
Как сделать так чтобы сервопривод медленно перемещался
Обновлено: 06.07.2024
Сервоприводы используют наряду с шаговыми двигателями в тех случаях, когда нужно позиционирование каких-либо механизмов и автоматическое управление ими. В этой статье мы рассмотрим, как подключить сервопривод к Arduino и управлять им.
Общие сведения о сервоприводах
По определению: сервопривод — это двигатель, управляемый отрицательной обратной связью. Если сказать простым языком, то это двигатель, способный находиться в заданном положении, и при воздействии на вал, его принудительном отклонении, привод удерживает его положение.
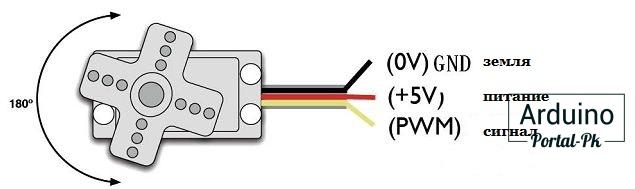
Большинство сервоприводов подключаются по трём проводам, их назначение такое:
2. Минус питания.
3. Управляющий сигнал.
Сам же сервопривод состоит из: Двигателя постоянного тока (или двигателя другого типа), платы управления и датчика положения. Если вал сервопривода способен поворачиваться на 360 градусов, то в качестве датчика положения используется энкодер, а у приводов, вал которых поворачивается лишь на 180° используется потенциометр. Кроме этого, двигатель и вал сервопривода соединяются через понижающий редуктор, который понижая скорость вращения вала двигателя, повышает момент на валу сервы.
Плата управления анализирует сигнал на управляющем проводе, и если информация об угле поворота содержащаяся в сигнале отличается от фактического положения вала, то он поворачивается до тех пор, пока его положение не равняется с заданным.
Перечислим основные характеристики сервоприводов:
- Скорость поворота (время поворота на угол 60°);
- Крутящий момент (кг/см), эта величина говорит о том, какой вес в килограммах выдерживает двигатель, при длине рычага в 1 см от вала);
- Напряжение питания и потребляемый ток;
Сервоприводы различают по способу управления — цифровые и аналоговые. Цифровые срабатывают быстрее и работают стабильнее.
В большинстве серводвигателей используются одинаковые сигналы управления, а именно период сигнала — 20 мс, а длительность управляющего импульса зависит от угла, на который нужно повернуть вал, например, 544 мкс – 0°, 2400 мкс – 180°.
Реже может быть и другая длина сигналов для разных углов, например, 760 и 1520 мкс для 0° и 180° соответственно. Поэтому при использовании не знакомых вам сервоприводов уточняйте длину управляющих сигналов в технической документации.
Перейдём к практике
В наборе, который мы с вами распаковывали ранее мне достался сервопривод Tower Pro SG90 — это одна из популярнейших моделей для хобби, поэтому китайцы кладут их во все подобные наборы. Отдельно он стоит 3-4 доллара.
В комплекте с ним есть набор креплений для соединения с механизмами: четырёхсторонний (в виде +), двухсторонний (в виде —) один односторонний, что вы можете наблюдать на фото выше. Кроме них в комплект всегда кладут крепежные винтики. На валу есть шлицы для крепления оснастки, чтобы она не проворачивалась.
Сегодня нам понадобится:
- Сервопривод SG90 — 1 штука;
- Плата Arduino, любая, у меня есть UNO — 1 штука;
- Перемычки или провода для содинения — 5-10 штук;
- Потенциометр, например, на 10К (на самом деле его сопротивление не слишком важно) — 1 штука.
Если вы будете питать серву напрямую от платы, то подключайте её к пинам 5V красным проводом, GND – коричневым (черным) проводом, а жёлтый провод — это сигнал, его можно к любому пину, хоть цифровому, хоть аналоговому, хоть с ШИМ, хоть без него.
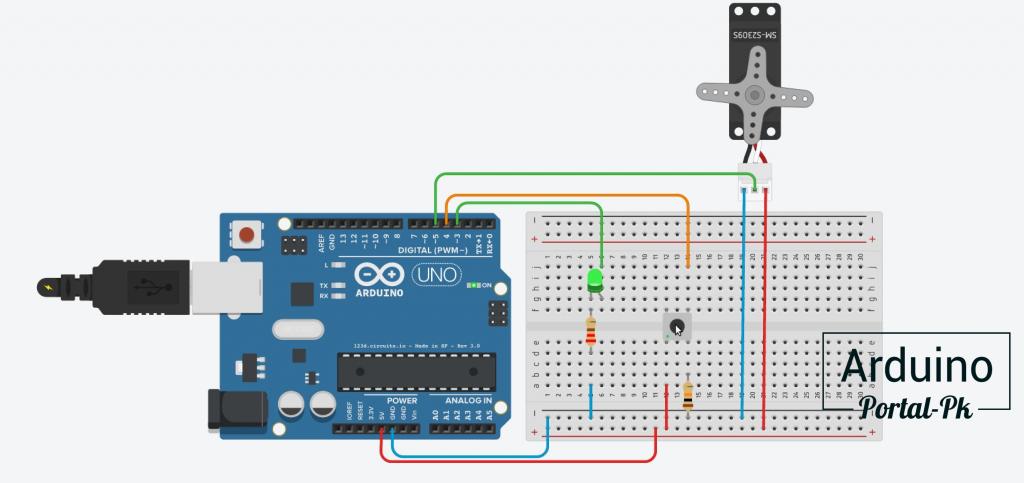
Я же заблаговременно собрал схему на макетной плате и подключил к ней потенциометр, которым мы далее будем задавать положение вала. Средний вывод потенциометра я подключил к аналоговому пину A0 ардуино, а сигнальный провод сервопривода – к 9 пину. Схему приведу ниже.
По умолчанию в этом примере выставлено, что сигнальный провод подключается к 9-му пину, если вы подключили к другому – исправьте вот это значение в коде:
Код несложный, привожу его ниже с русскими комментариями.
// Можно создать до 12 таких объектов и подключить столько же приводов
//для объекта myservo подключен к 9 пину
// чтобы привод повернулся на угол, указанный в pos
В результате сервопривод вращается от одного крайнего положения до другого. Скорость перемещения можно изменять либо путем изменения задержки между шагами (delay), либо путем изменения шага, а именно правкой последнего значения в аргументах цикла — for (pos = 180; pos >= 0; pos -= 1). На видео я показал примеры с разными значениями задержки.
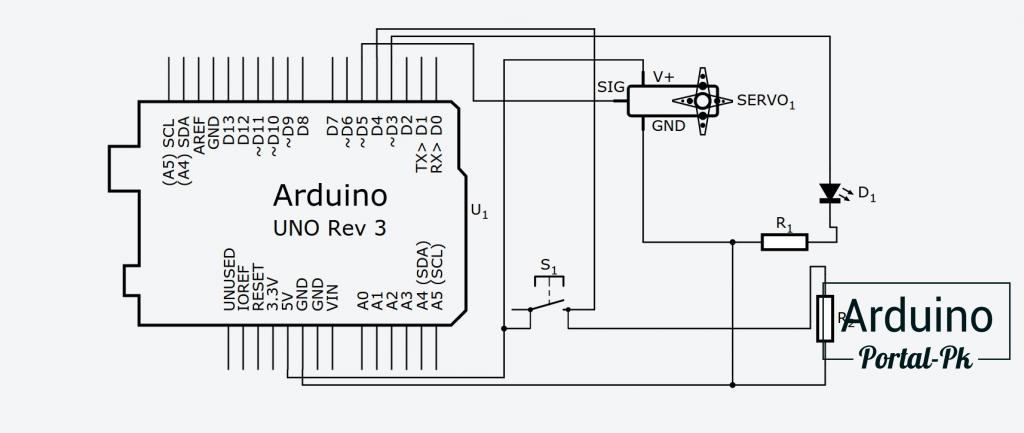
Дальше мы откроем другой из стандартных примеров — knob. Здесь-то нам и понадобится потенциометр. Ниже приведена схема подключения для этого примера.
Разберем код. Первая его часть, где подключается библиотека и назначается пин, к которому подключен управляющий провод сервопривода не изменилась, и её я комментировать не буду.
// к которому подключено потенциометр (пин А0)
// до необходимых нам градусов — от 0 до 180
// значениями, полученными с аналогового входа
Библиотека Servo.h по умолчанию встроена в Arduino IDE, разберем основные её команды:
Если у вашего привода длины управляющих импульсов отличаются от стандартных 544 и 2400 мкс, то их можно задать через запятую после номера пина, вот так servo.attach(pin, min, max), где servo – имя привода (имя переменной типа Servo), min – длина сигнала для минимального угла поворота (0°) в микросекундах, max – ширина импульса управляющего сигнала для максимального угла поворота (180°) в микросекундах.
write() — передаём приводу угол поворота в градусах (пример: ИмяПривода.write(180))
writeMicroseconds() — тоже самое, только указывает на длину сигнала в микросекундах.
read() — определяет текущее положение вала;
attached() — Проверяет подключена ли переменная типа Servo к пину с сервоприводом. Синтаксис — Servo.attached().
detach() — отмена команды attach, то есть отсоединяет определенный переменной типа Servo сервопривод от выхода.
Заключение
При достижении заданного градуса сервопривод останавливается и гудит, так как груз его немного тянет вперед или назад, вопрос как сделать чтоб серва при достижении заданного градуса останавливался на время? Например стать на 110 градусов, выключится, подождать 10мин, включится, стать на 140 градусов, выключится, подождать 10мин, включится, итд. Два дня себе голову ломаю.
[Pawn] Остановка на конечной точке, или остановка поворота при достижении заданного угла
Всем здравствуйте. У меня такой вопрос, реализация, по возможности более просто, остановка на.
Температура 22 градуса при старте системы!
При загрузки системы (я её с 5 раза смог запустить, Disk Read Error говорила) температура жесткого.
ОК, но как реализовать отключение питания от сервы? на данный момент я вижу только при помощи реле, может есть другой способ?
При достижении заданного градуса сервопривод останавливается и гудит, так как груз его немного тянет вперед или назад, вопрос как сделать чтоб серва при достижении заданного градуса останавливался на время?
как ты хочешь чтобы она остановилась? груз то ведь не даст ей стоять?
вот она и гудит, отрабатывает положение
у меня груз плюс минус уравновешен, но может немного отклонится и стать на свою позицию при этом серв гудит и пытается поставить под четко заданный градус
Как вариант, использовать электромагнитный тормоз.
Подали напряжение – тормоз отпустился, провернули ячейку, сняли напряжение с тормоза, отключили серву.
это инкубатор внутри которого стоит уравновешенная ячейка к которой прямым приводом подключен сервопривод и вертит ее как пропеллер то в зад то в перед
Я поставил серву и она у меня двигается в таких градусах начальное 110* потом 140* опять в 110* потом 80* и опять в 110*, полного оборота нет. Или я тебя как то не так понял?
это вас пока понять сложновато.
для поставленной задачи как вам указали - есть привода с тормозом.
включили привод - подали на тормоз напряжение - провернули на сколько надо - сняли напряжение с тормоза - выключили серво.
а дальше хоть "чичердык" танцуй этим приводом
Вобщем разобрался я помогло мне реле, но уперся в код, мне нужно поворачивать серву каждые два часа, а delay ругается что задал много времени, помогите с кодом пожалуйста.
Для наглядности изобразил на рисунке суть затеи, есть ящик в нем установлена ячейка которая поворачивается под действием сервопривода, ячейка примерно уравновешена ее можно вручную повернуть под любой градус и она с небольшим отклонением остановится(собственно почему и гудит сервопривод). Мне нужно чтоб ячейку вертел сервопривод каждые 2 часа, помогите пожалуйста, может у кого есть идеи, я просто еще нуб и уже очень устал над этим думать но хочу довести до ума и чемунибуть научится. Еще было бы не плохо замедлить движение сервы. Зарание благодарю!
delay отрабатывает доли секунды. Вам нужно десятки минут. Для этого нужно "внешнее" устройство - "Часы реального времени". Можно на год вперед запрограммировать.
Что бы замедлить движение сервы, то в Вашем случае лучше использовать редуктор. Убьете двух зайцев. И вращение медленнее и нагрузка на моторчик меньше. И гудеть перестанет и тормоз может не понадобится.

Сервопривод – это привод, вал которого может встать в заданное положение или поддерживать заданную скорость вращения. Другими словами, валом сервопривода можно управлять, например, задавая ему положение в градусах или определенную частоту вращения.
Сервоприводы используются в самых разных областях, например, в робототехнике они помогают моделировать различные движения роботов. Сервоприводы – эффективное решение для перемещения механизмов в пространстве.
В этом уроке мы научимся управлять сервоприводом.
Для урока нам понадобиться:
- Arduino UNO или Arduino Nano
- Плата макетная беспаечная
- Резистор 220 ОМ
- Соединительные провода папа-папа
- Светодиод 3 или 5 мм.
- Кнопка
- Servo (сервопривод)
Подключение сервопривода к Arduino.
Для достижения самых разных целей робототехники к программируемому контроллеру Arduino может быть подключен сервопривод. Подключение осуществляется через кабели, которые выходят из сервопривода. Обычно это три кабеля: красный; коричневый или черный; желтый, оранжевый или белый.
Подключение сервопривода к плате Arduino производится через ШИМ-выводы. Что Такое PWM (ШИМ) мы уже рассматривали в уроке: Плавное включение светодиода на Arduino с помощью ШИМ (PWM)
За основу возьмем урок Подключение кнопки и светодиода плате Arduino к схеме добавим сервопривод и вот что у нас должно получиться.
Изменим код:
Мы еще не работали с библиотеками. Библиотека это класс, содержащий функции которые мы можем использовать в нашей программе. Библиотека позволяет сократить объем написанного кода и скорость разработки приложения.
Ка вы поняли строка выше подключает нашу библиотеку Servo.h, после чего мы можем использовать все функции данной библиотеки.
Объявлением переменную, она нам понадобиться для работы с библиотекой.
Функция библиотеки Servo.
С помощью данной функции мы можем повернуть сервопривод на заданный угол.

Из этой статьи вы узнаете, как управлять углом поворота сервопривода при помощи потенциометра.
Что вам понадобится:
1) Ардуино (любая)
2) Макетная плата
3) Соединительные провода
5) Потенциометр (вполне подойдет на 10кОм)
Подключение потенциометра


1) Подсоедините отрицательный контакт потенциометра к шине заземления на макетной плате.
2) Подсоедините положительный контакт потенциометра к шине питания на макетной плате.
3) Подсоедините управляющий контакт потенциометра к аналоговому выводу А0 Arduino.
Подключение сервопривода


1) Подсоедините положительный провод сервопривода (обычно красный) к шине питания на макетной плате.
2) Подсоедините отрицательный провод сервопривода (обычно черный или коричневый) к шине заземления на макетной плате.
3) Подключите сигнальный провод сервопривода (обычно желтый, белый или оранжевый) к выводу PIN9 Arduino.
Подключение Ардуино
1) Подсоедините вывод 5v Ардуино к шине питания на макетной плате.
2) Подсоедините вывод GND Ардуино к шине заземления на макетной плате.
Скетч
// Управление сервоприводом с помощью потенциометра (переменного резистора)
Servo myservo; // создаем серво-объект для управления сервоприводом
int potpin = 0; // привязываем потенциометр к аналоговому выводу 0
int val; // переменная для считывания значения с аналогового вывода
Читайте также: