
Как сделать рсу
Обновлено: 04.07.2024
Стремительное развитие микропроцессорных устройств, нашедших применение в первую очередь в технических системах, изменило содержание принципов управления процессами производства. АСУТП носят характер распределенных территориально и функционально систем управления (РСУ). В качестве узловых станций в них используются промышленные ПЭВМ, программируемые контроллеры, операторские терминалы. Датчики и исполнительные устройства все чаще являются интеллектуальными, то есть осуществляют обработку и преобразование информации в цифровой сигнал в месте их установки.
Распределенные системы управления (РСУ)
Информация в РСУ, как правило, передается по цифровым сетям.
РСУ – система, состоящая из множества устройств, разнесенных в пространстве, каждое из которых не зависит от остальных, но взаимодействует с ними для выполнения общей задачи.
РСУ имеет ряд преимуществ перед сосредоточенной: больше быстродействие благодаря распределению задач между параллельно работающими устройствами, повышенную надежность, улучшенную помехоустойчивость благодаря уменьшению длины линий передачи аналоговых сигналов, меньший объем кабельной продукции.
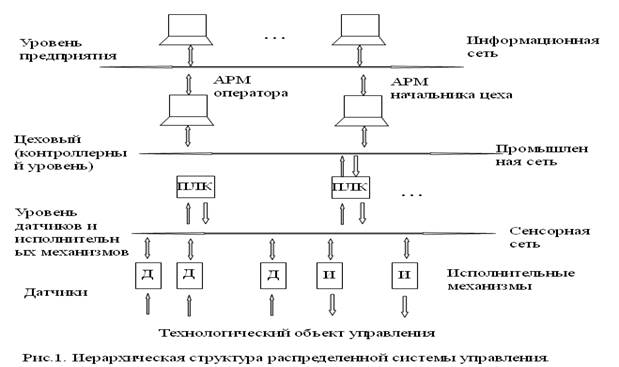
Анализ сложных РСУ позволяет выделить в них несколько уровней иерархии (рис. ). Нижний (полевой) уровень включает датчики и исполнительные устройства, как правило, имеющие цифровой интерфейс, позволяющий передавать информацию по цифровым сетям нижнего уровня (AS – интерфейс, HART – протокол и др.). Второй (контроллерный) уровень состоит из программируемых логических контроллеров с модулями ввода-вывода, которые обмениваются информацией по промышленной сети (Fieldbus). На этом уровне могут использоваться ПЭВМ. Оператор процесса наблюдает за его ходом и осуществляет управление с помощью мнемосхемы на мониторе ПЭВМ (на базе SCADA-системы).
Программно–технический комплекс – основа построения РСУ
Развитие современных МП-средств автоматизации и передачи данных дает возможность подходить к построению РСУ комплексно, то есть во многих случаях создавать системы на базе современных схемотехнических решений, технологий системного программирования и дружественных интерфейсов, как для эксплуатационного персонала, так и для участников разработки и проектирования АСУТП.
Таким требованиям отвечают программно-технические комплексы (ПТК), создаваемые рядом фирм (см. главу ).
В состав ПТК входит:
1.Семейство современных микропроцессорных контроллеров (ПЛК) различной информационной мощности – от малоканальных регуляторов до ПЛК, обрабатывающих более 1000 входных и выходных сигналов.
3.Цифровые сети передачи данных на всех уровнях РСУ, включая сетевое оборудование.
4.Системное программное обеспечение, в том числе операционные системы компьютеров, программное обеспечение ПЛК.
Структура распределенной системы управления
Современное промышленное предприятие невозможно представить без систем автоматизации. Совершенствование этих систем ведет к улучшению качества продукции, уменьшению энергопотребления, минимизации материальных затрат, повышению уровня безопасности и сокращению загрязнения окружающей среды.
С увеличением территории, на которой расположен управляемый объект (а, следовательно, и АСУ), с ростом числа датчиков получения информации об объекте и усложнением алгоритмов управления становится более эффективным применение распределенных систем.
Современные системы управления построены на представлении информации о процессе, передаче и обработке этой информации в цифровом виде. Таким образом, основными элементами АСУ являются:
· компьютеры, на базе которых организованы автоматизированные рабочие места персонала; программируемые логические контроллеры (ПЛК), осуществляющие процесс управления.
АРМ руководителей предприятия.
На рис. 1 представлена структура многоуровневой распределенной системы управления. Она является иерархической, то есть нижние уровни подчиняются вышестоящим. Она является распределенной, так как состоит из многих компьютеров и ПЛК, между которыми распределены функции сбора, обработки данных и управления.
Автоматические регуляторы
Автоматический регулятор на входе имеет информацию о текущем и заданном значениях регулируемой величины. Он выполняет следующие функции: вычисление отклонения, т.е. разности между текущим и заданным значениями регулируемой величины; вычисление в зависимости от отклонения управляющего воздействия в соответствии с законом регулирования.
Автоматические регуляторы классифицируются в зависимости от регулируемого параметра, используемой энергии, характера изменения регулирующего воздействия.
Современные регуляторы, как правило, являются универсальными. На их входы подается информация о любой измеряемой величине, преобразованной в унифицированный сигнал. Таким образом, выходной сигнал регулятора не зависит от того, какова регулируемая величина-температура, давление и т.д., однако в некоторых случаях выпускаются промышленные регуляторы для конкретной технологической величины, например, температуры.
В зависимости от источника используемой энергии автоматические регуляторы подразделяются на регуляторы прямого и непрямого действия.
В регуляторах прямого действия одновременно с изменением регулируемой величины от объекта отбирается часть энергии, которая используется для работы регулятора и воздействия на его исполнительный механизм и регулирующий орган объекта. Таким образом, к регулятору энергия извне не подводится.
К регуляторам непрямого действия извне подводится энергия для работы самого регулятора и воздействия на исполнительный механизм.
По характеру изменения регулирующего воздействия автоматические регуляторы подразделяются на линейные и нелинейные.
Линейные регуляторы формируют свой выходной сигнал (регулирующее воздействие) в соответствии с одним из линейных законов регулирования: П- пропорциональный, ПИ - пропорционально-интегральный, ПИД – пропорционально-, интегрально - дифференциальный.
ПИД - регулирование
В общем случае автоматическое поддержание заданного значения (уставки) регулируемой величины происходит в соответствии со схемой показанной на рис.
Рис Схема замкнутой системы регулирования.
В настоящее время подавляющее большинство автоматических регуляторов является цифровыми. Выходной сигнал в них рассчитывается по формуле:
Где: Xp - полоса пропорциональности в пределах которой справедлив П - закон;
T g - постоянная времени дифференцирования;
Δ E i - разность между двумя соседними измерениями E i и E i-1;
Δ t изм - время между двумя соседними измерениями Тi и Тi-1;
t n - постоянная времени интегрирования;
ΣE i - накопленная в i-й момент времени сумма рассогласований (интегральная сумма);
Выходные устройства ПИД регулятора могут быть:
· ключевого типа (см. описание работы двухпозиционного регулятора);
· аналогового типа - цифроаналоговый преобразователь, который формирует аналоговый сигнал, так называемую токовую петлю 4-20 мА (пропорциональный выходному сигнальному ре Yi) .
Если выходное устройство ключевого типа - выходной сигнал преобразуется в последовательность управляющих импульсов длительностью D (см. рис. )
Где: D - длительность импульса, с;
Tсл - период следования импульсов, с;
Y- выходной сигнал регулятора;
Рис Перемещение по (в) регулятором с импульсным выходом совместно с исполнительным механизмом постоянной скорости при различных движений импульса (а, б)
Как видно из рис , при одном переходе Тсл длительность импульса определяется значением выходного сигнала У. Эти импульсы Д передаются на исполнительное устройство регулятора. Такое преобразование выходного сигнала для управления называется шикарно-импульсной модуляции(ШИМ). Выходное устройство ключевого типа включает исполнительный механизм постоянной скорости (ИМПС) на время Д, с. Результирующее перемещение регулирующего органа объекта с помощью ИМПС показанной на рис .
Регулирующий клапан имеет электропривод (электродвигатель ИМа) и две пары контактов для управления направлением его вращения.
Рис Регулятор с выключенными реле (а) и графики регулируемой величины с состояние реле (б).
На рис. а показана связь выходных реле регулятора с электродвигателем ИМа. На рис. б приведен график изменения регулируемой величины относительно Tуст и соответствующие импульсы D управления клапаном. При Т Tуст – на закрытие. Из рис. ясно, что чем больше Т-Tуст , тем больше длительность импульса (ШИМ).
Как видно из рис., при одном периоде Tсл длительность импульса определяется значением выходного сигнала Y. Эти импульсы D передаются на исполнительное устройство регулятора. Такое преобразование выходного сигнала для управления называется, широко-импульсной модуляцией (ШИМ). Выходное устройство ключевого типа включает исполнительный механизм постоянной скорости (ИМПС) на время D, с.
Результирующее перемещение регулирующего органа объекта с помощью ИМПС показано на рис.
Введение
Стремительное развитие микропроцессорных устройств, нашедших применение в первую очередь в технических системах, изменило содержание принципов управления процессами производства. АСУТП носят характер распределенных территориально и функционально систем управления (РСУ). В качестве узловых станций в них используются промышленные ПЭВМ, программируемые контроллеры, операторские терминалы. Датчики и исполнительные устройства все чаще являются интеллектуальными, то есть осуществляют обработку и преобразование информации в цифровой сигнал в месте их установки.
Распределенные системы управления (РСУ)
Информация в РСУ, как правило, передается по цифровым сетям.
РСУ – система, состоящая из множества устройств, разнесенных в пространстве, каждое из которых не зависит от остальных, но взаимодействует с ними для выполнения общей задачи.
РСУ имеет ряд преимуществ перед сосредоточенной: больше быстродействие благодаря распределению задач между параллельно работающими устройствами, повышенную надежность, улучшенную помехоустойчивость благодаря уменьшению длины линий передачи аналоговых сигналов, меньший объем кабельной продукции.
Анализ сложных РСУ позволяет выделить в них несколько уровней иерархии (рис. ). Нижний (полевой) уровень включает датчики и исполнительные устройства, как правило, имеющие цифровой интерфейс, позволяющий передавать информацию по цифровым сетям нижнего уровня (AS – интерфейс, HART – протокол и др.). Второй (контроллерный) уровень состоит из программируемых логических контроллеров с модулями ввода-вывода, которые обмениваются информацией по промышленной сети (Fieldbus). На этом уровне могут использоваться ПЭВМ. Оператор процесса наблюдает за его ходом и осуществляет управление с помощью мнемосхемы на мониторе ПЭВМ (на базе SCADA-системы).
Вычисление РСУ производится на основании критериев, характерных для соответствующих типов конечных элементов – стержней, диафрагм, плит, оболочек, массивных тел. Для всех типов элементов РСУ выбираются по критерию наибольших напряжений, рассматриваются отдельные критерии, учитывающие, например, особенности работы железобетона. Так для стержней, находятся сочетания с максимальной растягивающей и сжимающей продольной силой.
При расчете учитываются требования нормативных документов и логические связи между загружениями, накладываемые нормативными документами или существом решаемой задачи.
Введено понятие взаимоисключающих загружений, то- есть таких, которые в одно сочетание одновременно входить не могут. Так, например, активное ветровое воздействие на сооружение одновременно с двух (трех, четырех) сторон учитывать не следует. Все эти ветровые воздействия можно включить в одну группу взаимоисключающих загружений.
Понятие сопутствующих загружений введено для того, чтобы загружение сопутствующее, то есть порожденное основным, не включалось бы в РСУ без основного. Так, например, усилия от торможения тележки крана не могут включаться в РСУ, если туда не вошли усилия от давления колес крана. Нагрузка же от крана может действовать и без сочетания с тормозной. Имеется возможность ограничить и число одновременно учитываемых в РСУ воздействий от крановых и тормозных нагрузок, что вытекает из требования соответствующих норм.
Понятие объединенно-кратковременных нагрузок введено для того, чтобы дать возможность включать в основное сочетание не одну из кратковременных нагрузок, а их группу (либо наиболее опасную по прочности комбинацию нагрузок из этой группы). При назначении коэффициентов сочетания, зависящего от числа действующих нагрузок, эта группа засчитывается как одна временная нагрузка от одного источника или как нагрузка от нескольких источников, совместное действие которых учтено при определении значения нагрузок (например, гололедно-ветровая нагрузка).
Нормами проектирования предусмотрено, что некоторые виды нагрузок в некоторых сочетаниях не должны учитываться полностью. Поэтому произведена классификация по видам загружений (постоянная, временная, крановая и т.д.) и предоставлена возможность задавать коэффициенты, с которыми данное загружение может входить в основное и другие сочетания.
Расчетные сочетания усилий могут быть вычислены как в общем потоке расчета задачи, так и отдельно, после завершения расчета на статические и динамические воздействия. В первом случае исходные данные готовятся после завершения формирования расчетной схемы и ввода загружений, во втором – данные могут быть введены после завершения расчета по загружениям.
Подготовка исходных данных для вычисления РСУ выполняется только после задания всех загружений. Функция подготовки вызывается из Дерева проекта в разделе Специальные исходные данные, подраздел Расчетные сочетания усилий.

Рис. 11.1. Диалоговое окно
Расчетные сочетания усилий
В диалоговом окне Расчетные сочетания усилий (рис. 11.1) автоматически записываются имена всех сформированных загружений. Каждому загружению выделена одна строка таблицы, которая включает номер загружения, его имя, список для установки типа загружения и столбцы со специальной информацией, характеризующей загружение и его взамосвязь с другими загружениями. В связи с ограничением места в диалоговом окне таблица состоит из двух блоков – нижнего и верхнего, связанных общей линейкой прокрутки. При помощи этой линейки выполняется листание по строкам. По этой же причине в нижнем блоке таблицы количество видимых столбцов с коэффициентами РСУ ограничено тремя. Для доступа к остальным столбцам с коэффициентами используются кнопки [ >].
используя списки типов загружений, установленные в каждой строке, назначить всем загружениям их тип; по мере назначения типа в таблицу автоматически заносятся коэффициенты РСУ, принятые по умолчанию;
заполнить последовательно для каждого загружения столбцы с параметрами;
заменить в случае необходимости значения коэффициентов на требуемые по условиям решения задачи;
нажать кнопку Список элементов и назначить элементы или группы, для которых выполняется расчет (по умолчанию расчет выполняется для всех элементов расчетной схемы);
если предполагается выполнение унификации и/или создание групп унификации, то вызвать одноименные диалоговые окна, нажав соответственно кнопки Унификация и Группы.
Если в столбце Объединение кратковременных загружений (к ним относятся загружения, помеченные как временное длительно действующее, кратковременное и кратковременное, длительность действия которого мала) группа загружений помечена одинаковой цифрой, то она при определенных условиях может попасть в первое основное сочетание в любой комбинации сумм этих загружений.
В столбце Знакопеременные единицей помечаются знакопеременные загружения. (практически всегда должны быть объявлены знакопеременными динамические загружения, а также тормозные нагрузки кранов).
В первом столбце Взаимоисключающие каждому загружению из группы взаимоисключающих загружений присваивается номер от 1 до 9 (т.е. может быть создано до 9 групп таких загружений). Второй столбец пока не используется.
В столбцах Сопутствующие указываются номера сопутствующих загружений, т.е. таких, действие которых обусловлено наличием данного загружения. К таким загружениям, например, относятся тормозные, которые попадут в РСУ только совместно с крановыми и в строке кранового нагружения указаны как сопутствующие ему.

Рис. 11.2. Диалоговое окно
объединение кратковременных нагрузок допускается лишь для кратковременной и кратковременной с малой длительностью действия нагрузок;
не все виды нагрузок могут быть объявлены сопутствующими
тормозная нагрузка может сопутствовать только крановой;
двойное сопутствие не допускается;
для постоянных загружений f = 1.1;
для временного загружения f = 1.2;
для особых воздействий f = 1.0;
для кратковременных с малой длительностью f = 1.4.
для постоянных и длительно действующих загружений Кg = 1;
для крановых Кg = 0.6;
для прочих Кg = 0.0.
столбец (1) – первое основное сочетание: для всех видов загружений, кроме особых, К1=1 (для особых К1=0);
столбец (2) – второе основное сочетание: для постоянных К2=1; длительно действующих К2=0.95; для кратковременных, крановых и тормозных К2=0.9; для особых К2=0;
столбец (3)– особое сочетание: для постоянных К3=0.9; для длительно действующих К3=0.8; для кратковременных К3=0.5; для крановых и тормозных К3=0; для сейсмических К3=1; для прочих динамических К3=0.
В практике возможны случаи, когда для разных элементов схемы требуется применить разные коэффициенты сочетаний в одном и том же загружении. Такие элементы объединяются в группы (не путать с группами элементов, создаваемыми при формировании расчетной схемы и анализе результатов). Групп может быть две. Они формируются в диалоговом окне Группы, которое вызывается после нажатия одноименной кнопки в окне Расчетные сочетания усилий. Один и тот же элемент может входить в обе группы. Для этих групп в таблице формируют дополнительные столбцы (с 4-го по 15-й) коэффициентов РСУ.
номера элементов вводятся через пробел;
в случае подряд пронумерованных элементов первый и последний элементы ряда пишутся через дефис (например: 1-23 34 45 76 87-125).
Унификация
в группе элементов сечения унифицируются таким образом, что все элементы группы имеют одинаковое сечение;
в группе элементов выполняется унификация по соответствующим сечениям, т.е. элементы группы будут иметь одинаковые первое, второе, третье и т.д. сечения;
в группе элементов унифицируются симметричные сечения, т.е. все элементы группы будут иметь одинаковые первое и последнее сечения, второе и предпоследнее и т.д.
Вычисление РСУ в случае унификации выполняется не для каждого элемента в отдельности, а для каждой группы элементов. При этом, в одну группу могут входить только те элементы, у которых одинаковая ориентация местных осей.
нажать кнопку Новый список (элементов);
выбрать тип унификации из одноименного списка;
установить номер группы унификации из списка Номер группы;
ввести список элементов или загрузить созданные ранее группы;
нажать на кнопку Сохранить.
в окне Номер списка установить номер модифицируемого списка;
внести изменения в характеристики списка;
запомнить изменения, нажав кнопку Сохранить.

Рис. 11.3. Диалоговое окно Унификация
Группы
Если часть элементов имеет разные коэффициенты РСУ, то для их задания используется диалоговое окно Группы (рис. 11.4).
Порядок работы в этом окне в основном совпадает с описанным выше для окна Унификация – нажать кнопку Новый список, ввести номера элементов, назначить номера столбцов, из которых выбираются коэффициенты РСУ, и нажать кнопку Сохранить.
В таблице, помещенной в нижней части окна, отмечаются номера столбцов, из которых следует взять коэффициенты РСУ для текущей группы элементов. Напомним, что эти коэффициенты задаются в столбцах 1 15 таблицы в диалоговом окне Расчетные сочетания усилий (см. рис. 11.1).

Удаление всей информации, введенной в режиме задания расчетных сочетаний усилий, выполняется кнопкой Удаление РСУ (это соответствует отказу от вычисления РСУ).
РСУ/DCS - суть явления
Автор не исключает того, что нижеизложенный текст является графоманией. Любая критика приветствуется.
При этом, применение ПЛК любых производителей для локального управления отдельно взятой установкой – абсолютно нормальная практика. Особенно с учетом того что цикл опроса у DCS как правило близок к 1 секунде, и быстротекущие процессы она контролировать не может по определению. Этого от РСУ и не требуется, в подобных случаях процессом управляет быстродействующий ПЛК у которого цикл опроса запросто может составлять 10 мс, а уставки для него будут формироваться в РСУ в режиме каскадного управления.
Существуют как истинно распределенные РСУ, так вполне себе централизованные, для которых DCS была скорее неохваченной частью рынка, нежели архитектурой. Первые, зародились гораздо раньше и обрели распределенную архитектуру вынужденно. Когда потребность в синхронизации работы всего оборудования предприятия возникла, а технические возможности были ограничены. Напомню, мы говорим о крупных производствах, на которых работа последующего технологического участка зависит от предыдущего, для локальной установки достаточно обычного ПЛК.
Вместо этого, организовали горизонтальное взаимодействие, когда программа, исполняемая на одном контроллере, если это было необходимо, могла свободно оперировать данными с любого другого, да и разные элементы самой программы могли выполняться на разных контроллерах. Быстродействие существующих (на тот момент) сетей удовлетворяло требованиям такой архитектуры, которая к тому же не подразумевала единой точки отказа, что значительно повышало отказоустойчивость в сравнении с централизованной. (Тут стоит заметить, что единой точки отказа не будет только в том случае, когда помимо установок, выполняющих цепочку последовательных операций, каждая установка (вместе с управляющим контроллером) продублирована аналогичными работающими параллельно! Что для крупного предприятия норма, т.к. основное оборудование всегда дублируется на случай отказа.)
Вторые же, появились в эпоху высокоскоростных сетей, быстрых процессоров и недорогой памяти, и технических причин отказываться от централизованной архитектуры у их производителей не было. Зато, как правило, в их арсенале уже имелись готовые ПЛК и SCADA. И если в DCS истинно распределенного типа, программа управления может быть распределена между несколькими контроллерами, то в централизованных контроллеры выступают в роли удаленного ввода-вывода, а управляющая программа выполняется на сервере. Это создает единую точку отказа, но применение современных средств резервирования (RAID-ы, резервные серверы и каналы связи, и т.д.) снижает вероятность отказа, а удобство управления системой из-за наличия централизованной архитектуры заметно выше по сравнению с истинно распределенной.
Примерами такого подхода, когда на базе имеющихся ПЛК и SCADA создавались централизованные DCS могут послужить Siemens PCS7 и Rockwell PlantPAx. В первом случае были объединены возможности SCADA WinCC и ПЛК серии S7-400 (т.к. вычислительные мощности контроллеров предыдущих серий недостаточны для использования в составе DCS), а во втором SCADA Factory Talk View и ПЛК ControlLogix. РСУ Aprol от B&R так же централизованная, но изначально создавалась не как SCADA, а как программная DSC на базе существующих ПЛК B&R.
Одной из актуальных задач в области систем управления является разработка программного обеспечения для распределенных отказоустойчивых систем управления. Существующие в этой области на сегодняшний день решения являются проприетарными, как следствие, дорогостоящими и не всегда эффективными
Эти решения не предусматривают эффективного использования ресурсов резервирующих баз, технической и программной, что негативно сказывается как на отказоустойчивости, так и на масштабируемости таких решений. При нарушении архитектуры сети отсутствует возможность динамического реконфигурирования как процессов обработки информации, так и передачи потоков данных (как управляющих, так и информационных). Использование специфических микроконтроллеров, применение DCS/SCADA усложняет разработку и поддержку систем, расширение их функционала.
Архитектура распределенной системы управления
Обобщенная типовая архитектура распределенной системы управления (РСУ) включает в себя три иерархически связанных уровня: операторский уровень, уровень управления и уровень ввода-вывода (см. рис.1) [1].
Рисунок 1. Обобщенная типовая архитектура распределенной системы управления (РСУ)
Основной задачей операторского уровня является предоставление человеко-машинного интерфейса (ЧМИ) для обеспечения настройки и контроля функционирования всей системы. Уровень управления отвечает за получение и обработку данных с датчиков, передачу данных на операторский уровень и выработку управляющих воздействий на исполнительные устройства. Уровень ввода-вывода представляет собой датчики и исполнительные устройства, непосредственно связанные с объектом управления.
Задача программного обеспечения, в рамках обобщенной архитектуры РСУ, состоит в обеспечении функционирования операторского уровня и его связи с уровнем управления системы. Следовательно, основополагающим уровнем при проектировании ПО и решении вопросов его взаимодействия с аппаратным обеспечением является операторский. Программное обеспечение должно максимально эффективно использовать доступные аппаратные ресурсы системы и при этом обладать максимальной независимостью от внутренней архитектуры аппаратного обеспечения.
Аппаратное обеспечение предоставляет вычислительные ресурсы, память и среды передачи данных между узлами в системе. При проектировании общей архитектуры системы не рассматриваются конкретные узлы уровня ввода-вывода, которые будут к ней подключены при конкретной ее реализации, следовательно, в обобщенной архитектуре рассматриваются операторский уровень и уровень управления. Аппаратное обеспечение должно быть распространенным, соответствовать современным стандартам, иметь все необходимые для реализации архитектуры свойства и возможности.
Требования к РСУ
Требования к РСУ относятся не только к системе в целом, но и к ее аппаратной и программной составляющим по отдельности, так как конкретные подходы к удовлетворению данных требований для этих составляющих могут принципиально различаться. РСУ должна быть в первую очередь отказоустойчивой. Простейшим методом повышения отказоустойчивости является резервирование (дублирование) функциональных узлов или их совокупности. Вторым важным свойством является масштабируемость. Масштабируемость основывается на реализации специальных алгоритмов в ПО и аппаратной возможности замены и добавления новых узлов или их составных частей. При этом система должна оставаться простой для ее эксплуатации, разработки новых узлов или модулей и модификации ее архитектуры.
Обзор архитектур РСУ
Для проведения обзора архитектур РСУ были выбраны РСУ Siemens SIMATIC PCS 7 как одна из самых востребованных на рынке и RTS S3 как РСУ, реализованная на базе ОСРВ QNX.
Siemens SIMATIC PCS 7
Архитектура системы имеет все свойства обобщенной архитектуры РСУ [2]. В качестве операторских станций выступают компьютеры на базе процессорной архитектуры x86 с ОС Windows и пакетом Siemens WinCC, предоставляющим ЧМИ. Имеются серверы с базами данных. Станции операторов, инженерные станции и серверы связаны локальной сетью на основе Ethernet. Операторский уровень связан с уровнем управления зарезервированной сетью Industrial Ethernet. На уровне управления находятся программируемые логические контроллеры (ПЛК) с возможностью резервирования за счет дублирования функционала. Имеется возможность подключаться к внешним системам и сетям и организовать удаленный доступ к системе.
Данная архитектура аналогично состоит из уровней обобщенной структуры РСУ [3]. Операторские станции основаны на той же аппаратной платформе, что и в РСУ SIMATIC, но могут находиться под управлением как ОС Windows, так и Linux. Инженерные станции объединены с операторскими. Системой предоставляется единая среда разработки приложений. Сеть Ethernet соединяет узлы внутри операторского уровня и сам операторский уровень с уровнем управления с использованием стека протоколов TCP/IP. На уровне управления находятся промышленные компьютеры под управлением ОС QNX с собственной базой данных и возможностью резервирования путем дублирования функционала узла.
Недостатки описанных систем
В описанных выше системах для операторского уровня и уровня управления используется разная аппаратно-программная платформа. В пределах операторского уровня возможно использование только одной процессорной архитектуры, а для настройки и разработки уровня управления требуется специальная инженерная станция. Данные РСУ предлагают в качестве способа повышения отказоустойчивости только аппаратное резервирование с дублированием функционала резервируемого узла, что является нерациональным использованием резервирующего аппаратного обеспечения.
Характеристики и функциональные особенности системы L-Net
При разработке системы L-Net ставилась задача создать такую систему управления, которая будет обладать нижеперечисленными характеристиками:
- Динамическая реконфигурация с полным восстановлением работоспособности с минимальными потерями в случае отказа хоста или нарушения топологии сети.
- Эффективное распределение задач по имеющимся работоспособным узлам сети.
- Дублирование каналов связи между узлами с динамической реконфигурацией потоков передачи данных.
- Легкость эксплуатации и масштабирования системы.
- Переносимость и работоспособность системы на любой аппаратной платформе, предназначенной для построения систем управления и встраиваемых систем.
Для построения системы с вышеописанными характеристиками требуется операционная система, предназначенная преимущественно для создания систем управления и встраиваемых систем. Анализ существующих операционных систем показал, что наиболее подходящей операционной системой является ОС QNX 6 (Neutrino), которая обладает весьма эффективными ресурсораспределяющими и сетевыми возможностями [4]. Широкие сетевые возможности обеспечиваются сетевым протоколом Qnet. Он решает задачу надежности и динамической балансировки нагрузки каналов связи, но при этом не решаются проблемы отказоустойчивости системы в целом [5]. В результате была разработана инновационная система управления, основанная на распределенной реконфигурируемой многоконвейерной вычислительной среде. Разработанная система имеет одноранговую архитектуру, включающую три логических блока: блок ввода-вывода, блок коммутаторов общего назначения и блок реконфигурируемой вычислительной среды (РВС) (см. рис.2).
Рисунок 2. Архитектура распределенной системы управления на основе реконфигурируемой многоконвейерной вычислительной среды L-Net
Основными преимуществами данной архитектуры являются:
- Одноранговый тип
- Децентрализованность
- Масштабируемость
- Пространственная распределенность
Функциональные особенности данной архитектуры:
На первом уровне архитектуры находится блок ввода-вывода (I/O), включающий в себя: узлы ввода-вывода, коммутатор узлов ввода-вывода, интерфейс ввода-вывода, датчики и исполнительные устройства. Блок отвечает за базовые механизмы формирования управляющих воздействий на основании данных с локальных датчиков и данных, полученных от других уровней системы управления. Поставленные задачи распределяются между работоспособными узлами ввода-вывода на основании их текущей относительной производительности или вручную оператором. Датчики и исполнительные устройства подключены с помощью шины ко всем узлам ввода-вывода в блоке, что позволяет любому узлу опрашивать любой датчик или вырабатывать воздействие на любое исполнительное устройство. Коммутатор узлов ввода-вывода обеспечивает связь между всеми узлами ввода-вывода для обмена данными между ними и другими уровнями архитектуры системы для получения управляющих и информационных данных. При наличии соответствующих аппаратных возможностей узлы связываются между собой и с узлами и коммутаторами на других уровнях системы непосредственно, что уменьшает время реакции в сети. Прямая связь между узлами и определенная загруженность узлов в текущем режиме работы блока ввода-вывода позволяет организовывать в блоке конвейерные вычисления, необходимые для функционирования этого блока без обращения к внешним вычислительным мощностям системы управления (РВС), что позволяет эффективно использовать свободные ресурсы, предоставленные для резервирования узлов блока ввода-вывода на момент отказа.
Блок коммутаторов общего назначения, находящийся на втором уровне архитектуры, организовывает линии связи между блоками ввода-вывода и РВС и внешними системами. Каждый коммутатор может соединять между собой различные узы и коммутаторы во всей системе управления. Количество линий связи определяется аппаратными возможностями входящих в состав блоков узлов и коммутаторов. Так как сеть Qnet позволяет динамически распределять потоки передачи данных, масштабирование этого блока осуществляется простым подключением новых устройств и не требует настройки, а при выходе из строя одного из коммутаторов передача данных между узлами не будет прервана, если другой коммутатор обеспечивает аналогичную связь между узлами или они связаны напрямую. При этом необходимо позаботиться о достаточной пропускной способности сети, необходимой для резервирования вышедшего из строя коммутатора.
Блок реконфигурируемой вычислительной сети (РВС), находящийся на третьем уровне архитектуры, обеспечивает систему управления высокими вычислительными мощностями для решения сложных задач обработки информации, принятия решений, распознавания и т.д. Блок отвечает за инициализацию всей системы управления: проверка работоспособности коммутаторов и узлов, целостности сети, построение графов сети всей системы, установка стартовых параметров работы блоков ввода-вывода. Узлы этого блока предусматривают архивирование как собственных данных, так и данных с блоков ввода-вывода. Каждый узел этого блока может исполнять роль машины оператора, предназначенной для мониторинга работы системы и внесения корректировок в программы работы как этого узла, так и всех узлов системы, выполнения реконфигурации по запросу.
Одной из основных задач системы L-Net является распределение вычислительной нагрузки на узлах сети. Решение данной задачи основывается на построении вычислительных конвейеров. Для построения вычислительного конвейера предварительно строится граф задачи – схема обмена потоками данных от источника к получателю. В качестве источника выступают датчики, а в качестве получателя – исполнительные механизмы. Сам вычислительный конвейер представляет собой отображение графа задачи (см. рис.3) на граф вычислительной сети (см. рис.4) с учетом требований задачи к вычислительным ресурсам системы и текущему ее состоянию.
Рисунок 3. Граф задачи
Рисунок 4. Граф сети
Решением является использование сервиса, предоставляющего получателю исчерпывающую информацию о текущем аппаратном обеспечении, его состоянии и доступных источниках данных, выполняющего работу с графами сети и задачи. В результате повышается быстродействие за счет конвейеризации вычислений и организуется рациональное использование всех доступных системе вычислительных ресурсов.
Основной проблемой функционирования подобной системы является полное нарушение работоспособности вычислительных конвейеров при отказе любого узла этого конвейера или при нарушении передачи данных между ними. Базовыми средствами протокола Qnet достигается восстановление связей между узлами при частичном их нарушении за счет резервных линий, предусмотренных архитектурой. Система L-Net решает проблему восстановления работоспособности при полном отказе хоста вычислительной системы путем динамической реконфигурации вычислительного конвейера, т.е. использованием рабочих ресурсов для замещения сбойного блока. Система предусматривает три сценария восстановления (реконфигурации), отличающихся временем реакции на факт отказа, временем восстановления и используемыми аппаратными ресурсами: по факту отказа, с пассивной готовностью, с активной готовностью.
- Реконфигурация по факту отказа – после обнаружения отказа производятся поиск доступного аппаратного обеспечения и его включение в граф задачи.
- Реконфигурация с пассивной готовностью – резервирующее аппаратное обеспечение определяется заранее, запускается процесс, обеспечивающий реализацию вершины графа задачи на узле, устанавливаются соединения, но процесс не производит обработку данных, если не произошел отказ основного узла.
- Реконфигурация с активной готовностью – вершина графа задачи реализуется на нескольких узлах, которые параллельно выполняют обработку данных и передают результат.
В результате обеспечивается гибкая готовность системы к сбоям как на программном, так и на аппаратном уровнях, возможность изменять конфигурацию узлов без остановки работы и потери производительности при независимости от реализации сети, вычислительного конвейера и узла.
Разработанная система L-Net в отличие от существующих аналогов предполагает использование широкого спектра аппаратных характеристик узлов РСУ при полной их программной совместимости. При работе узлов под управлением одной операционной системы (QNX Neutrino) обеспечивается возможность их построения на различных процессорных архитектурах (x86, ARM, MIPS и т.д.) с разнообразными наборами интерфейсов и периферийных устройств. Реализация узлов возможна в виде настольных, промышленных ПК, носимых ПК и одноплатных компьютеров. Все составляющие комплекса программного обеспечения разрабатываемой РСУ могут быть запущены на любом ее узле с ОС QNX, при этом остается возможность использования узлов с другой операционной системой. Такой подход позволяет использовать каждый узел для решения задач как операторского уровня, так и уровня управления. Следовательно, имеется гибкая система взаимодействия между одноранговыми узлами без жесткой иерархии уровней, присущей обобщенной архитектуре РСУ и системам использующих данную архитектуру как базовую. Одноранговость сети упрощает процессы развертывания, эксплуатации, масштабирования и отладки системы.
Для реализации вычислительного потенциала резервирующего аппаратного обеспечения в разрабатываемой системе предлагаются алгоритмы динамического конфигурирования и реконфигурирования, основанные на сетевом протоколе Qnet и программном обеспечении сети L-Net. Алгоритм динамического конфигурирования основан на распределении вычислительной нагрузки по всем узлам путем конвейеризации и распараллеливания задач и динамической балансировки нагрузки на каналы передачи данных между узлами. Алгоритм реконфигурации системы предполагает наличие трех сценариев восстановления работоспособности при отказе в зависимости от имеющегося аппаратного обеспечения, приоритетов и задач, возложенных на систему: по факту отказа, с пассивной готовностью (выделение ресурсов) и с активной готовностью (использование ресурсов). Алгоритмы динамического конфигурирования и реконфигурирования позволяют повысить производительность и надежность за счет имеющихся в системе аппаратных резервов.
Немаловажным преимуществом системы является максимальная прозрачность применяемых в ней как аппаратных, так и программных технологий, что позволяет серьезно упростить техническое сопровождение системы и разработку к ней новых модулей.
Разработанные архитектурные решения позволяют повысить такие показатели распределенных систем управления, как надежность, производительность, стоимость, масштабируемость и простота за счет возможности использования широкого набора аппаратного обеспечения, реализации алгоритмов динамической конфигурации и рационального использования ресурсов системы.
Ключевые слова: распределенная система управления, информационное обеспечение систем управления, распределенные реконфигурируемые системы.
Architecture of a distributed control system based on reconfigurable multi-pipeline computing environment L-Net
Abstract. The article is devoted to a distributed control system based on reconfigurable multi-pipeline computing environment. The architecture of the system is given. Also, the basic characteristics and functional properties of the system are given too. The article presents a rationale for the choice of the operating system. The basic advantages of the system in comparison with existing similar developments are shown in the article.
Keywords: distributed control system, systems software support, distributed reconfigurable.
Читайте также: