
Как сделать робота
Обновлено: 06.07.2024
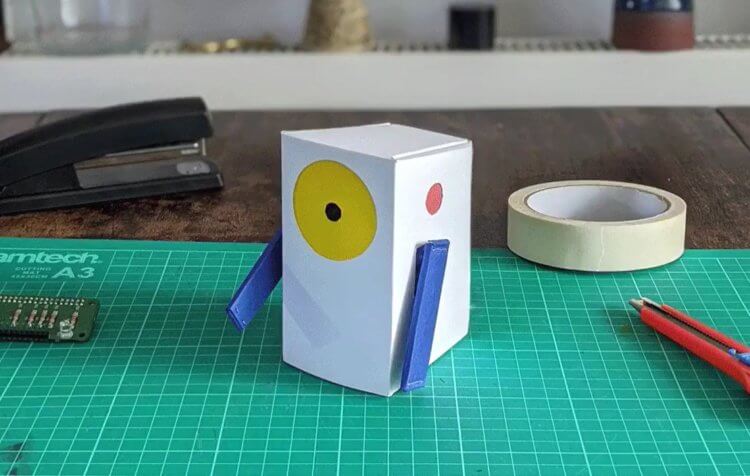
Робот ALTO, которого можно собрать самому
Робот с искусственным интеллектом своими руками
Интересный факт: ученые уверены, что в будущем большую часть ручного труда будут выполнять роботы. Чтобы не остаться без работы, людям необходимо уже сейчас изучать программирование, ведь роботами должен кто-то управлять. Так что знать, что такое машинное обучение и как оно работает, важно всем. И робот ALTO, возможно, сможет быстро ознакомить людей с этой темой.
Схема для создания корпуса робота из бумаги и исходный код программы для его работы можно найти на сайте Experiments with Google (кнопка Get the code). Но это еще не все, потому что для создания робота нужна электроника, которую нужно купить:
- Coral USB Accelerator — это устройство, которое включает в себя процессор Edge TPU. Он нужен для того, чтобы робот обладал способностью к машинному обучению. Его можно купить на Aliexpress;
- Raspberry Pi 4 — небольшой компьютер размером с банковскую карту. К нему можно будет подключить камеру, динамики и прочее оборудование, нужное для робота. Он тоже есть на Aliexpress.
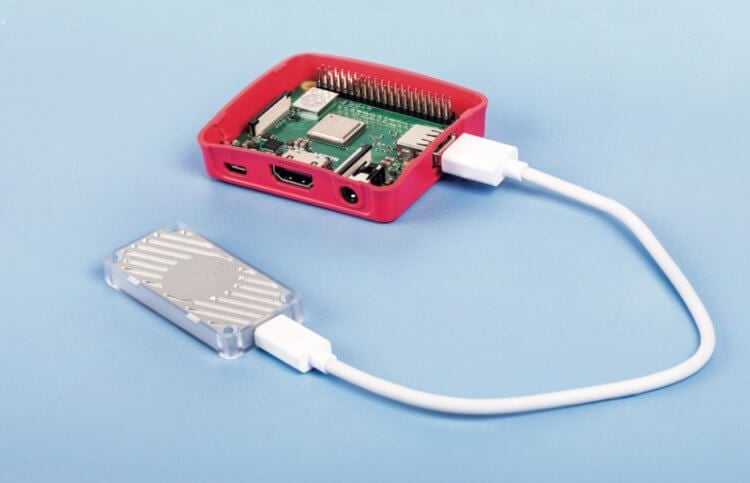
Coral USB Accelerator и Raspberry Pi 4
Знаете ли вы, что роботов можно создавать даже изо льда? Посмотреть на такого робота можно по этой ссылке.
Программирование робота
Для обучения робота нужно будет использовать платформу TensorFlow, которая включает в себя инструменты для тренировки нейронных сетей (можно сказать, для создания искусственного интеллекта). Звучит сложно, да и цена устройства Coral USB Accelerator и компьютера Raspberry Pi 4 может озадачить. Но ведь речь идет о достаточно серьезном устройстве, в ходе создания которого человек получает навыки, которые могут пригодиться ему в высокотехнологичном будущем. Знание английского тоже обязательно, потому что инструкция по сборке робота ALTO и его настройке выложены на GitHub и не переведены на русский.
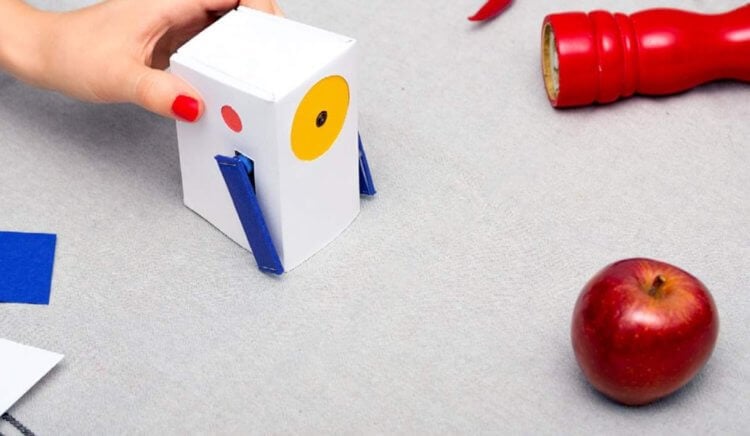
Робот ALTO может распознавать предметы и многое другое — главное, научить его этому
Представители Google считают, что робота можно научить выполнению самых разных задач. Самая простая из них — распознавание предметов. Если перед камерой робота поставить яблоко, он может поднять левую руку. А если поставить банан — правую. Это только самые банальные примеры, а на деле, полученные в ходе сборки робота знания, должны помочь в создании более навороченных устройств. Глядишь, кто-нибудь сможет даже разработать собственный робот-пылесос или создать охранную систему с распознаванием лиц.
Многие люди ассоциируют будущее именно с роботами. Считается, что когда-нибудь они смогут ходить по улицам наравне с людьми и это будет вполне привычным явлением. На данный момент на улицах можно встретить разве что роботов-курьеров, и то редко. Одного из самых интересных роботов для доставки посылок недавно представила компания Hyundai. Он стал очень обсуждаемым — в чем заключается его главная особенность, можно почитать в этом материале.
Теперь, вы выбрали все основные компоненты для сборки робота. Изготовление робота начинается со следующего шага — необходимо спроектировать и построить основание или каркас. Каркас держит их всех вместе и придает вашему роботу законченный вид и форму.

сборка робота
Создание каркаса
При этом простой каркас может быть не менее хорошим. Идеальная форма встречается редко, но некоторые проекты могут выглядеть более элегантно из-за своей простоты. Возможно другие проекты могут привлечь внимание из-за их сложности.
Материалы
Существует много материалов, которые вы можете использовать для создания основания. Вы используете все множество материалов для создания не только роботов, но и других устройств. Следовательно вы получите хорошее представление о том, что наиболее подходит для данного проекта.
Список предлагаемых строительных материалов, приведенных ниже включает только наиболее распространенные. Как только вы используете некоторые из них, вы сможете поэкспериментировать с теми, которые не входят в список, или объединить их вместе.
Использовать существующие коммерческие продукты
Оно может либо сэкономить вам много времени и денег. Хотя и может создать дополнительные хлопоты и головную боль. Есть много очень хороших примеров того, как перепрофилировать материалы и сделать из них очень хорошего робота.
Основной строительный материал
Например, изготовление робота из картона. Некоторые из самых основных строительных материалов могут быть использованы для создания отличных каркасов. Одним из самых дешевых и наиболее доступных материалов является картон. Вы часто можете найти картон бесплатно, и его можно легко вырезать, согнуть, склеить и сложить.

робот из картона
Может быть вы можете создать усиленную картонную коробку, которая выглядит намного более красиво. И она соответствует размеру вашего робота. Затем вы можете нанести эпоксидную смолу или клей, чтобы сделать ее более долговечной. В заключение дополнительно можно разукрасить ее.
Плоский материал для конструкции
Один из наиболее распространенных способов сделать раму – это использовать стандартные материалы, такие как лист фанеры, пластика или металла. И просверлить отверстия для подключения всех исполнительных механизмов и электроники. Прочный кусок фанеры может быть довольно толстым и тяжелы. В то самое время как тонкий лист металла может быть слишком гибким.
Например, доску или фанеру из плотной древесины можно легко разрезать с помощью пилы, просверлить (не опасаясь разрушения), покрасить, отшлифовать и т.д. Следовательно вы можете устанавливать устройства с двух сторон. Например, подключить двигатели и колесики колес к нижней части, а электронику и аккумулятор к верхней части. При этом древесина останется неподвижной и твердой.
Лазерная резка, изогнутый пластик или металл
Если вы находитесь на том этапе, когда вам необходим внешний блок, то лучшим вариантом будет высокоточная резка деталей лазером. Любая ошибка в расчетах будет дорогостоящей и приведет к порче материалов. Для изготовления робота нужна собственная мастерская. Возможно нужно найти компанию, производящую такой тип роботов. Может быть она предлагает множество других услуг, включая работы с металлом и покраску.
3D-печать
3D принтер, печатающий раму или каркас, редко бывает наиболее обоснованным решением (потому что он печатает послойно). В результате этого процесса можно создавать очень сложные формы. Такие формы было бы невозможно (или очень сложно) изготовить другими способами.

3D принтер
Отдельная трехмерная печатная деталь может содержать все необходимые монтажные точки для всех электрических и механических компонентов. При этом способе изготовления каркаса сохраняется незначительный вес изделия. Изготовление робота потребует дополнительной обработки и шлифовки.
Поскольку 3D-печать становится более популярной, цена на детали также снижается. Дополнительно преимуществом 3D-печати является не только то, что ваш дизайн легко воспроизводить, но и им легко делиться. При помощи нескольких кликов мышки можно получить все инструкции по дизайну и файлы САПР.
Полиморф
При комнатной температуре полиморф является твердым пластиком. При нагревании (например, в горячей воде) он становится податливым и может быть сформирован в сложные детали. Затем они охлаждаются и затвердевают в прочные пластмассовые детали.
робот из полиформа
Обычно пластиковые детали требуют высоких температур и необходимы различные формы для изготовления. Изготовление робота таким способом делает их недоступными для большинства любителей. Например, вы можете комбинировать различные формы (цилиндры, плоские листы и т.д.).
Так формируются сложные пластмассовые структуры, которые выглядят как сделанные промышленным способом. Вы также можете экспериментировать с различными формами и достичь с помощью этого материала многого.
Изготовление робота
Конструирование и изготовление робота нужно производить с учетом выбранных материалов и методов. Выполните следующие шаги, чтобы создать эстетичную, простую и структурно обоснованную раму робота меньшего размера.
- Сначала нужно сделать прототип конструкции, выполненный из бумаги, картона или металла.
- Получите все комплектующие, которые потребуются для изготовления робота (электрические и механические), и измерьте их.
- Если у вас нет всех ваших деталей под рукой, вы можете обратиться к размерам, предоставленным производителем.
- Проведите мозговой штурм и набросайте несколько разных конструкций каркаса в общих чертах. Не делайте это слишком подробно.
- После того, как вы выбрали дизайн, убедитесь что компоненты будут хорошо поддерживаться.
- Нарисуйте каждую часть вашего робота в бумаге или картоне со шкалой 1:1 (реальный размер). Вы также можете нарисовать их с помощью программного обеспечения САПР и распечатать их.
- Протестируйте свой дизайн в САПР и в реальной жизни с помощью прототипа бумаги, проверив каждую деталь и соединения.
- Если вы абсолютно уверены, что ваш дизайн правильный, наконец начните изготавливать каркас из выбранных материалов. Помните, дважды измерьте и вырежьте только один раз!
- Перед монтажом рамы проверьте соответствие каждого компонента и, если потребуются, модифицируйте его.
- Соберите свою раму, используя горячий клей, винты, гвозди или любые другие соединения, которые вы выбирали для изготовления своего робота.
- Установите все компоненты на каркас. Так вы только что создали робота с нуля!
Сборка компонентов робота, из приведенного выше списка заслуживает отдельного рассмотрения.
Сборка компонентов робота
На предыдущих уроках вы выбрали электрические компоненты и исполнительные механизмы. Теперь вам нужно, чтобы они все работали вместе. Как всегда, техническое описание и руководства — это ваши друзья, когда вы понимаете, как должно работать ваше роботизированное оборудование.
Подключение двигателей к контроллерам двигателей
Электродвигатель постоянного тока или линейный привод постоянного тока, скорее всего, имеют два провода: красный и черный. Подключите красный провод к клемме M + на контроллере двигателя постоянного тока, а черный — к M-.
Реверсирование проводов приведет только к вращению двигателя в противоположном направлении. У сервомотора, есть три провода: один черный (GND), красный (от 4,8 до 6 В) и желтый (сигнал положения). Контроллер серводвигателя имеет контакты, соответствующие этим проводам, поэтому сервопривод может быть подключен непосредственно к нему.
Подключение аккумуляторов к контроллеру двигателя или к микроконтроллеру
Изготовление робота включает в себя подключение электропитания. Большинство контроллеров моторов имеют две винтовые клеммы для проводов батареи, обозначенных как B + и B-. Если ваша батарея поставляется с разъемом, а ваш контроллер использует винтовые клеммы, вы можете найти разъем для соединения с проводами.
Провода вы можете подключить к винтовому соединению. Хотя вам может потребоваться найти другой способ подключения аккумулятора к контроллеру двигателя.Возможно, что не все электромеханические устройства, которые вы выбрали для своего робота, могут работать при одинаковом напряжении.
Следовательно, могут потребоваться несколько цепей управления батареями или напряжением. Ниже приведены обычные уровни напряжения, используемые в общих компонентах роботизированных платформ:
- электродвигатели постоянного тока — от 3 до 24 В
- стандартные серводвигатели — от 4,8 В до 6 В
- специальные сервомоторы — от 7,4 до 12 В
- шаговые двигатели — от 6 до 12 В
- микроконтроллеры обычно включают регуляторы напряжения — от 3 до 12 В
- датчики — 3,3 В, 5 В и 12 В
- контроллеры постоянного тока — от 3 до 48 В
- стандартные батареи: 3.7V, 4.8V, 6V, 7.4V, 9V, 11.1V и 12V.
Если вы создаёте робота с двигателями постоянного тока, микроконтроллером и, возможно, сервомеханизмом или двумя, то можно легко понять, что одна батарея не может напрямую управлять всем. Прежде всего, мы рекомендуем выбрать батарею, к которой можно напрямую подключать как можно больше устройств.
Батарея с наибольшей емкостью должна быть связана с приводными двигателями. Например, если выбранные вами двигатели рассчитаны на номинальное напряжение 12 В, то ваша основная батарея также должна быть 12 В. Дополнительно вы можете использовать регулятор для питания микроконтроллера на 5 В.
Техника безопасности при работе с аккумуляторами
Внимание: аккумуляторные батареи являются мощными устройствами и могут легко сжечь ваши цепи, если они подключены неправильно. Прежде всегда тройная проверка правильной полярности и возможности работы устройства с энергией, обеспечиваемой батареей.

говорящий робот
Подключение контроллеров двигателя к микроконтроллеру
Микроконтроллер может взаимодействовать с контроллерами двигателя различными способами:
- Стандартный: контроллер имеет два контакта с маркировкой Rx (прием) и Tx (передача). Подключите контакт Rx контроллера двигателя к выходу Tx микроконтроллера и наоборот.
- I2C: контроллер двигателя будет иметь четыре контакта: SDA, SCL, V, GND. Ваш микроконтроллер будет иметь те же четыре контакта, но не обязательно помеченные. Просто подключите их один к одному.
- PWM (Pulse-width modulation): контроллер двигателя будет иметь как вход ШИМ, так и цифровой вход для каждого двигателя. Подключите входной контакт PWM контроллера двигателя к выходному контакту ШИМ на микроконтроллере. Соедините каждый цифровой входной контакт контроллера двигателя с цифровым выходным выводом на микроконтроллере.
- R / C: Чтобы подключить микроконтроллер к контроллеру двигателя R / C, вам необходимо подключить сигнальный контакт к цифровому выходу на микроконтроллере.
Независимо от способа связи логика контроллера двигателя и микроконтроллер должны совместно использовать один и тот же опорный сигнал заземления. Это достигается путем соединения контактов GND (земля) вместе.
В первую очередь нужно соединить контакты одного и того же логического высокого уровня. Этого можно добиться, используя тот же вывод V+ для питания оба устройства. Переключатель логического уровня требуется, если устройства не используют одни и те же логические уровни (например, 3.3V и 5V)
Подключение датчиков к микроконтроллеру
При изготовлении робота обязательно используются сенсорные устройстве -в первую очередь датчики. Датчики могут быть сопряжены с микроконтроллерами аналогично контроллерам двигателя. Датчики (сенсоры) могут использовать следующие типы связи:
- Цифровой: датчик имеет цифровой вывод сигнала, который подключается непосредственно к цифровому выходу микроконтроллера. Простой переключатель можно рассматривать как цифровой датчик.
- Аналоговый: аналоговые датчики производят аналоговый сигнал напряжения, который должен считываться аналоговым выводом. Если ваш микроконтроллер не имеет аналоговых контактов, вам понадобится отдельная аналого-цифровая схема (АЦП). Кроме того, некоторые датчики с требуемой схемой питания обычно имеют три контакта: V+, GND и Signal. Например, если датчик представляет собой простой переменный резистор, вам потребуется создать делитель напряжения для считывания полученного переменного напряжения.
- Стандартный или I2C: здесь применяются те же принципы связи, которые описаны для контроллеров двигателей.
Устройство связи с микроконтроллером
Большинство коммуникационных устройств (например, XBee, Bluetooth) используют последовательную связь. Следовательно требуются те же соединения RX, TX, GND и V+. Важно отметить, что, хотя несколько последовательных подключений могут использоваться совместно на одних и тех же выводах RX и TX, для предотвращения перекрестных помех, ошибок и сбоев в целом требуется надежное управление.
Если у вас очень мало последовательных устройств, часто бывает проще использовать один последовательный порт для каждого из них.
Колеса для двигателей
В идеале, вы выбрали колеса или звездочки, которые предназначены для установки на вал вашего электродвигателя. Возможно, вам придется подгонять отверстия для соединения двигателей, рулевого управления и различных проводов в одну конструкцию.
Электрические компоненты для рамы
При изготовлении робота вы можете смонтировать электронные компоненты на раме робота при помощи множества методов. Прежде всего убедитесь в том, что ваши крепления надежны. Основные методы креплений включают в себя: винты, гайки, двухсторонний скотч, липучки, клей, стяжки и т. д.
Практическая часть
В нашем случае мы будем использовать набор Lego EV3 и для создания каркаса робота нам потребуются только стандартные детали, которые уже входят в состав набора. Изготовление робота на основе набора Лего является прежде всего относительно несложным и достаточно быстрым.
wikiHow работает по принципу вики, а это значит, что многие наши статьи написаны несколькими авторами. При создании этой статьи над ее редактированием и улучшением работали, в том числе анонимно, 27 человек(а).
Многие люди хотели бы сконструировать робота, как машину, которая бы работала автономно. Однако, если немного расширить понятие слова “робот”, то телеуправляемые объекты могут вполне считаться роботом. Возможно, вы подумаете, что сложновато это будет, собрать робота на пульте управления, но все на самом деле легче, чем кажется. Данная статья вам поведает, как собрать телеуправляемого робота.

Определитесь с тем, что вы будете строить. Вы вряд ли сможете собрать полномасштабного, двуногого гуманоида, который сможет выполнять все ваши прихоти. К тому же это не будет и робот с различными клешнями, способными хватать и перетаскивать 5-ти килограммовые объекты. Вы начнете с постройки робота, который сможет перемещаться вперед - назад, влево и вправо по беспроводной команде с пульта управления. Однако, после того, как вы освоите основные аспекты, вы сможете усовершенствовать свою конструкцию и добавить различные инновации, просто следуйте указанию: “Нет на свете законченного робота”. Всегда можно что-то добавить и улучшить.

Семь раз отмерь - один раз отрежь. Перед тем, как начинать непосредственную сборку робота, даже перед заказом необходимых деталей. Ваш первый робот будет выглядеть, как два серводвигателя на плоском кусочке пластмассы. Данный дизайн очень прост и оставляет вам место для усовершенствований. Размер такой модели будет примерно 15 на 20 сантиметров. Для создания такого простого робота вы можете просто схематически нарисовать его с помощью линейки, бумаги и карандаша в реальном размере. Для более крупных и сложных проектов, вам понадобится изучить правила масштабирования и автоматизированного программирования.

- Выбор сервомоторов, которые вам необходимы для приведения робота в движение. Один мотор будет двигать передние колеса, а второй - задние. Таким образом, вы сможете использовать самый простой метод рулевого управления, - дифференциальную передачу, означающую, что оба мотора вращаются вперед при движении робота вперед, оба мотора вращаются назад при движении робота назад, а для совершения одного из поворотов, - один мотор работает, а другой нет. Серводвигатель отличается от обычного двигателя переменного тока тем, что первый способен только вращаться на 180 градусов и передавать информацию обратно на свою позицию. Данный проект будет задействовать сервомотор, потому что так будет легче и вам не нужно покупать дорогой регулятор скорости или отдельную коробку передач. После того, как вы разберетесь в том, как собрать робота на пульте управления, вы сможете сконструировать другого или модифицировать того, что у вас есть, используя двигатели переменного тока вместо сервомоторов. Существует 4 важных аспекта, о которых стоит серьезно подумать перед покупкой сервомотора, а точнее: скорость, крутящий момент, размер/вес и, если их можно модифицировать на вращение на 360 градусов. Поскольку сервомоторы способны вращаться только на 180 градусов, ваш робот сможет продвинуться только лишь немного вперед. При возможности модификации на 360 градусов, вы сможете настроить двигатель так, что он будет беспрерывно вращаться в одну сторону и позволять роботу ехать постоянно в одну или другую сторону. Размер и вес очень важны для данного проекта, потому что, скорее всего, у вас останется много свободного места в любом случае. Постарайтесь найти что-нибудь среднего размера. Крутящий момент является мощностью двигателя. Именно для этого используется коробка передач. Если у мотора нет коробки передач и крутящий момент низкий, то ваш робот, скорее всего, и с места не сдвинется поскольку ему не хватит на то мощности. Вы всегда можете купить и присоединить более сильный или быстрый двигатель после завершения сборки. Помните, чем больше скорость, тем меньше будет мощность. Рекомендуется приобрести сервомашинку “HS-311” для первого прототипа робота. Данный двигатель располагает хорошим балансом скорости и мощности, является недорогим и подходящим по размеру для данного робота.
- Так как эта сервомашинка способна только совершать вращение на 180 градусов, вам придется перенастроить ее на 360 градусов, но данная процедура нарушит гарантию на покупку, но вам будет необходимо на это пойти, чтобы дать роботу возможность более свободно передвигаться. Инструкции по этому поводу можно найти в интернете.
- Выберите батарейки. Существует 4 вида батареек, среди которых мы будем выбирать: литий полимерная, никель-металлогидридная, никель-кадмиевая и щелочная батарея.
- Батареи литий полимер является самыми новыми и невероятно легкими. Однако, они опасные, дорогие и вам нужно будет использовать специальное зарядное устройство. Используйте данный вид батареи, если у вас есть опыт в роботехнике и вы готовы раскошелиться на свой проект.
- Никель-кадмиевая является обычной перезаряжаемой батареей. Данный вид используется во многих роботах. Проблема заключается в том, что, если вы перезарядите их до того, как они полностью разряжены, они не будут в состоянии работать так же долго, как при полной зарядке.
- Никель-металлогидридная батарея очень похожа на никель-кадмиевую размером, весом и ценой, но она имеет лучшую эффективность работы, и именно этот вид батареи рекомендуется для начинающих техников.
- Щелочная батарея является распространенным видом неперезаряжаемой батареи. Эти батарейки очень популярные, дешевые и легкодоступные. Однако, они быстро разряжаются и вам постоянно придется их покупать. Не используйте их.
![Изображение с названием Build a Remote Controlled Robot Step 4]()
Теперь, когда вы выбрали необходимые детали, закажите их через интернет. Постарайтесь заказывать их с как можно меньшего количества сайтов, что позволит вам сэкономить на доставке и получить все детали в одно и то же время.
![Изображение с названием Build a Remote Controlled Robot Step 5]()
Измерьте и вырежьте рамку. Возьмите линейку и режущий предмет, и измерьте длину и ширину ходовой рамки, примерно 15 (см) на 20 (см). А теперь, проверьте насколько ровные у вас получились линии. Помните, семь раз отмерь, один раз отрежь. Если вы используете пластиковую доску, то вам удастся ее разрезать точно так же, как и ее деревянную тезку.
![Изображение с названием Build a Remote Controlled Robot Step 6]()
- Поместите серводвигатели на донную сторону пластмассовой доски около края. Та сторона сервомотора, которая имеет стержень должна быть направлена во внешнюю сторону. Убедитесь в том, что у вас достаточно места для зацепления колес.
- Прикрепите колеса к моторам, используя винтики, которые вам доставили вместе с моторами.
- Прилепите один кусочек липучки на приемник, а другой - на батарейный блок.
- Прилепите два кусочка противоположного вида липучки на робота и прикрепите приемник и батарейный блок к нему.
- Перед вами предстал робот с двумя колесиками с одной стороны, а другая сторона которого просто тащится по полу, но мы пока не будем добавлять третьего колеса.
![Изображение с названием Build a Remote Controlled Robot Step 7]()
Подсоедините провода. Теперь, когда все части расположены на своих местах, необходимо все подсоединить к приемнику. Подключите батарею к приемнику туда, где написано “питание” или “аккумулятор”, постарайтесь подсоединить все правильно. Далее подсоедините сервомоторы к приемнику там, где написано “канал 1” и “канал 2”.
На зарядку становись. Отсоедините батарею от приемника и подсоедините ее к зарядному устройству. Зарядка может занять около 24 часов, так что наберитесь терпения.
![Изображение с названием Build a Remote Controlled Robot Step 9]()
![Как сделать робота]()
Необходимые материалы
- 2 куска провода
- 1 моторчик
- 1 батарейка AA
- 3 канцелярские кнопки
- 2 кусочка пенокартона или похожего по свойствам материала
- 2-3 головки старых зубных щеток или несколько скрепок
![Материалы для робота]()
1. Прикрепляем батарейку к мотору
С помощью клеящего пистолета прикрепляем кусочек пенокартона к корпусу мотора. Затем к приклеиваем к нему батарейку.
![Прикрепляем батарейку]()
![Прикрепляем батарейку]()
2. Дестабилизатор
Этот шаг может показаться не совсем понятным. Однако, чтобы сделать робота, необходимо заставить его двигаться. Надеваем на ось мотора маленький продолговатый кусочек пенокартона и закрепляем его с помощью клеевого пистолета. Такая конструкция придаст мотору дисбаланс, что и приведет всего робота в движение.
![Дестабилизатор]()
На самый конец дестабилизатора капните пару капель клея, или прикрепите какой-нибудь декоративный элемент — это добавит нашему творению индивидуальности и увеличит амплитуду его движений.
![Дестабилизатор]()
3. Ноги
Теперь необходимо снабдить робота нижними конечностями. Если вы будете использовать для этого головки зубных щеток, то приклейте их к нижней части мотора. В качестве прослойки можно использовать всё тот же пенокартон.
![Ноги робота]()
![Ноги робота]()
![Ноги робота]()
![Ноги робота]()
4. Провода
Следующим шагом прикрепим два наших отрезка провода к контактам моторчика. Можно их просто прикрутить, но ещё лучше будет припаять их, это сделает робота более долговечным.
![Провода]()
5. Подключение батарейки
Используя термопистолет, приклеем провод к одному из концов батареи. Можете выбрать любой из двух проводов и любую сторону батареи — полярность в данном случае роли не играет. Если у вас хорошо получается паять, в этом шаге также можно воспользоваться пайкой вместо клея.
![Подключаем мотор]()
![Подключаем мотор]()
6. Глаза
В качестве глаз робота вполне подойдет пара бусинок, которые прикрепляем термоклеем к одному из концов батарейки. На этом шаге можно проявить фантазию и придумать внешний вид глаз на своё усмотрение.
![Подключаем мотор]()
7. Запуск
Теперь давайте оживим нашу самоделку. Возьмите свободный конец провода и прикрепите его с незанятому контакту батареи с помощью липкой ленты. Не стоит использовать на этом шаге термоклей, потому что это не позволит вам при необходимости отключить мотор.
![Запуск робота]()
![Робот готов]()
А вот как может выглядеть наш самодельный робот, если проявить больше фантазии:
Сегодня в списке детских предпочтений плюшевый медведей и зайцев потеснил новый персонаж – робот. Магазинные полки ломятся от огромного количества разных моделей киборгов, андроидов, трансформеров.
![]()
![]()
Краткое содержимое обзора:
Нюансы создания роботов
Из чего можно сделать робота своими руками? Это зависит от того, кто будет этим заниматься.
![]()
Если ребёнок, то его родителям следует предложить ему внимательно просмотреть модели из ненужных коробок, картона, бумаги, спичечных коробков, сигаретных пачек, пластиковых бутылок, съедобной мастики, чтобы выбрать подходящий вариант.
![]()
Маме легче создать для ребёнка вязаного или съедобного киборга. А если созданием робота планирует заняться папа, то чадо может рассчитывать на более сложную конструкцию, например, получить высокотехничного андроида.
![]()
Бумажный робот
- бумагу формата А4;
- ножницы;
- клей.
![]()
![]()
![]()
![]()
![]()
![]()
Также вам потребуется цветной принтер. Создание подобной поделки учит ребёнка быть терпеливым, усидчивым и аккуратным. Ничего сложно в процессе изготовления здесь нет.
![]()
- Распечатать цветной шаблон робота. Схему можно отыскать в Интернете.
- Аккуратно вырезать по контуру составные элементы и согнуть их по обозначенным линиям.
- Собрать фигурку. Для этого нужно промазать припуски на каждой заготовке клеем. Склеивать детали желательно начать с головы. Затем ноги, руки, тело. Все углы должны быть прямыми. Припуски нужно спрятать внутрь.
- Добавить декора. Это могут быть вставки из фольги или цветного картона, пластиковые элементы
![]()
Вязаный робот Биби
![]()
- крючок;
- цветная пряжа;
- наполнитель;
- картон;
- немного проволоки.
![]()
Подберите в Интернете понравившуюся схему и приступайте к вязанию. В антенну вставьте проволоку. Так её станет можно загибать.
![]()
![]()
![]()
![]()
![]()
![]()
![]()
Робот из спичечных коробков
Такая самоделка до неприличия проста в изготовлении, но очень симпатична. Она создаётся из девяти коробков, цветной бумаги и клея.
![]()
Коробки нужно обклеить цветной бумагой и сформировать из них фигурку робота. Не забудьте прорисовать лицо фломастером, и прикрепить антенны из спичек.
![]()
Мобильный робот
- провод – 2 шт.;
- моторчик – 1 шт.;
- батарейку AA;
- канцелярские кнопки – 3 шт.;
- пенокартон – 2 куска;
- головные части старых зубных щёток – 3 шт.
![]()
- Присоедините батарейку к мотору. В качестве промежуточного слоя между ними вставьте кусок пенокартона. Фиксацию проводите при помощи клея.
- Займитесь устройством дестабилизатора. С этой целью наденьте на ось моторчика небольшой кусок пенокартона вытянутой формы и закрепите его на клей. На кончик дестабилизатора приклейте какое-либо украшение. Так вы увеличите амплитуду его движения.
- Снабдите андроида конечностями. Для этого приклейте головки от зубных щёток к нижней стороне моторчика. Роль прослойки отдайте пенокартону.
- Припаяйте отрезки провода к контактам мотора.
- Конец одного из проводов приклейте к одному из концов батарейки.
- Возьмите две бусины и прикрепите их к торцу батарейки. Это будут глаза.
- Запустите робота. Для этого свободный конец провода подсоедините к свободному контакту батарейки и зафиксируйте скотчем. Создание андроида завершено.
![]()
Вот мы и рассмотрели самые популярные способы, как сделать робота ребенку своими руками.
![]()
Главное, что следует запомнить – в изготовлении подобных поделок нет ничего трудного.
![]()
![]()
![]()
![]()
![]()
![]()
Важно лишь, чтобы было желание и немного свободного времени. Не бойтесь фантазировать и вносить что-то новое в готовые модели. Помните, оригинальность ценится всегда и всеми.
![]()
Фото роботов своими руками
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
Читайте также:







































































































