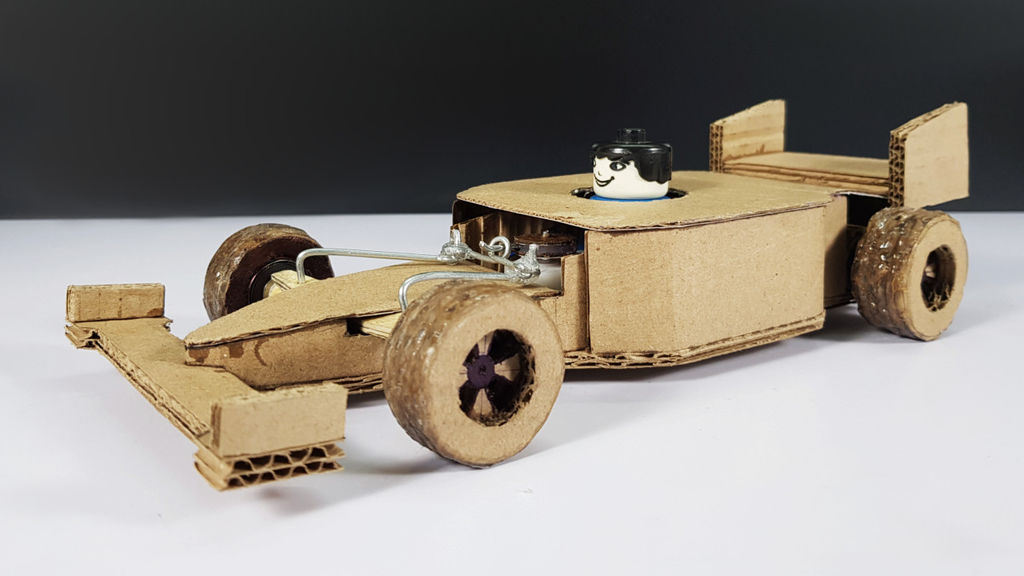
В этой инструкции я хочу показать вам, как сделать машинку на радиоуправлении своими руками. Вместо изготовления простой радиоуправляемой машинки, мы будем собирать картонную гоночную машинку F1. Картон общедоступен и делает возможным каждому собрать такую машинку прямо дома.
Все материалы для изготовления машинки легкодоступны каждому, также в статье есть ссылки для покупки деталей онлайн.
Шаг 1: Смотрим видео
Видео — замечательная вещь, позволяющая глубоко вникнуть в особенности и понять процесс изготовления. Но я также рекомендую просмотреть все шаги инструкции для изучения дополнительных сведений и картинок.
Шаг 2: Детали
- Высокоскоростной DC моторчик (Ebay или Amazon)
- DC моторчик с шестерёнкой (Ebay или Amazon)
- Модуль TP4056 (Ebay или Amazon)
- Литий-ионный аккумулятор (Ebay или Amazon)
- Выключатель (Ebay или Amazon)
- Пластиковые шестерёнки (Ebay или Amazon)
- Подшипник (Ebay или Amazon)
- Палочка от мороженого (Ebay или Amazon)
- Пистолет для горячего клея (Ebay или Amazon)
- Канцелярский нож (Ebay или Amazon)
В местных магазинах купите: картон, деревянные палочки, зубочистки, плату для схемы Rx Tx и провода.
Заметка: схема, которую я использовал, была добыта из старой сломанной радиоуправляемой машинки.
Шаг 3: Изготавливаем основу и заднюю ось
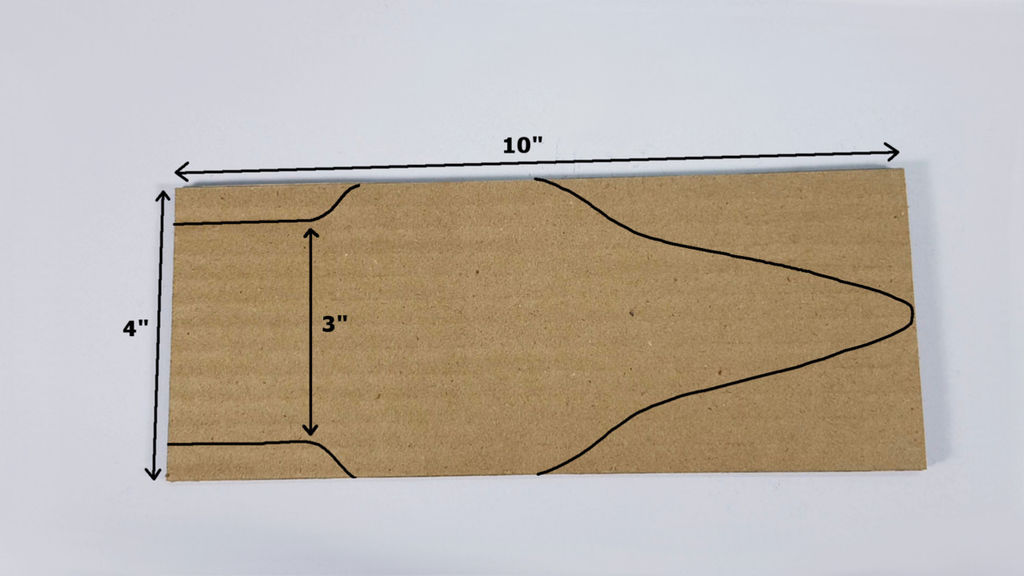


- Отрежьте кусок картона примерно 10*25 см
- Основываясь на картинке сверху, вырежьте основу для машинки F1
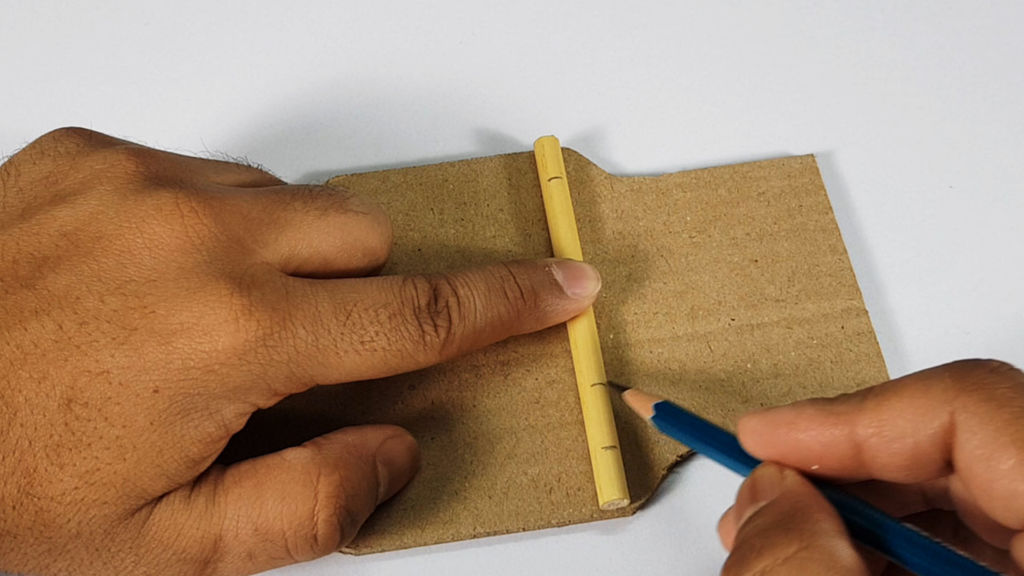
- Вырежьте деревянную палочку длиной 10см и сделайте на ней три отметки, как показано на картинке
- Возьмите пластиковую шестерёнку и просверлите отверстие, равное диаметру деревянной палочки
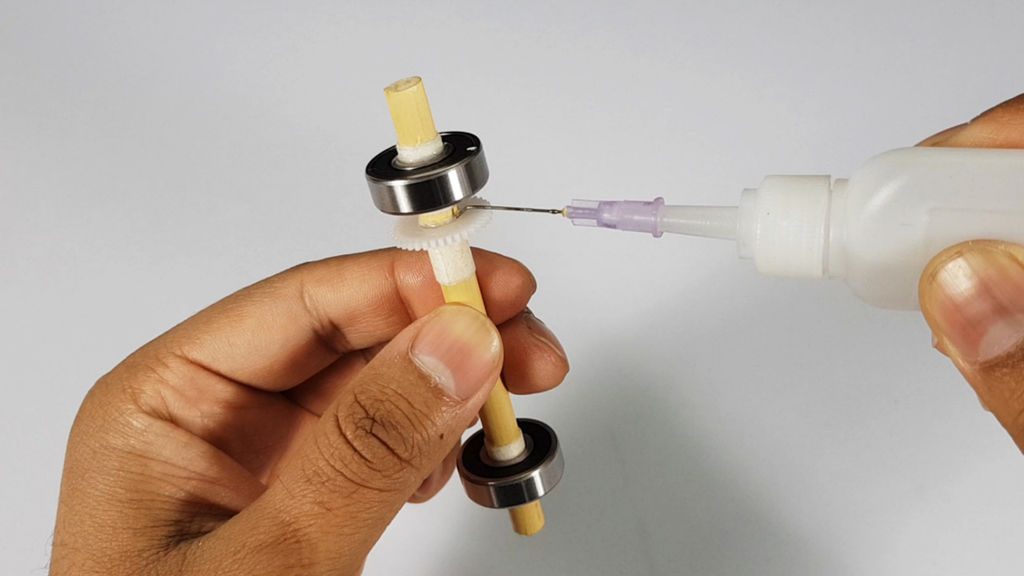
- Закрепите шестерёнку на второй отметке и приклейте её суперклеем
- Закрепите подшипники на остальных двух отметках и также закрепите их суперклеем
Заметка: Для увеличения диаметра палочки можно использовать изоленту.
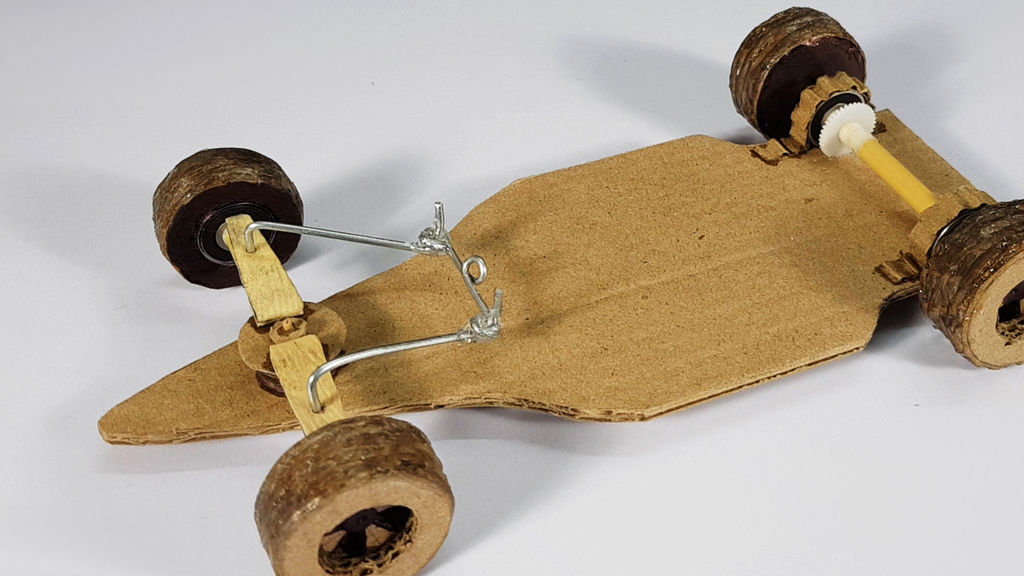
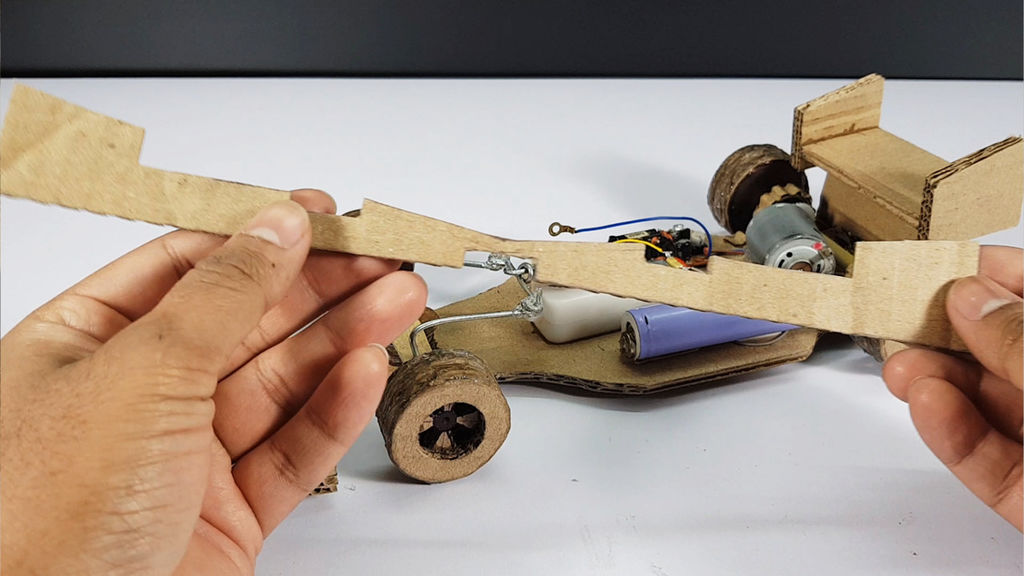
Шаг 4: Изготавливаем самодельный рулевой механизм
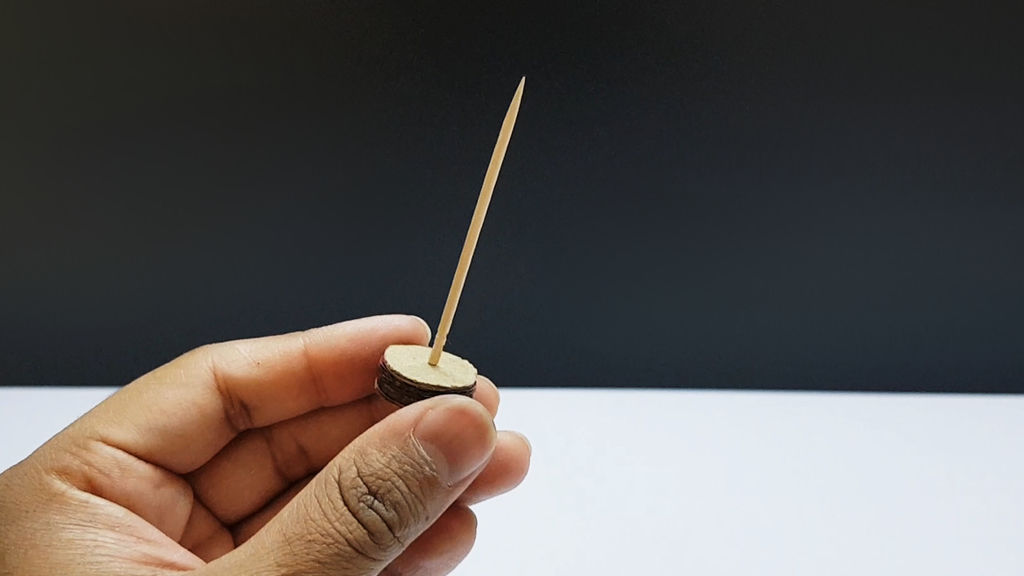
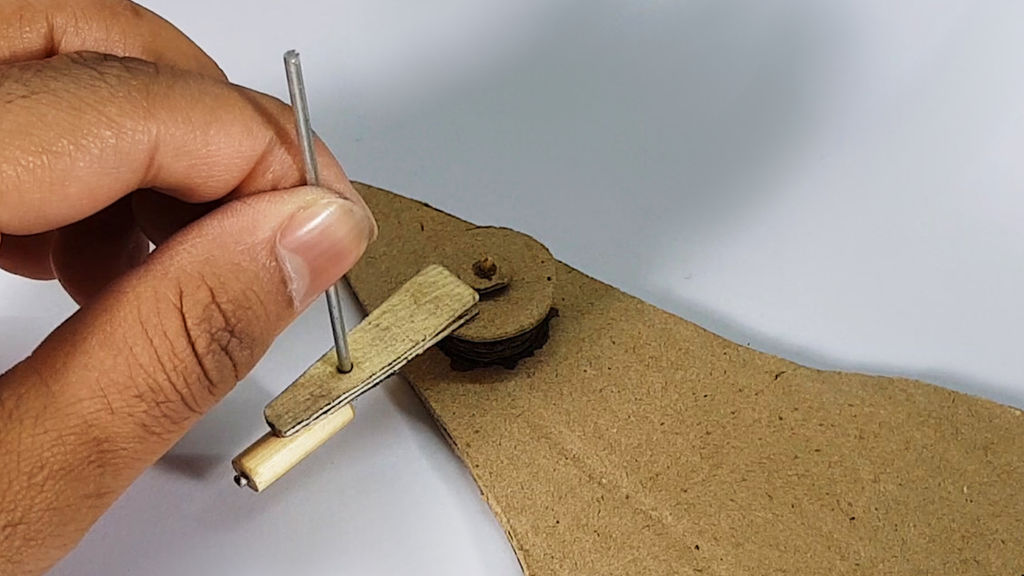
- Вырежьте несколько кружков из картона и сложите их один на другой.
- Просверлите отверстие в их центрах и закрепите там зубочистку.
- Поместите круглую картонку с зубочисткой в нос основы машинки, как показано на картинке.
- Вставьте еще один кусочек картона поверх зубочистки и закрепите его суперклеем, так чтобы он мог свободно вращаться.
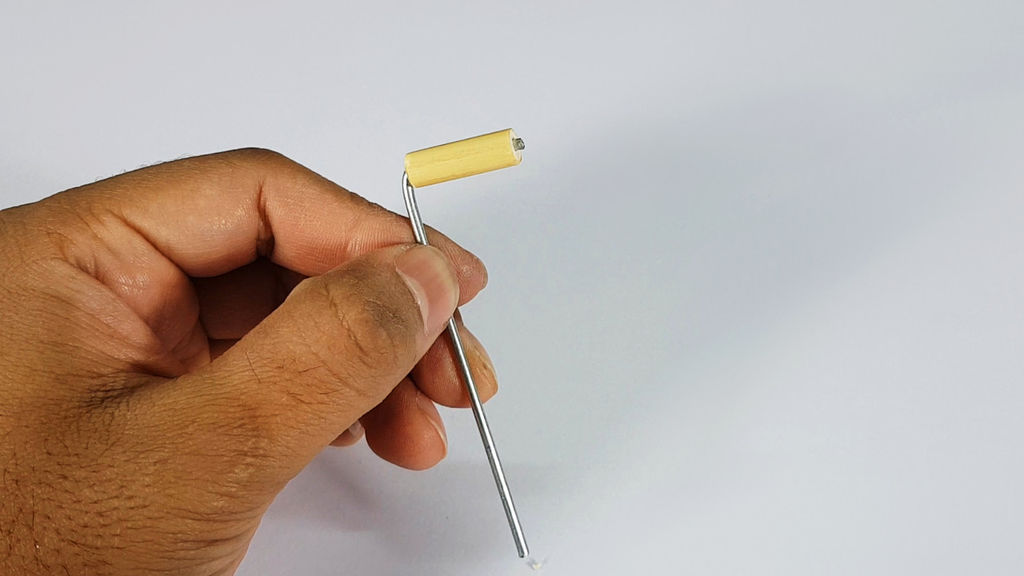
- Возьмите кусочек толстой стальной проволоки (как с настенного календаря) и согните её под углом 90° на расстоянии примерно 2,5 см.
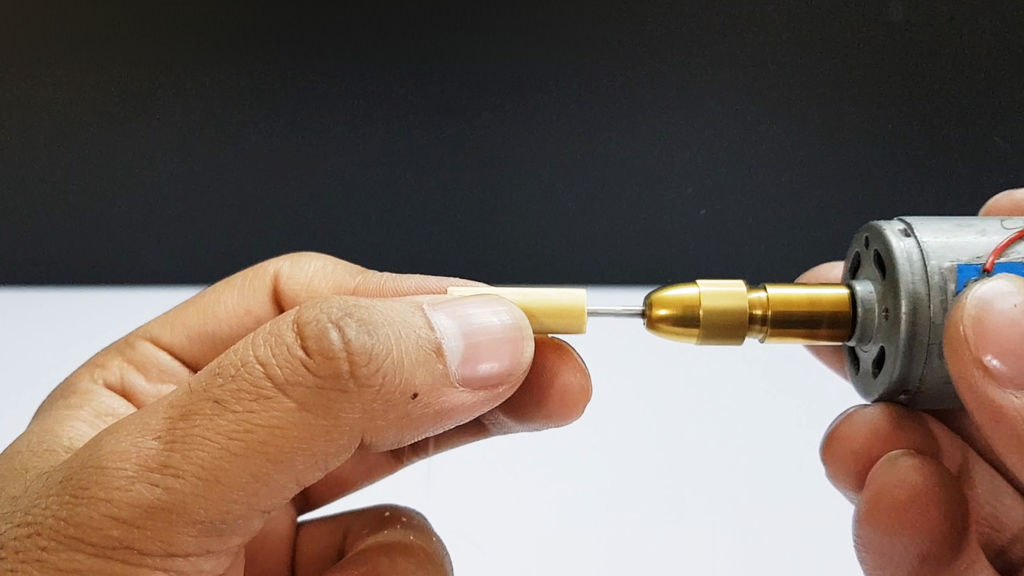
- Вырежьте деревянную палочку и сделайте отверстие в её центре при помощи мини-дрели.
- Вставьте толстую проволоку в отверстие и закрепите её суперклеем.
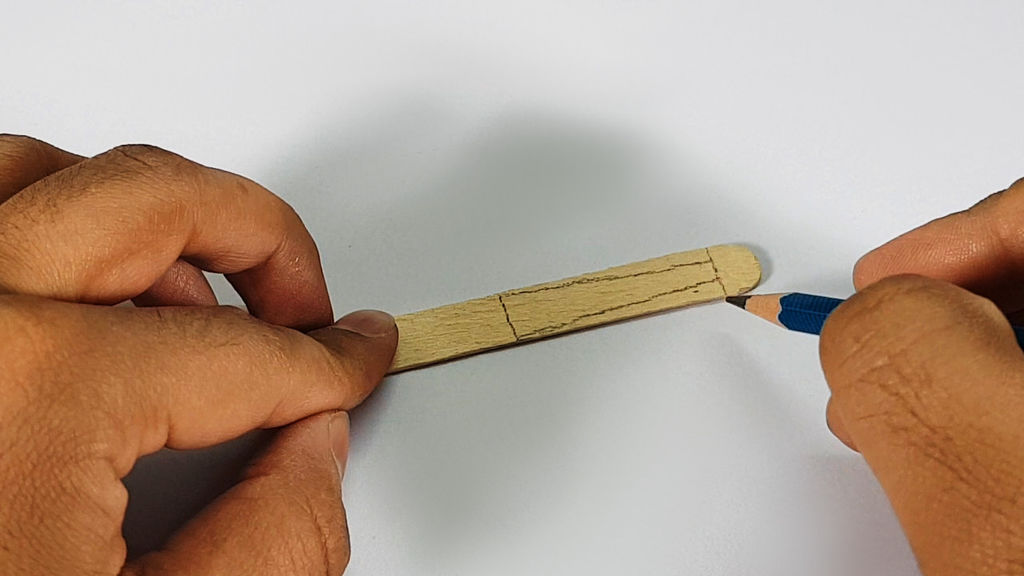
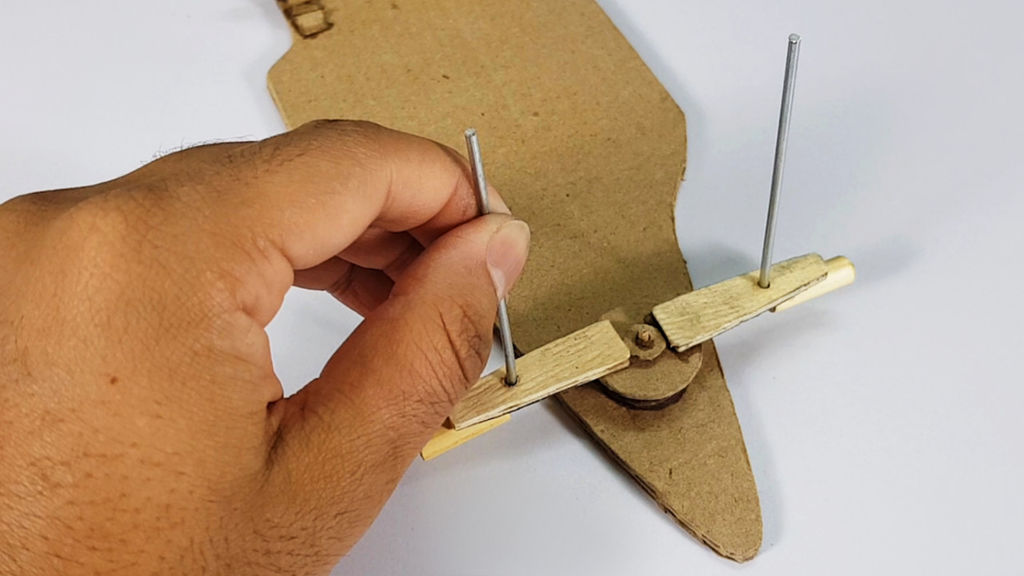
- Вырежьте несколько кусочков из палочки от мороженого, как показано на рисунке, и сделайте в них отверстия примерно на 3/4 от центральной точки.
- Соберите части вместе и закрепите их на основе машинки, как показано на картинке.
Заметка: обязательно посмотрите видео, чтобы избежать ошибок.
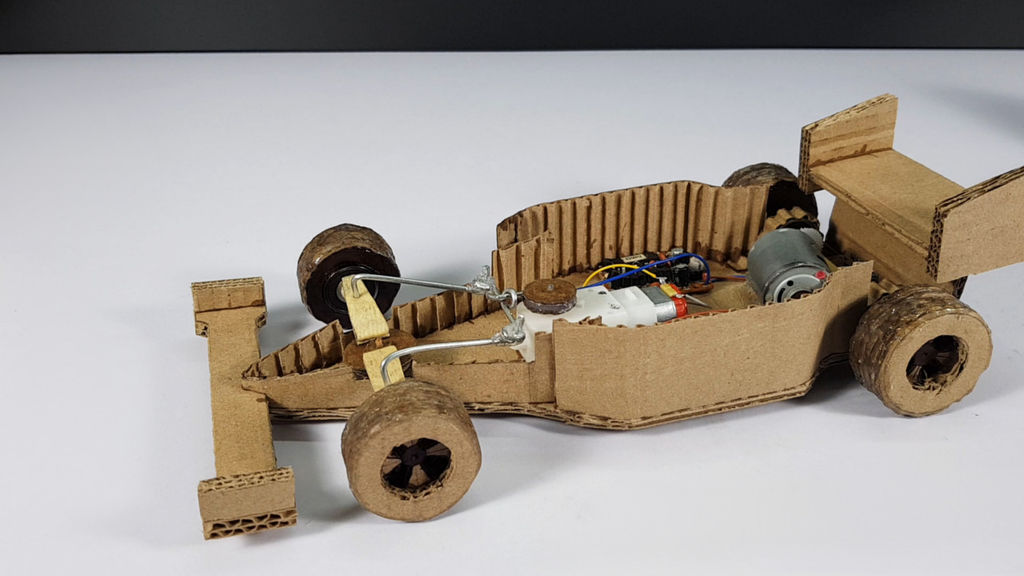
Шаг 5: Изготавливаем картонные колёса
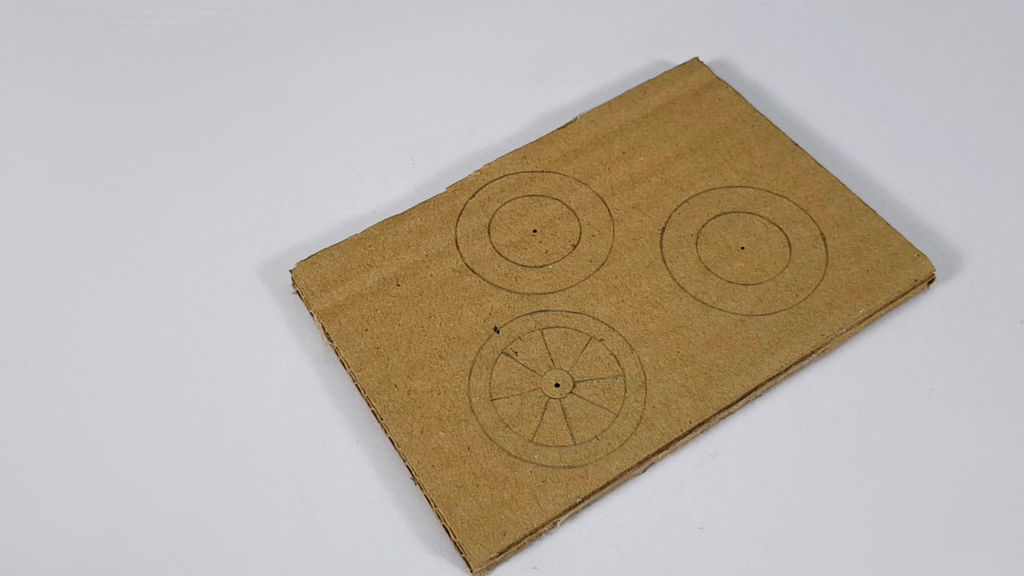




- Нарисуйте на картоне три круга примерно 4 см в диаметре.
- Поместите подшипник в центр круга и обведите вокруг него круг.
- На одном из кругов нарисуйте несколько спиц.
- Вырежьте кружочки и положите один на другой, чтобы создать толстое колесо.
- Поместите подшипник на колесо и закрепите его суперклеем.
- Сделайте два колеса с подшипниками и два без подшипников.
- Прикрепите колёса к машинке F1 и закрепите их суперклеем.
Шаг 6: Создаём электроуправление
- Используя плоскогубцы, закрепите оба провода как показано на картинке.
- Возьмите моторчик с шестерёнкой и прикрепите круглую картонку на его валу.
- Положите кусок толстого провода поверх картонки.
- Добавьте горячего клея и проложите проволоку между слоями картона.
- Прикрепите мотор к рулевому механизму и протестируйте его, чтобы убедиться, что он работает хорошо.
Заметка: Невозможно с помощью слов объяснить всё правильно, так что я рекомендую посмотреть видео и избежать возможных сомнений.
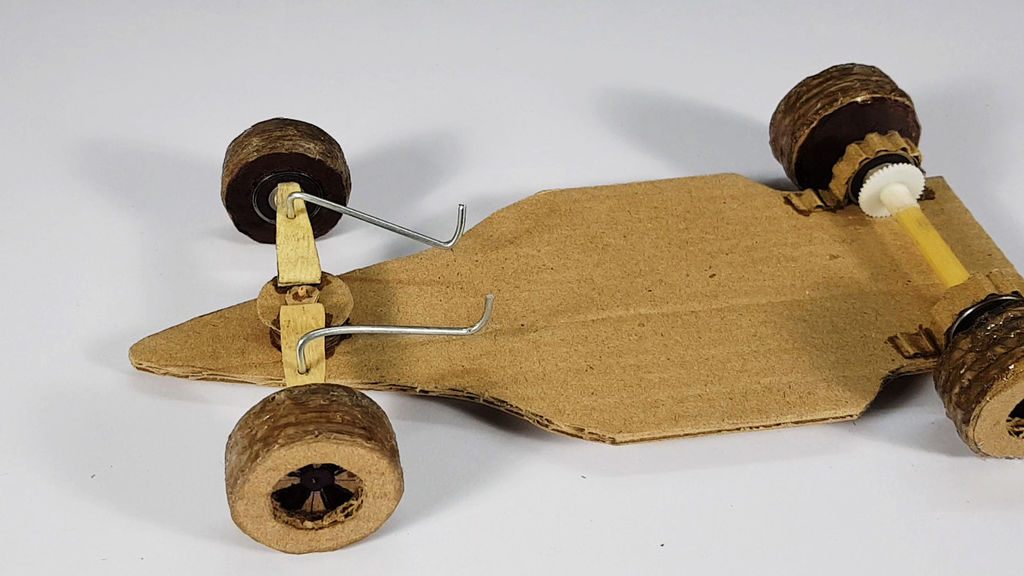
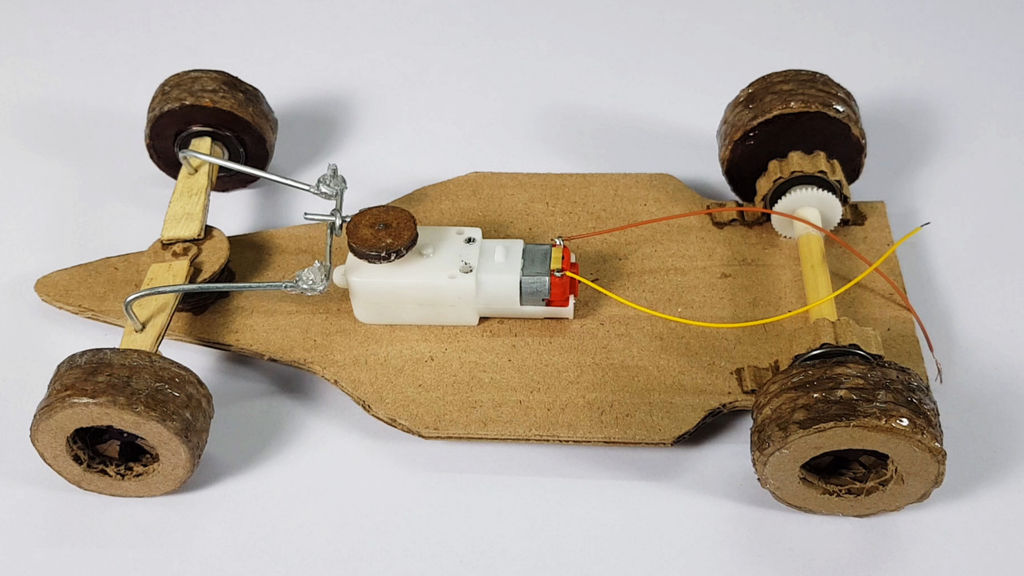
Шаг 7: Соединяем компоненты
- Возьмите высокоскоростной мотор и закрепите маленькую пластиковую шестерёнку на его валу.
- Поместите моторчик на основе машинки и закрепите его горячим клеем, этот моторчик будет приводить в движение заднюю ось машинки.
- Поместите модуль TP4056 в заднюю часть машинки.
- Соедините выключатель с модулем зарядки.
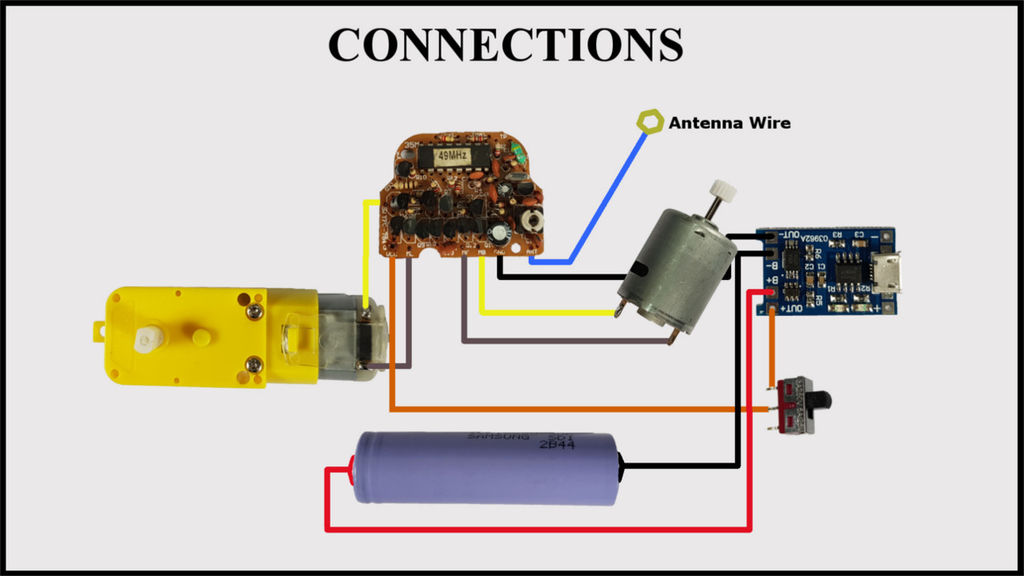
- Достаньте схему приёмника из старой сломанной радиоуправляемой машинки, или сделайте свой по одной из схем, которые можно найти в интернете.
- Ссылаясь на приложенную выше схему, соедините вместе все компоненты.
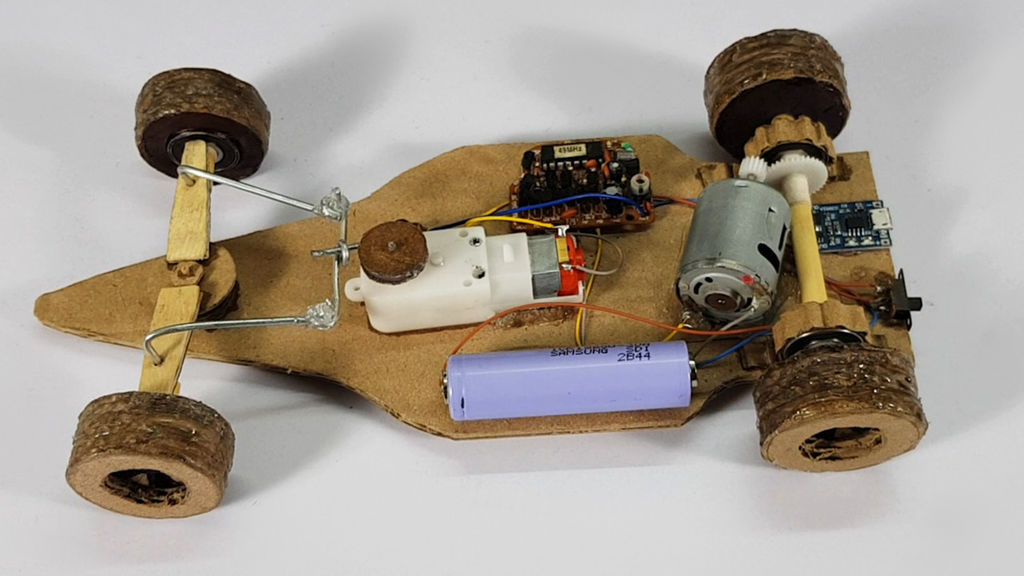
Шаг 8: Создаём элементы кузова



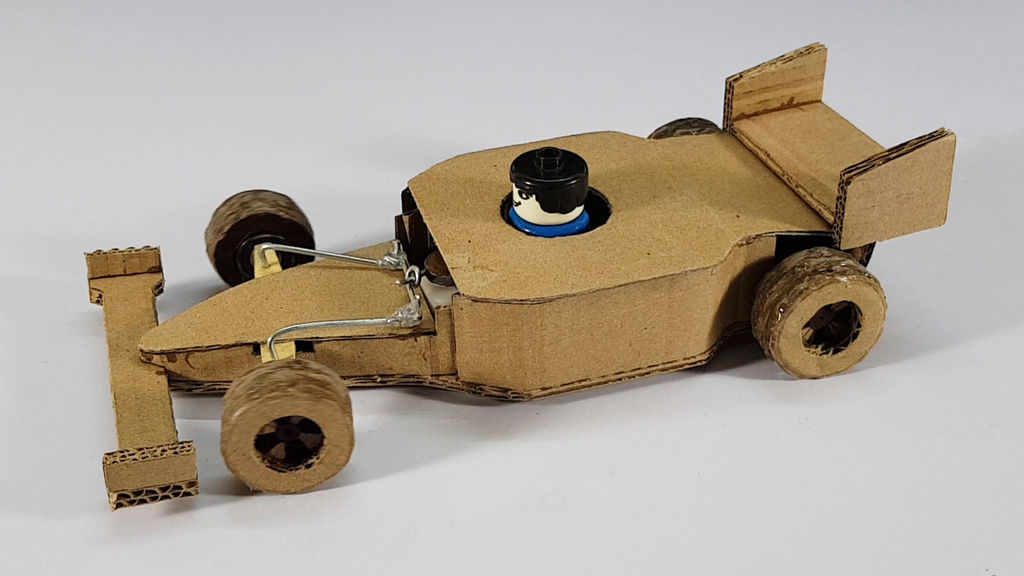
- Сделайте переднее крыло из картона и прикрепите его к кузову суперклеем.
- Таким же образом сделайте и прикрепите заднее крыло.
- Завершите создание кузова, вырезав и приклеив нужные картонные части.
- Для изготовления кузова, ссылайтесь на приложенные картинки.
После завершения работ над кузовом, наша самодельная машинка на пульте управления готова. Подключите 5V зарядник, чтобы полностью зарядить аккумулятор. Возьмите пульт и приготовьтесь к весёлой части инструкции: видео.
Шаг 9: Дополнительно
Дополнительно можно озвучить голосом предстартовый отсчет 3-2-1-Старт и использовать его для старта гонки.
Рассказываю как сделать какую-либо вещь с пошаговыми фото и видео инструкциями.
Большинство моделей современных детских электромобилей оборудованы пультом дистанционного управления, при помощи которого можно контролировать действия маленького водителя на расстоянии до 30 метров, в зависимости от типа, модели и производителя.
Первый автомобиль с ДУ
Идея оборудовать детский автомобиль с электродвигателем контроллером впервые появилась у инженеров компании Peg Perego, одного из лидеров на рынке детского электротранспорта. Первая модель, которой можно было управлять удалённо стала Go Buggy Go, до 2012 года носившая название RC Buggy, предназначенная для детей в возрасте от 1 до 3 лет
В отличие от распространённых на то время моделей, где родителям было необходимо постоянно находиться возле маленького водителя, с пультом можно было делать это удалённо, сидя на лавочке, либо медленно прогуливаясь. Пульт RC Buggy позволял менять траекторию движения при помощи специального колёсика, имитирующего руль. Такое решение сделало модель бестселлером, а идея стала настолько успешной, что большинство современных моделей детских электромобилей комплектуются пультом дистанционного управления.
Преимущества электромобиля с пультом дистанционного управления
- обеспечение безопасности катания;
- возможность ограничения радиуса поездки;
- развлечение не только для детей, но и для взрослых;
- возможность совместной игры с ребёнком.
Алгоритм работы контроллера довольно просто и схож для большинства моделей: с его помощью можно изменять траекторию поездки, включать, отключать дополнительные скорости, ускоряться/тормозить электромобилем. На некоторых моделях присутствует кнопка экстренного торможения, а также ряд других дополнительных опций.
Пульт особенно актуален, если вы решили купить детский электромобиль ребёнку от 1 года на вырост. В таком случае, при помощи контроллера, можно придать уверенности движениям маленького водителя, что позволит ребёнку не боятся управлять автомобилем самостоятельно.
Типы пультом дистанционного управления
На данный момент большинство производителей предлагает электромобили с ДУ следующих типов:
Каждое решение имеет свои преимущества и недостатки.
Радиоуправляемые ПДУ (27 ГЦ):
Чаще всего можно встретить пульты такого типа и внешнего вида: Buggy Go, CT, СТ-568, AK-8500, 40Hz BMW Z4.
ПДУ 2,4 Ггц:
Настройка ПДУ в зависимости от его модели
Каждый пульт имеет свои особенности подключения и синхронизации с детским электромобилем. Перед попыткой подключения рекомендуется вынуть из него батарейки либо нажать кнопку полного сброса.
Чёрный пульт с тремя функциональными кнопками

Алгоритм настройки выглядит следующим образом:
- зажать кнопку Car Select, расположенную слева ряду функциональных клавиш и удерживать её в течение 5-7 секунд;
- о готовности пульта дистанционного управления к установке соединения с автомобилем просигнализирует индикатор, которые замигает посередине сверху;
- включить электромобиль;
- о том, что контроллер сопряжен с игрушкой и готов к работе, он просигнализирует миганием трёх индикаторов.;
Оранжевый ПДУ с чёрными кнопками

Пульт для AutoKinder и Chien Ti




Пульт такого типа может иметь разные расцветки, форму, но схожее расположение кнопок. Настройка таких контроллеров происходит по следующей схеме:
- нажать функциональную клавишу Car Select, расположенную снизу и удерживать её на протяжении 5-7 секунд. Кнопка немного утоплена в корпус, что исключает её случайное нажатие. Чтобы к ней добраться можно использовать обычную скрепку или зубочистку;
- о готовности пульта дистанционного управления к установке соединения с автомобилем просигнализирует индикатор, которые расположен слева от кнопки Car Select;
- включить электромобиль;
- о том, что контроллер сопряжён с игрушкой и готов к работе, он просигнализирует миганием трёх индикаторов, символизирующих количество скоростей, доступных в детском электромобиле.
Пульт типа Weelye
Настройка пульта осуществляется следующим образом:
- зажать кнопку "Weelye" (посередине сверху) и держать 4-7 секунды;
- подождать, пока заморгают индикаторы (посередине) и отпустить кнопку;
- включить электромобиль, индикаторы должны загореться постоянно или потухнуть.
Белый пульт с чёрными кнопками для Mercedes и других моделей

Такой пульт дистанционного управления не имеет кнопки Car Select, для его подключения к детскому электромобилю необходимо выполнить следующую инструкцию:
Если ваш пульт вышел из строя и вы не знаете, как выбрать подходящую модель, обратитесь к консультантам магазина или работникам сервисного центра, которые определят причину неисправности и сделают всё, включая ремонт, диагностику, тюнинг, подбор и установку комплектующих, чтобы детский электромобиль радовал вашего ребёнка долгие годы. Мы готовы забрать ваше авто из любой точки города и вернуть его в кратчайший срок в исправном состоянии.
Настройка пульта дистанционного управления — простая процедура, которая занимает менее минуты и требует минимум навыков, достаточно нажать несколько клавиш и можно не переживать за безопасность ребёнка, полностью контролируя его поездку.

Логика работы следующая: передатчик измеряет показания потенциометров, преобразует в нужный диапазон для управления и отправляет по радио 10 раз в секунду. Приёмник принимает и раздаёт сигналы на мотор и сервопривод.
Библиотека Gyver433 позволяет передавать любые данные, поэтому для удобства и наглядности сделаем структуру. Для скорости используем int, значения в нашем случае не будут превышать -255.. 255. Для поворота руля серво хватит byte, так как диапазон поворота серво составляет 0.. 180 градусов. Структура выглядит так:
Передатчик
Зададим константами пины подключения, для удобства дальнейшей работы:
Далее нам нужны пределы сигналов с потенциометров руля, газа и заднего хода, чтобы масштабировать этот диапазон для отправки:
У сервы и мотора тоже есть пределы, предлагаю ввести их на стороне передатчика, чтобы для настройки прошивать только его и не разбирать машинку:
Данные значения опять же настраиваются под своё железо и предпочтения.
Затем подключаем библиотеку и настраиваем радио. Я буду использовать FAST режим и скорость 3000, “зелёные” радиомодули отлично работают в таком режиме.
В блоке setup() запустим Serial для вывода сигналов с потенциометров. После настройки Serial можно будет отключить (закомментировать строку):
В блоке loop() последовательно выполняем следующие действия:
Читаем аналоговый сигнал со всех трёх элементов управления:
Выводим сырые значения в порт, чтобы настроить по ним диапазоны. После настройки вывод можно убрать:
Далее приводим эти значения к указанным диапазонам для серво и мотора, и на всякий случай ограничиваем:
Слишком часто отправлять нет смысла, поэтому введём задержку на 10 мс (отправка 100 раз в секунду). Если вы будете модифицировать данный проект и задержка будет мешать – отправку всегда можно сделать по таймеру на millis() (см. уроки).
Приёмник
В приёмной части тоже задаём пины:
Также я ввёл такую настройку, как минимальная скорость мотора. Например мы знаем, что машинка начинает ехать при значении сигнала ШИМ больше 45. В дальнейшей программе диапазон управления будет отмасштабирован таким образом, чтобы при небольшом “нажатии на педаль” значение ШИМ росло с 45 (или другого значения):
Далее подключаем библиотеку радио и настраиваем на такую же скорость, как у приёмника. Также у приёмника есть буфер, мы будем передавать 3 байта данных (int + byte), размер буфера ставим 3:
Подключаем библиотеку серво и создаём себе одну серву:
Для мотора я написал отдельный класс, который использует два ШИМ пина для равномерного управления. Он просто размещается в программе:
По сути, это мини библиотека. Создаём себе мотор с указанием пинов и минимального сигнала ШИМ:
В блоке setup() включаем Serial (если нужен для отладки, в рабочем проекте можно выключить), подключаем серво и разгоняем частоту ШИМ как в этом уроке:
В блоке loop() нам нужно опрашивать радио и раздавать сигналы управления на “железо”. Но начнём мы с другого: представьте, что вы ехали на полном газу, и тут вдруг пропал сигнал с радио. Машинка продолжит движение с той же скоростью. Чтобы обезопасить себя от этого, введём таймаут: если сигнала с радио не было дольше определённого количества времени – останавливаем мотор. На RC сленге это называется failsafe:
Далее нужно принять сигнал с радио (подробнее см. пример в библиотеке Gyver433). Если данные успешно приняты – сбрасываем таймаут и раздаём сигналы управления:
Также можно вывести отладочную информацию в порт, проверить, работает ли радио. В рабочей программе отладку можно закомментировать.
Полный код программы
Возможные доработки
Можно оставить только одну “педаль” – газ. В среднем положении потенциометра – стоп, вперёд и назад – соответственно вперёд и назад. Сделать это очень просто: убираем из кода всё что связано с педалью brake, а педаль газа масштабируем как
И отправляем по радио как
Видео
Добрый день.
Приобрел (на свою голову) две абсолютно одинаковые машинки. В результате обе управляются с одного пульта
Наверное нужно в одной машинке изменить частоту.
Подскажите плиз что нужно выпаять, что впаять, может заменить, чтобы изменить частоту и все работало.
Фотки плат машинки и пульта прилагаю.
Можете прямо на фотках пометить что на что необходимо заменить, если не сложно.
Заранее спасибо.






gromov3g, Посмотри кварцы на какие частоты на приемнике машинки и пульту,можно попробовать заменить, с небольшим разносом по частоте на какой то машинке,
на приемнике не видно обратную сторону платки,есть ли там кварц

gromov3g, Это на частоту 27,145мгц,,переставь к примеру 27,140 или 27,150, потом на пульту жмешь кнопку любую и на плате машинки крутни сердечник на катушке диэлектрической отверткой в право или в лево пока не будет исполнять команду,вообщем пробуй
Там приемник сверхрегенеративный с полосой пропускания что-то около 500 КГц. Надо сильно частоты разнести, чтобы модельки не мешали друг другу.
Народ выручайте.Есть машинка на радиоуправлении,захотел переделать на 433мгц,с пультом разобрался,а в самой машинке не понятно,снёс детали самого приёмника,припаивал сверхрегенератор ,не видит машинка пульт,стоит микросхема не понятная TXM AX-1,единственная с маркировкой,на микросхеме к которой подключены полевики маркировка затёрта,посмотрел по даташитам rx-1,rx-2,не совпадают.
Всем привет! Купил две машинки, обе на 27 Мгц. В машинке катушка, в пульте кварц. Почитал инфу и решил выбрать вариант с заменой кварца. Сначала кварц был заменен на 35 Мгц, заработало, но сердечник в катушке пришлось вкрутить на максимум и при этом дальность составила 2-3 метра (ваще не вариант!). Купил кварц на 24 Мгц, заменил и все получилось просто супер, немного выкрутил сердечник в катушке и дальность стала 10 метров, т.к. мне больше и не надо, я успокоился, все работает, теперь машинки друг другу не мешают! Если еще немного покрутить, аккуратно, то думаю дальность увеличится.
Читайте также: