
Как сделать робота из проводов
Добавил пользователь Евгений Кузнецов Обновлено: 04.10.2024
ПРОСТЕЙШИЙ РОБОТ НА ОДНОЙ МИКРОСХЕМЕ
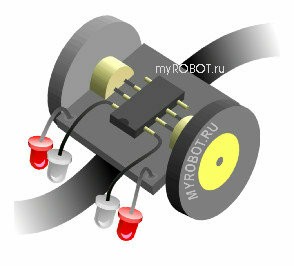
Сделать робота можно, используя лишь одну микросхему драйвера моторов и пару фотоэлементов. В зависимости от способа соединения моторов, микросхемы и фотоэлементов робот будет двигаться на свет или, наоборот, прятаться в темноту, бежать вперед в поисках света или пятиться, как крот, назад. Если добавить в схему робота пару ярких светодиодов, то можно добиться, чтобы он бегал за рукой и даже следовал по темной или светлой линии.

Принцип поведения робота основывается на "фоторецепции" и является типичным для целого класса BEAM-роботов. В живой природе, которой будет подражать наш робот, фоторецепция - одно из основных фотобиологических явлений, в котором свет выступает как источник информации.
В качестве первого опыта обратимся к устройству BEAM-робота, двигающегося вперед, когда на него падает луч света, и останавливающегося, когда свет перестает его освещать. Поведение такого робота называется фотокинезисом - ненаправленным увеличением или уменьшением подвижности в ответ на изменения уровня освещённости.
В устройстве робота, кроме микросхемы драйвера моторов L293D , будет использоваться только один фотоэлемент и один электромотор. В качестве фотоэлемента можно применить не только фототранзистор, но и фотодиод или фоторезистор.
В конструкции робота мы используем фототранзистор n-p-n структуры в качестве фотосенсора. Фототранзисторы на сегодняшний день являются, пожалуй, одним из самых распространенных видов оптоэлектронных приборов и отличаются хорошей чувствительностью и вполне приемлемой ценой.
На рисунке приведены монтажная и принципиальная схемы робота, и если Вы еще не очень хорошо знакомы с условными обозначениями, то, исходя из двух схем, несложно понять принцип обозначения и соединения элементов. Провод, соединяющий различные части схемы с "землей" (отрицательным полюсом источника питания), обычно не изображают полностью, а на схеме рисуют небольшую черточку, обозначающую, что это место соединяется с "землей". Иногда рядом с такой черточкой пишут три буквы "GND", что означает "землю" (ground). Vcc обозначает соединение с положительным полюсом источника питания. Вместо букв Vcc часто пишут +5V, показывая тем самым напряжение источника питания.
Принцип действия схемы робота очень простой. Когда на фототранзистор PTR1 упадет луч света, то на входе INPUT1 микросхемы драйвера двигателей появится положительный сигнал и мотор M1 начнет вращаться. Когда фототранзистор перестанут освещать, сигнал на входе INPUT1 исчезнет, мотор перестанет вращаться и робот остановится. Более подробно о работе с драйвером двигателей можно прочитать в предыдущей статье "Драйвер двигателей L293D".

Чтобы скомпенсировать проходящий через фототранзистор ток, в схему введен резистор R1, номинал которого можно выбрать около 200 Ом. От номинала резистора R1 будет зависеть не только нормальная работа фототранзистора, но и чувствительность робота. Если сопротивление резистора будет большим, то робот будет реагировать только на очень яркий свет, если - небольшим, то чувствительность будет более высокой. В любом случае не следует использовать резистор с сопротивлением менее 100 Ом, чтобы предохранить фототранзистор от перегрева и выхода из строя.

Сделать робота, реализующего реакцию фототаксиса (направленного движения к свету или от света), можно с использованием двух фотосенсоров.
Когда на один из фотосенсоров такого робота попадает свет, включается соответствующий сенсору электромотор и робот поворачивает в сторону света до тех пор, пока свет не осветит оба фотосенсора и не включится второй мотор. Когда оба сенсора освещены, робот движется навстречу источнику света. Если один из сенсоров перестает освещаться, то робот снова поворачивает в сторону источника света и, достигнув положения, при котором свет падает на оба сенсора, продолжает свое движение на свет. Если свет перестает падать на фотосенсоры, робот останавливается.
Схема робота симметричная и состоит из двух частей, каждая из которых управляет соответствующим электромотором. По сути, она является как бы удвоенной схемой предыдущего робота. Фотосенсоры следует располагать крест-накрест по отношению к электромоторам так, как показано на рисунке робота выше. Также можно расположить моторы крест-накрест относительно фотосенсоров так, как показано на монтажной схеме ниже.

Если мы расположим сенсоры в соответствии с левым рисунком, то робот будет избегать источников света и его реакции будут похожи на поведение крота, прячущегося от света.

Сделать поведение робота более живым можно, подав на входы INPUT2 и INPUT3 положительный сигнал (подключить их к плюсу источника питания): робот будет двигаться при отсутствии падающего на фотосенсоры света, а "увидев" свет, будет поворачивать в сторону его источника. Когда свет будет падать на оба сенсора, робот остановится.
Дорогой Бобот, а можно ли использовать в приводимой схеме простейшего робота какие-либо другие микросхемы, например L293DNE?
Конечно, можно, но видишь ли, в чем дело, дружище Бибот. Настоящая L293D выпускается только группой компаний ST Microelectronics. Все остальные подобные микросхемы являются лишь заменителями или аналогами L293D . К таким аналогам относятся L293DNE американской компании Texas Instruments, SCP-3337 от Sensitron Semiconductor. Естественно, что, как и многие аналоги, эти микросхемы имеют свои отличия, которые тебе будет необходимо учитывать, когда ты будешь делать своего робота.
А не мог бы ты рассказать об отличиях, которые мне необходимо будет учесть при использовании L293DNE.
С удовольствием, старина Бибот. Все микросхемы линейки L293D имеют входы, совместимые с TTL-уровнями*, но лишь совместимостью уровней некоторые из них не ограничиваются. Так, L293DNE имеет не только совместимость с TTL по уровням напряжения, но и обладает входами с классической TT-логикой. То есть на неподключенном входе присутствует логическая "1".
Прости, Бобот, но я не совсем понимаю: как же мне это учитывать?
Если на неподключенном входе у L293DNE присутствует высокий уровень (логическая "1"), то и на соответствующем выходе мы будем иметь сигнал высокого уровня. Если мы теперь подадим на рассматриваемый вход сигнал высокого уровня, говоря по другому - логическую "1" (соединим с "плюсом" питания), то на соответствующем выходе ничего не изменится, так как на входе у нас и до этого была "1". Если же мы подадим на наш вход сигнал низкого уровня (соединим с "минусом" питания), то состояние выхода изменится и на нем будет напряжение низкого уровня.
То есть получается все наоборот: L293D мы управляли с помощью положительных сигналов, а L293DNE нужно управлять с помощью отрицательных.
L293D и L293DNE можно управлять как в рамках отрицательной логики, так и в рамках положительной*. Для того чтобы управлять входами L293DNE с помощью положительных сигналов, нам будет необходимо подтянуть эти входы к "земле" подтягивающими резисторами.
Тогда, при отсутствии положительного сигнала, на входе будет присутствовать логический "0", обеспечиваемый подтягивающим резистором. Хитроумные янки называют такие резисторы pull-down, а при подтягивании высокого уровня - pull-up.
Насколько я понял, все, что нам нужно будет добавить в схему простейшего робота, - так это подтягивающие резисторы на входы микросхемы драйвера моторов.
Ты совершенно правильно понял, дорогой Бибот. Номинал этих резисторов можно выбрать около 4,7 кОм. Тогда схема простейшего робота будет выглядеть следующим образом.
Причем от номинала резистора R1 будет зависеть чувствительность нашего робота. Чем сопротивление R1 будет меньше, тем чувствительность робота будет ниже, а чем оно будет больше, тем чувствительность будет выше.
А так как в данном случае нам нет необходимости управлять мотором в двух направлениях, то второй вывод мотора мы можем подключить напрямую к "земле". Что даже несколько упростит схему.
И последний вопрос. А в тех схемах роботов, которые ты привел в рамках нашей беседы, может быть использована классическая микросхема L293D?
Конечно, может. И я бы даже добавил, что использование pull-down резисторов для L293D будет вполне оправдано.
Чтобы сделать робота, "бегающего" за рукой, нам понадобятся два ярких светодиода (на схеме LED1 и LED2). Подключим их через резисторы R1 и R4, чтобы скомпенсировать протекающий через них ток и предохранить от выхода из строя. Расположим светодиоды рядом с фотосенсорами, направив их свет в ту же сторону, в которую ориентированы фотосенсоры, и уберем сигнал с входов INPUT2 и INPUT3.

Задача получившегося робота - реагировать на отраженный свет, который излучают светодиоды. Включим робота и поставим ладонь перед одним из фотосенсоров. Робот повернет в сторону ладони. Переместим ладонь немного в сторону так, чтобы она скрылась из поля "зрения" одного из фотосенсоров, в ответ робот послушно, как собачка, повернет за ладонью.
Светодиоды следует подбирать достаточно яркие, чтобы отраженный свет устойчиво улавливался фототранзисторами. Хороших результатов можно достичь при использовании красных или оранжевых светодиодов с яркостью более 1000 мКд.
Если робот реагирует на вашу руку только тогда, когда она почти касается фотосенсора, то можно попробовать поэкспериментировать с листочком белой бумаги: отражающие способности белого листа намного выше, чем у человеческой руки, и реакция робота на белый листок будет намного лучше и устойчивее.
Белый цвет обладает самыми высокими отражающими свойствами, черный - наименьшими. Основываясь на этом, можно сделать робота, следующего по линии. Сенсоры при этом следует расположить так, чтобы они были направлены вниз. Расстояние между сенсорами должно быть немного больше, чем ширина линии.
Cхема робота, следующего по черной линии, идентична предыдущей. Чтобы робот не терял черную линию, нарисованную на белом поле, ее ширина должна быть около 30 мм или шире. Алгоритм поведения робота достаточно прост. Когда оба фотосенсора улавливают отраженный от белого поля свет, робот движется вперед. Когда один из сеносоров заезжает на черную линию, соответствующий электромотор останавливается и робот начинает поворачиваться, выравнивая свое положение. После того как оба сенсора снова находятся над белым полем, робот продолжает свое движение вперед.
Примечание:
На всех рисунках роботов микросхема драйвера двигателей L293D показана условно (только управляющие входы и выходы).
Необходимые материалы
- 2 куска провода
- 1 моторчик
- 1 батарейка AA
- 3 канцелярские кнопки
- 2 кусочка пенокартона или похожего по свойствам материала
- 2-3 головки старых зубных щеток или несколько скрепок

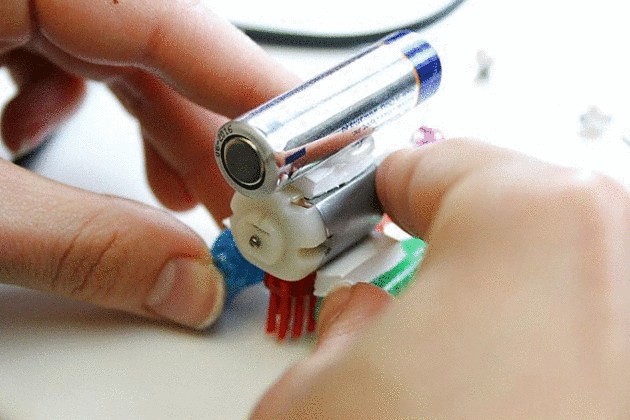
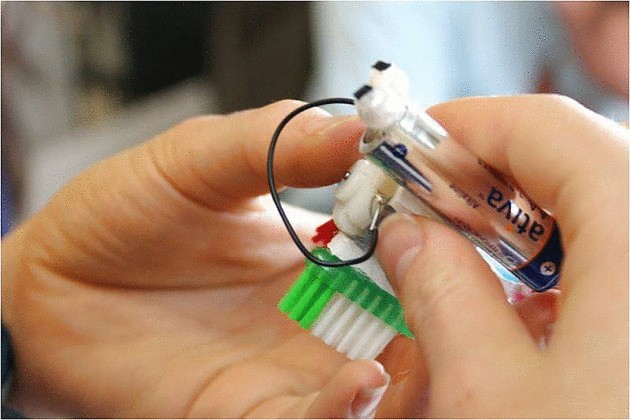
1. Прикрепляем батарейку к мотору
С помощью клеящего пистолета прикрепляем кусочек пенокартона к корпусу мотора. Затем к приклеиваем к нему батарейку.
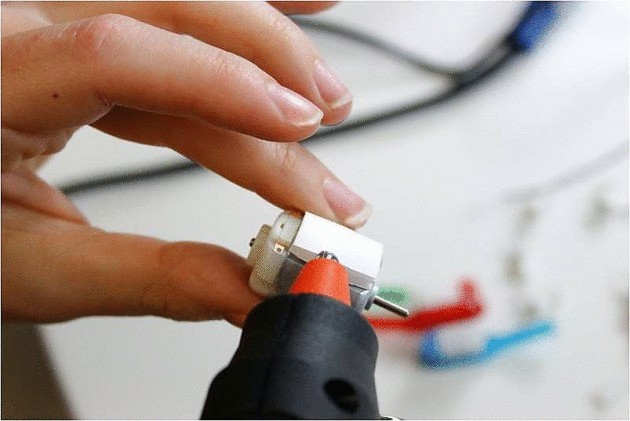

2. Дестабилизатор
Этот шаг может показаться не совсем понятным. Однако, чтобы сделать робота, необходимо заставить его двигаться. Надеваем на ось мотора маленький продолговатый кусочек пенокартона и закрепляем его с помощью клеевого пистолета. Такая конструкция придаст мотору дисбаланс, что и приведет робота в движение.

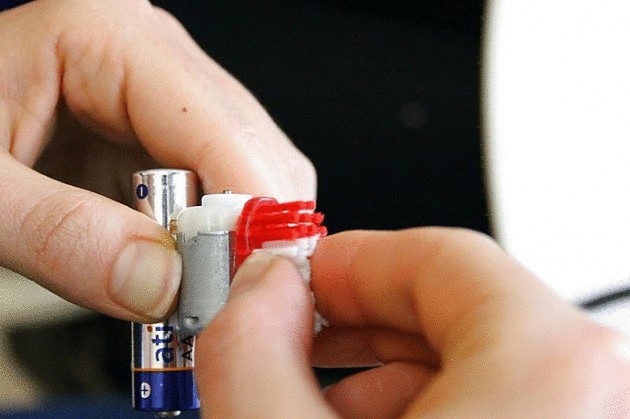
На самый конец дестабилизатора капните пару капель клея, или прикрепите какой-нибудь декоративный элемент — это добавит роботу индивидуальности и увеличит амплитуду его движений.

3. Ноги
Теперь необходимо снабдить робота нижними конечностями. Если вы будете использовать для этого головки зубных щеток, то приклейте их к нижней части мотора. В качестве прослойки можно использовать всё тот же пенокартон.


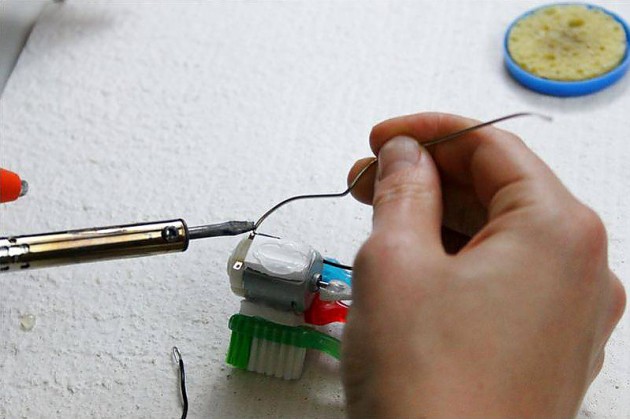
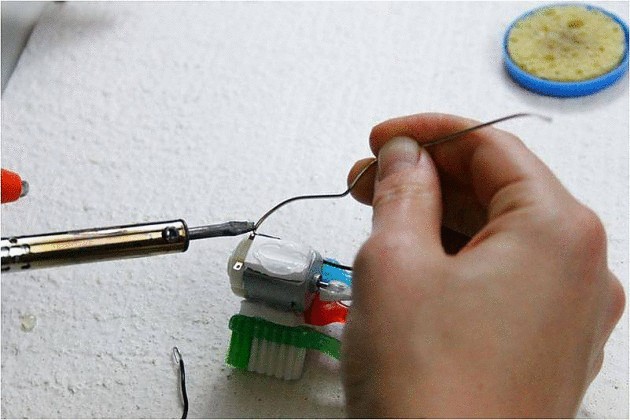
4. Провода
Следующим шагом прикрепим два наших отрезка провода к контактам моторчика. Можно их просто прикрутить, но ещё лучше будет припаять их, это сделает робота более долговечным.
5. Подключение батарейки
Используя термопистолет, приклеем провод к одному из концов батареи. Можете выбрать любой из двух проводов и любую сторону батареи — полярность в данном случае роли не играет. Если у вас хорошо получается паять, в этом шаге также можно воспользоваться пайкой вместо клея.
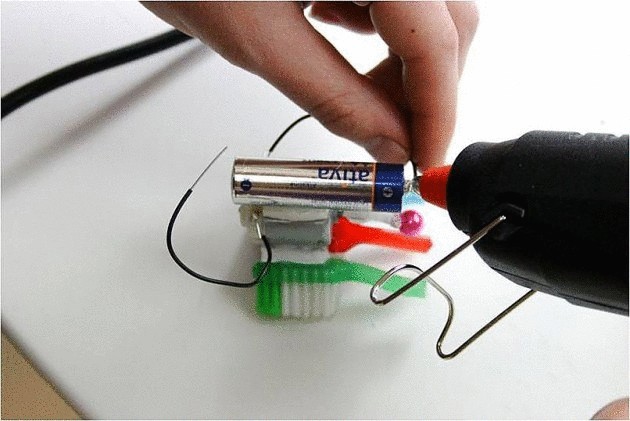
6. Глаза
В качестве глаз робота вполне подойдет пара бусинок, которые прикрепляем термоклеем к одному из концов батарейки. На этом шаге можно проявить фантазию и придумать внешний вид глаз на своё усмотрение.

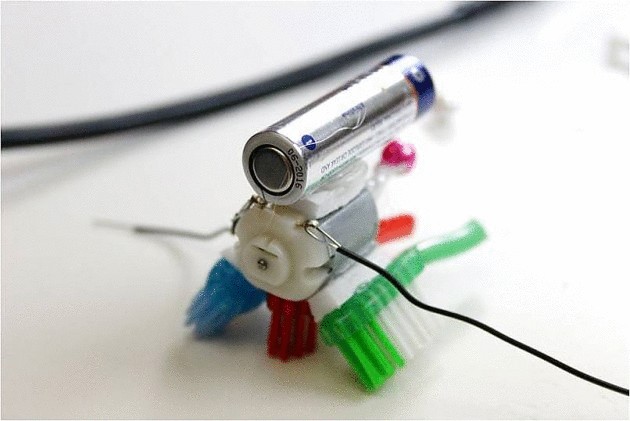
7. Запуск
Теперь давайте оживим нашего робота. Возьмите свободный конец провода и прикрепите его с незанятому контакту батареи с помощью липкой ленты. Не стоит использовать на этом шаге термоклей, потому что это не позволит вам при необходимости отключить мотор.
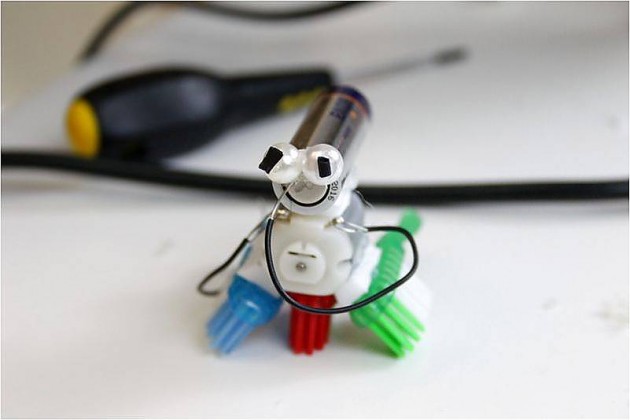
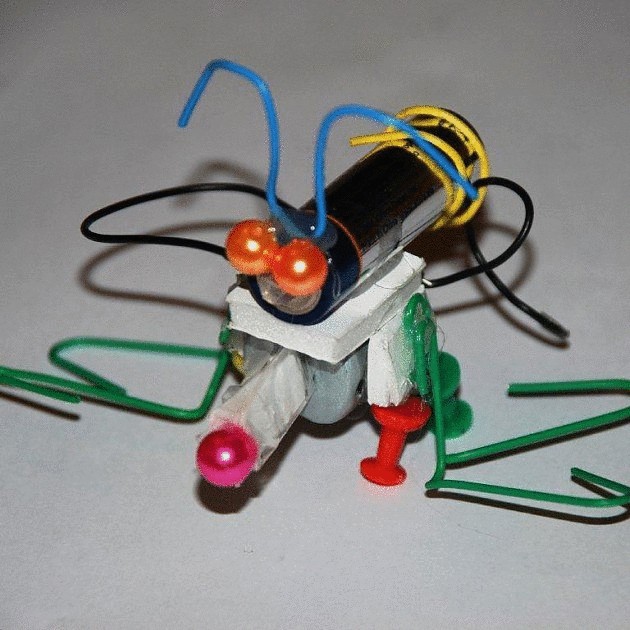
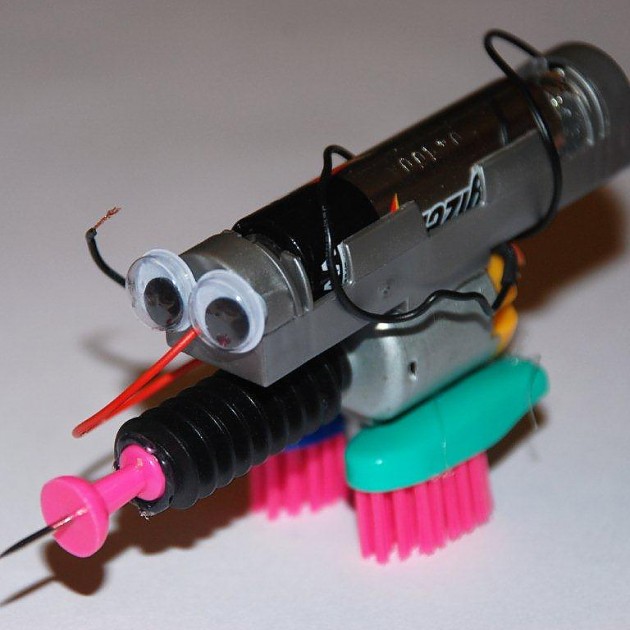
А вот как может выглядеть наш самодельный робот, если проявить больше фантазии:
Понравилась статья? Напишите свое мнение в комментариях.
Подпишитесь на наш ФБ:
Сегодня в списке детских предпочтений плюшевый медведей и зайцев потеснил новый персонаж – робот. Магазинные полки ломятся от огромного количества разных моделей киборгов, андроидов, трансформеров.


Краткое содержимое обзора:
Нюансы создания роботов
Из чего можно сделать робота своими руками? Это зависит от того, кто будет этим заниматься.

Если ребёнок, то его родителям следует предложить ему внимательно просмотреть модели из ненужных коробок, картона, бумаги, спичечных коробков, сигаретных пачек, пластиковых бутылок, съедобной мастики, чтобы выбрать подходящий вариант.

Маме легче создать для ребёнка вязаного или съедобного киборга. А если созданием робота планирует заняться папа, то чадо может рассчитывать на более сложную конструкцию, например, получить высокотехничного андроида.

Бумажный робот
- бумагу формата А4;
- ножницы;
- клей.






Также вам потребуется цветной принтер. Создание подобной поделки учит ребёнка быть терпеливым, усидчивым и аккуратным. Ничего сложно в процессе изготовления здесь нет.

- Распечатать цветной шаблон робота. Схему можно отыскать в Интернете.
- Аккуратно вырезать по контуру составные элементы и согнуть их по обозначенным линиям.
- Собрать фигурку. Для этого нужно промазать припуски на каждой заготовке клеем. Склеивать детали желательно начать с головы. Затем ноги, руки, тело. Все углы должны быть прямыми. Припуски нужно спрятать внутрь.
- Добавить декора. Это могут быть вставки из фольги или цветного картона, пластиковые элементы

Вязаный робот Биби

- крючок;
- цветная пряжа;
- наполнитель;
- картон;
- немного проволоки.

Подберите в Интернете понравившуюся схему и приступайте к вязанию. В антенну вставьте проволоку. Так её станет можно загибать.







Робот из спичечных коробков
Такая самоделка до неприличия проста в изготовлении, но очень симпатична. Она создаётся из девяти коробков, цветной бумаги и клея.

Коробки нужно обклеить цветной бумагой и сформировать из них фигурку робота. Не забудьте прорисовать лицо фломастером, и прикрепить антенны из спичек.

Мобильный робот
- провод – 2 шт.;
- моторчик – 1 шт.;
- батарейку AA;
- канцелярские кнопки – 3 шт.;
- пенокартон – 2 куска;
- головные части старых зубных щёток – 3 шт.

- Присоедините батарейку к мотору. В качестве промежуточного слоя между ними вставьте кусок пенокартона. Фиксацию проводите при помощи клея.
- Займитесь устройством дестабилизатора. С этой целью наденьте на ось моторчика небольшой кусок пенокартона вытянутой формы и закрепите его на клей. На кончик дестабилизатора приклейте какое-либо украшение. Так вы увеличите амплитуду его движения.
- Снабдите андроида конечностями. Для этого приклейте головки от зубных щёток к нижней стороне моторчика. Роль прослойки отдайте пенокартону.
- Припаяйте отрезки провода к контактам мотора.
- Конец одного из проводов приклейте к одному из концов батарейки.
- Возьмите две бусины и прикрепите их к торцу батарейки. Это будут глаза.
- Запустите робота. Для этого свободный конец провода подсоедините к свободному контакту батарейки и зафиксируйте скотчем. Создание андроида завершено.

Вот мы и рассмотрели самые популярные способы, как сделать робота ребенку своими руками.

Главное, что следует запомнить – в изготовлении подобных поделок нет ничего трудного.






Важно лишь, чтобы было желание и немного свободного времени. Не бойтесь фантазировать и вносить что-то новое в готовые модели. Помните, оригинальность ценится всегда и всеми.

Фото роботов своими руками

















































Теперь, вы выбрали все основные компоненты для сборки робота. Изготовление робота начинается со следующего шага — необходимо спроектировать и построить основание или каркас. Каркас держит их всех вместе и придает вашему роботу законченный вид и форму.

сборка робота
Создание каркаса
При этом простой каркас может быть не менее хорошим. Идеальная форма встречается редко, но некоторые проекты могут выглядеть более элегантно из-за своей простоты. Возможно другие проекты могут привлечь внимание из-за их сложности.
Материалы
Существует много материалов, которые вы можете использовать для создания основания. Вы используете все множество материалов для создания не только роботов, но и других устройств. Следовательно вы получите хорошее представление о том, что наиболее подходит для данного проекта.
Список предлагаемых строительных материалов, приведенных ниже включает только наиболее распространенные. Как только вы используете некоторые из них, вы сможете поэкспериментировать с теми, которые не входят в список, или объединить их вместе.
Использовать существующие коммерческие продукты
Оно может либо сэкономить вам много времени и денег. Хотя и может создать дополнительные хлопоты и головную боль. Есть много очень хороших примеров того, как перепрофилировать материалы и сделать из них очень хорошего робота.
Основной строительный материал
Например, изготовление робота из картона. Некоторые из самых основных строительных материалов могут быть использованы для создания отличных каркасов. Одним из самых дешевых и наиболее доступных материалов является картон. Вы часто можете найти картон бесплатно, и его можно легко вырезать, согнуть, склеить и сложить.

робот из картона
Может быть вы можете создать усиленную картонную коробку, которая выглядит намного более красиво. И она соответствует размеру вашего робота. Затем вы можете нанести эпоксидную смолу или клей, чтобы сделать ее более долговечной. В заключение дополнительно можно разукрасить ее.
Плоский материал для конструкции
Один из наиболее распространенных способов сделать раму – это использовать стандартные материалы, такие как лист фанеры, пластика или металла. И просверлить отверстия для подключения всех исполнительных механизмов и электроники. Прочный кусок фанеры может быть довольно толстым и тяжелы. В то самое время как тонкий лист металла может быть слишком гибким.
Например, доску или фанеру из плотной древесины можно легко разрезать с помощью пилы, просверлить (не опасаясь разрушения), покрасить, отшлифовать и т.д. Следовательно вы можете устанавливать устройства с двух сторон. Например, подключить двигатели и колесики колес к нижней части, а электронику и аккумулятор к верхней части. При этом древесина останется неподвижной и твердой.
Лазерная резка, изогнутый пластик или металл
Если вы находитесь на том этапе, когда вам необходим внешний блок, то лучшим вариантом будет высокоточная резка деталей лазером. Любая ошибка в расчетах будет дорогостоящей и приведет к порче материалов. Для изготовления робота нужна собственная мастерская. Возможно нужно найти компанию, производящую такой тип роботов. Может быть она предлагает множество других услуг, включая работы с металлом и покраску.
3D-печать
3D принтер, печатающий раму или каркас, редко бывает наиболее обоснованным решением (потому что он печатает послойно). В результате этого процесса можно создавать очень сложные формы. Такие формы было бы невозможно (или очень сложно) изготовить другими способами.

3D принтер
Отдельная трехмерная печатная деталь может содержать все необходимые монтажные точки для всех электрических и механических компонентов. При этом способе изготовления каркаса сохраняется незначительный вес изделия. Изготовление робота потребует дополнительной обработки и шлифовки.
Поскольку 3D-печать становится более популярной, цена на детали также снижается. Дополнительно преимуществом 3D-печати является не только то, что ваш дизайн легко воспроизводить, но и им легко делиться. При помощи нескольких кликов мышки можно получить все инструкции по дизайну и файлы САПР.
Полиморф
При комнатной температуре полиморф является твердым пластиком. При нагревании (например, в горячей воде) он становится податливым и может быть сформирован в сложные детали. Затем они охлаждаются и затвердевают в прочные пластмассовые детали.
робот из полиформа
Обычно пластиковые детали требуют высоких температур и необходимы различные формы для изготовления. Изготовление робота таким способом делает их недоступными для большинства любителей. Например, вы можете комбинировать различные формы (цилиндры, плоские листы и т.д.).
Так формируются сложные пластмассовые структуры, которые выглядят как сделанные промышленным способом. Вы также можете экспериментировать с различными формами и достичь с помощью этого материала многого.
Изготовление робота
Конструирование и изготовление робота нужно производить с учетом выбранных материалов и методов. Выполните следующие шаги, чтобы создать эстетичную, простую и структурно обоснованную раму робота меньшего размера.
- Сначала нужно сделать прототип конструкции, выполненный из бумаги, картона или металла.
- Получите все комплектующие, которые потребуются для изготовления робота (электрические и механические), и измерьте их.
- Если у вас нет всех ваших деталей под рукой, вы можете обратиться к размерам, предоставленным производителем.
- Проведите мозговой штурм и набросайте несколько разных конструкций каркаса в общих чертах. Не делайте это слишком подробно.
- После того, как вы выбрали дизайн, убедитесь что компоненты будут хорошо поддерживаться.
- Нарисуйте каждую часть вашего робота в бумаге или картоне со шкалой 1:1 (реальный размер). Вы также можете нарисовать их с помощью программного обеспечения САПР и распечатать их.
- Протестируйте свой дизайн в САПР и в реальной жизни с помощью прототипа бумаги, проверив каждую деталь и соединения.
- Если вы абсолютно уверены, что ваш дизайн правильный, наконец начните изготавливать каркас из выбранных материалов. Помните, дважды измерьте и вырежьте только один раз!
- Перед монтажом рамы проверьте соответствие каждого компонента и, если потребуются, модифицируйте его.
- Соберите свою раму, используя горячий клей, винты, гвозди или любые другие соединения, которые вы выбирали для изготовления своего робота.
- Установите все компоненты на каркас. Так вы только что создали робота с нуля!
Сборка компонентов робота, из приведенного выше списка заслуживает отдельного рассмотрения.
Сборка компонентов робота
На предыдущих уроках вы выбрали электрические компоненты и исполнительные механизмы. Теперь вам нужно, чтобы они все работали вместе. Как всегда, техническое описание и руководства — это ваши друзья, когда вы понимаете, как должно работать ваше роботизированное оборудование.
Подключение двигателей к контроллерам двигателей
Электродвигатель постоянного тока или линейный привод постоянного тока, скорее всего, имеют два провода: красный и черный. Подключите красный провод к клемме M + на контроллере двигателя постоянного тока, а черный — к M-.
Реверсирование проводов приведет только к вращению двигателя в противоположном направлении. У сервомотора, есть три провода: один черный (GND), красный (от 4,8 до 6 В) и желтый (сигнал положения). Контроллер серводвигателя имеет контакты, соответствующие этим проводам, поэтому сервопривод может быть подключен непосредственно к нему.
Подключение аккумуляторов к контроллеру двигателя или к микроконтроллеру
Изготовление робота включает в себя подключение электропитания. Большинство контроллеров моторов имеют две винтовые клеммы для проводов батареи, обозначенных как B + и B-. Если ваша батарея поставляется с разъемом, а ваш контроллер использует винтовые клеммы, вы можете найти разъем для соединения с проводами.
Провода вы можете подключить к винтовому соединению. Хотя вам может потребоваться найти другой способ подключения аккумулятора к контроллеру двигателя.Возможно, что не все электромеханические устройства, которые вы выбрали для своего робота, могут работать при одинаковом напряжении.
Следовательно, могут потребоваться несколько цепей управления батареями или напряжением. Ниже приведены обычные уровни напряжения, используемые в общих компонентах роботизированных платформ:
- электродвигатели постоянного тока — от 3 до 24 В
- стандартные серводвигатели — от 4,8 В до 6 В
- специальные сервомоторы — от 7,4 до 12 В
- шаговые двигатели — от 6 до 12 В
- микроконтроллеры обычно включают регуляторы напряжения — от 3 до 12 В
- датчики — 3,3 В, 5 В и 12 В
- контроллеры постоянного тока — от 3 до 48 В
- стандартные батареи: 3.7V, 4.8V, 6V, 7.4V, 9V, 11.1V и 12V.
Если вы создаёте робота с двигателями постоянного тока, микроконтроллером и, возможно, сервомеханизмом или двумя, то можно легко понять, что одна батарея не может напрямую управлять всем. Прежде всего, мы рекомендуем выбрать батарею, к которой можно напрямую подключать как можно больше устройств.
Батарея с наибольшей емкостью должна быть связана с приводными двигателями. Например, если выбранные вами двигатели рассчитаны на номинальное напряжение 12 В, то ваша основная батарея также должна быть 12 В. Дополнительно вы можете использовать регулятор для питания микроконтроллера на 5 В.
Техника безопасности при работе с аккумуляторами
Внимание: аккумуляторные батареи являются мощными устройствами и могут легко сжечь ваши цепи, если они подключены неправильно. Прежде всегда тройная проверка правильной полярности и возможности работы устройства с энергией, обеспечиваемой батареей.

говорящий робот
Подключение контроллеров двигателя к микроконтроллеру
Микроконтроллер может взаимодействовать с контроллерами двигателя различными способами:
- Стандартный: контроллер имеет два контакта с маркировкой Rx (прием) и Tx (передача). Подключите контакт Rx контроллера двигателя к выходу Tx микроконтроллера и наоборот.
- I2C: контроллер двигателя будет иметь четыре контакта: SDA, SCL, V, GND. Ваш микроконтроллер будет иметь те же четыре контакта, но не обязательно помеченные. Просто подключите их один к одному.
- PWM (Pulse-width modulation): контроллер двигателя будет иметь как вход ШИМ, так и цифровой вход для каждого двигателя. Подключите входной контакт PWM контроллера двигателя к выходному контакту ШИМ на микроконтроллере. Соедините каждый цифровой входной контакт контроллера двигателя с цифровым выходным выводом на микроконтроллере.
- R / C: Чтобы подключить микроконтроллер к контроллеру двигателя R / C, вам необходимо подключить сигнальный контакт к цифровому выходу на микроконтроллере.
Независимо от способа связи логика контроллера двигателя и микроконтроллер должны совместно использовать один и тот же опорный сигнал заземления. Это достигается путем соединения контактов GND (земля) вместе.
В первую очередь нужно соединить контакты одного и того же логического высокого уровня. Этого можно добиться, используя тот же вывод V+ для питания оба устройства. Переключатель логического уровня требуется, если устройства не используют одни и те же логические уровни (например, 3.3V и 5V)
Подключение датчиков к микроконтроллеру
При изготовлении робота обязательно используются сенсорные устройстве -в первую очередь датчики. Датчики могут быть сопряжены с микроконтроллерами аналогично контроллерам двигателя. Датчики (сенсоры) могут использовать следующие типы связи:
- Цифровой: датчик имеет цифровой вывод сигнала, который подключается непосредственно к цифровому выходу микроконтроллера. Простой переключатель можно рассматривать как цифровой датчик.
- Аналоговый: аналоговые датчики производят аналоговый сигнал напряжения, который должен считываться аналоговым выводом. Если ваш микроконтроллер не имеет аналоговых контактов, вам понадобится отдельная аналого-цифровая схема (АЦП). Кроме того, некоторые датчики с требуемой схемой питания обычно имеют три контакта: V+, GND и Signal. Например, если датчик представляет собой простой переменный резистор, вам потребуется создать делитель напряжения для считывания полученного переменного напряжения.
- Стандартный или I2C: здесь применяются те же принципы связи, которые описаны для контроллеров двигателей.
Устройство связи с микроконтроллером
Большинство коммуникационных устройств (например, XBee, Bluetooth) используют последовательную связь. Следовательно требуются те же соединения RX, TX, GND и V+. Важно отметить, что, хотя несколько последовательных подключений могут использоваться совместно на одних и тех же выводах RX и TX, для предотвращения перекрестных помех, ошибок и сбоев в целом требуется надежное управление.
Если у вас очень мало последовательных устройств, часто бывает проще использовать один последовательный порт для каждого из них.
Колеса для двигателей
В идеале, вы выбрали колеса или звездочки, которые предназначены для установки на вал вашего электродвигателя. Возможно, вам придется подгонять отверстия для соединения двигателей, рулевого управления и различных проводов в одну конструкцию.
Электрические компоненты для рамы
При изготовлении робота вы можете смонтировать электронные компоненты на раме робота при помощи множества методов. Прежде всего убедитесь в том, что ваши крепления надежны. Основные методы креплений включают в себя: винты, гайки, двухсторонний скотч, липучки, клей, стяжки и т. д.
Практическая часть
В нашем случае мы будем использовать набор Lego EV3 и для создания каркаса робота нам потребуются только стандартные детали, которые уже входят в состав набора. Изготовление робота на основе набора Лего является прежде всего относительно несложным и достаточно быстрым.
Любому мальчику нравится играть со всяческими роботами.
С малых лет их увлекают простые и смешные роботы, а с возрастом нравятся более эксклюзивные конструкции.
Про роботов существует много мультфильмов и современных экшенов. Они могут быть добродушными или злыми.


Всякому ребенку понравится, если у него среди игрушек будет дома любимый герой. Такую игрушку можно приобрести в магазине, их там большой выбор.

Но намного лучше и интереснее выполнить поделку робота своими руками. Проще всего сделать его из бумажного материала.

Простой бумажный робот
Чтобы создать поделку робот из бумаги необходимо запастись следующими материалами:
- схема робота;
- лист бумаги;
- ножницы;
- клей.

Помимо того может понадобится также картон, иголка или шило, фломастеры и резинки для соединения частей.

На схемах можно увидеть несколько типов линий. Разрез ножницами предусмотрен по сплошной линии. Пунктирные очертания предназначены для сгибания бумаги.

При необходимости сделать отверстия, используете иглу или канцелярский нож до вырезания макета. Для наглядного представления готовой игрушки согните все части по пунктирным линиям, как видно на фото поделки робот.

Склеивать поделку необходимо клеем ПВА, который обладает прочным клеевым свойством и не марает бумагу. Делая сбор основы, необходимо соблюдать все пункты инструкции, иначе робот не сможет двигаться.

Поделку робот из картона делают так:
- сделать распечатку схемы на картоне;
- ножницами вырезать все части схемы, действуя по инструкции;
- вырезанные детали сгибаем по пунктирным линиям;
- соединяем необходимые части с помощью клея;
- делаем сбор всех деталей робота в одну бумажную конструкцию, следуя инструкции.

Робот из спичечных коробков
Симпатичную поделку в виде робота можно выполнить, взяв за основу коробки от спичек.
Зная, как сделать поделку робот, следует подготовить следующие материалы:
- 9 спичечных коробков;
- цветная бумага;
- клей.

Первый делом нужно наклеить цветную бумагу на 5 спичечных коробков (ручки, туловище и голова). На голове из коробка сделать очертания лица используя чёрный маркер.

Остальные четыре спичечных коробка необходимо склеить, а верхнюю часть оклеить любой цветной бумагой.

После сбора всего робота, украсьте его по своему усмотрению. На голове можно приделать аннтенки из спичек. Туловище робота можно приукрасить, наклеив дополнительные частицы.

Геометрическая аппликация своими руками

Предварительно следует сделать необходимые формы фигур на бумаге и вырезать их. Это могут быть различные по форме треугольники, круги или квадраты.

С помощью клеевого карандаша на бумажный лист приклеиваем вырезанные фигуры, делая детскую поделку робот. Маркером рисуем мелкие элементы и разукрашиваем фон.

Такая творческая деятельность научит детей различать цвета и формы, к тому же занятие способствует развитию мелкой моторики.

Робот из фетра
Помимо обычного материала в виде картона, металла или пластика, поделка роботы для детей можно также сделать из фетра. Такая поделка подойдёт для игры маленьким девочкам.
Для создания флисового робота в стиле амигуруми вырезаем из ткани части по размерам:
- 4,5 см для туловища;
- 3,5 см для головы;
- 2,0 см для ног;
- 1,5 см для рук.

Для любой из частей туловища требуется по 6 квадратов флисовой ткани. По необходимости величину заготовок можно повысить для увеличения размера мягкой игрушки.

Делаем выкройки без припусков. Сшиваем части со всех сторон, применяя сметочный шов. В итоге должен выйти кубик. Перед прошиванием последней из сторон, заполняем кубик любым наполнителем.

Внимательно отслеживаем, чтобы из кубика не торчало лишних волокон. Если они есть, их можно обрезать ножницами. При выполнении работы, требуется делать все аккуратно.

Подобным образом сшиваем остальные части туловища робота, после закрепляем между собой клеем. На месте глаз пришиваем бусинки.

По своему усмотрению робота можно украсить бантиком или другими элементами. Маленькую поделку можно сделать в форме магнита, и прикрепить её на холодильник.

Робот из консервной банки с магнитом
Увлекательные игры для развития детей разрешается проводить, пользуясь пустыми консервными банками. Также подойдут небольшие магниты, болтики, крышки из-под бутылок и другие приспособления.
Из каких же элементов можно сделать самостоятельно интересные поделки роботов. Ребёнок от такого будет в восторге. Основная часть поделки — это консервная банка. К ней будут присоединены разные части тела.

Для лёгкой смены деталей на теле, присоедините к ним магниты на клей. Когда ребёнок хочет что-то взять, достаточно лишь поднести маленькую банку к предмету, и всё примагнититься к ней.

Подобное волшебство понравится любому ребёнку и даже взрослому.

Если предоставить творческому чаду необходимый запас материала для опытов, он сможет сделать самых различных роботов. Осталось только запастись терпением и можно приступать к работе.

Смешные роботы — поделки готовы! С такими игрушками дети будут увеличены ими долгое время.

Фото поделки робот





































Читайте также: