
Как сделать пульт управления для квадрокоптера своими руками
Добавил пользователь Валентин П. Обновлено: 04.10.2024
Привет! Давно хотел написать подобную статью с максимально подробной инструкцией как собрать квадрокоптер своими руками. Но сразу скажу, что цена такого квадрокоптера выйдет около 11 тысяч рублей. Это без учета стоимости FPV шлема, аккумуляторов, радиоаппаратуры и зарядного устройства. А полный комплект обойдется вам в примерно 21000 рублей. Подробнее о стоимости квадрокоптера можно, например, почитать здесь и здесь (окончание статьи с итогами). Сборка получилась весьма интересной, шустрой и крепкой. В общем, на текущий момент это мой любимый квадрокоптер.
Краткий обзор комплектующих.
Рама — Transtec Frog Lite II (Купить можно здесь(Aliexpress)
Моторы — Aokfly DR2205 2500kv (Покупаем здесь (Aliexpress)
Полетный контроллер Mamba F405 mini MK2 в стэке с регулятором ESC 4-в-1 (Покупал здесь (Aliexpress)
Приемник радиоаппаратуры Flysky FS-IA6B, модернизированный (добавлены каналы, уменьшен размер и добавлена функция RSSI). О том, как это сделать описано в статье про RSSI. Но я сразу вам рекомендую облегчить задачу и заказать себе что-нибудь миниатюрное типа Fli14 и будет вам счастье.
Сборка рамы.

Вот так выглядит рама нашего будущего квадрокоптера в разобранном виде (слева расположена карма квадрокоптера). Во-первых, вы должны зафиксировать все 4 луча квадрокоптера между двумя центральными пластинами. Сделайте это с помощью 8 винтов из комплекта. 4 самых близких винта проденьте шляпкой вниз и затяните обычной гайкой (капните немного синего фиксатора на резьбовое соединение), 2 крайних правых и два крайних левых (на рисунке это нижние и верхние) — шляпкой вверх и затяните гайками с пластмассовыми втулками. Этим гайкам фиксатор не нужен.
Установка моторов на раму.

Теперь надеваем защиту на лучи и распределяем моторы квадрокоптера по направлению вращения. CW — моторы с вращением по часовой стрелке, CCW — против часовой. Провода должны смотреть в сторону центра квадрокоптера вдоль лучей. Классическая схема, по которой должны вращаться моторы, указана на рисунке. Но так как мы с вами собираем квадрокоптер своими руками, то вы можете выбрать абсолютно противоположный вариант. В общем, это потом легко настраивается.
Прикручиваем их, но не забываем капать фиксатор резьбы на соединения. Винты крепления нужны с длиной резьбовой части 7 мм. Этот квадрокоптер имеет толщину лучей 4 мм, плюс защита торцов 1 мм, плюс 2 мм само соединение. Итого 7 мм.
Главное не переборщите с длиной и перед затягиванием убедитесь в том, что винт не повредит обмотку мотора.
Установка регулятора оборотов 4-в-1.


Чтобы правильно сориентировать регулятор оборотов, достаточно глянуть на обозначения номеров моторов на углах платы и надеть плату на 4 центральных винта. Контакты +/- должны оказаться сзади. Зафиксируйте плату нейлоновыми стойками, идущими в комплекте со стеком Mamba F405. Далее уже приступаем непосредственно к пайке компонентов.
Прежде чем паять моторы к регулятору, отмеряем длину проводов до ближайших 3 контактов (относительно каждого мотора/луча) с небольшим запасом, отрезаем. Зачищаем провод где то на 3 мм, лудим. Лудим все контакты на плате регулятора. Дальше припаиваем провода от моторов также как на рисунке. Провода от моторов припаиваются к трем соответствующим этому мотору площадкам в любом порядке.

К контактам +/- припаиваем коннектор XT-60 как показано на рисунке. На этом можно считать работу с силовой частью квадрокоптера завершенной.
Теперь пришло время снабдить наш квадрокоптер глазами, ушами и мозгом.
Подключение FPV системы, приемника и пищалки к полетному контроллеру квадрокоптера.
Подключение FPV камеры.

Все FPV камеры, так или иначе, практически не отличаются друг от друга способом подключения к полетному контроллеру. Чаще всего из камеры выходят 3 провода: черный — минус питания камеры (земля), красный — плюс питания камеры, желтый — видеосигнал. Теперь давайте разберем наш случай: камера Foxeer Predator 4 поддерживает напряжение питания 5-40 вольт. Наш полетный контроллер имеет на борту преобразователь напряжения на 5 и на 9 вольт. Например, будем использовать 9 вольт. Все контакты на плате Mamba F405 удобно распределены по группам для того, чтобы было легче паять (смотрите картинку). Хочу отметить, что я прежде всего припаиваю всю периферию, а уже потом устанавливаю плату на нейлоновые стойки. Делаю я так для правильной пайки. То есть, другими словами, провода продеваем в отверстия снизу, а припаиваем сверху, а не как многие блогеры, суют провод в отверстие и тут же жарят изоляцию. Дальше на фото будет видно, что я имею ввиду.
Вот мы присоединили камеру, теперь полетный контроллер уже умеет принимать сигнал от нее и накладывать различную информацию на картинку (OSD-on screen display), но еще не умеет передавать изображение в FPV очки или шлем. Для этого нужен видеопередатчик.
Подключение видеопередатчика.

Выбранный мной передатчик Foxeer Clear/ClearTX2 имеет шесть контактов.
Красный — плюс питания передатчика, черный — минус питания, зеленый — SmartAudio (позволяет управлять мощностью с пульта радиоаппаратуры), желтый — вход видеосигнала из ПК после наложения на него информации (OSD). Есть еще черный и белый провода для питания камеры, но нам они в этой сборке не нужны. Обрезаем коннектор со стороны ПК, зачищаем, лудим провода и припаиваем согласно рисунку. Все провода желательно скручивать для того, чтобы уменьшить воздействие помех от регулятора оборотов.
Подключение приемника Flysky FS-iA6b по протоколу i-bus.
Ну, вот мы и подобрались к моменту компоновки всех деталей нашего самодельного квадрокоптера.
Окончательная сборка квадрокоптера.
Буду приводить картинки и прокомментирую все дальнейшие действия, я думаю, что все будет понятно.

Теперь несколько слов о недостатках этой сборки и о том, как я вышел из данной ситуации. Главный недостаток — это размер приемника! (мне просто надо было его куда то пристроить). В самом начале статьи я рекомендовал вам выбрать миниатюрный приемник. Но даже с такими его размерами, я постарался не испортить внешний вид квадрокоптера. Я спроектировал и распечатал на 3д принтере крышку (скачать stl файл), под которую спрятал видеопередатчик. Кроме того, удобно закрепил антенну на ней. По-моему получилось неплохо…
Прошивка и настройка самодельного квадрокоптера.
Ну вот, мы своими руками собрали квадрокоптер, осталось его настроить.
Первым делом устанавливаем необходимые приложения: Betaflight Configurator и BLHeli Configurator. Первый нужен для прошивки и настройки полетного контроллера, а второй для настройки регулятора оборотов. Оба конфигуратора можно установить двумя способами: Во-первых, если у вас браузер Chrome, то их можно установить в качестве расширений для него. Во-вторых, можно установить их как отдельные приложения. Ссылки ниже:
Прошивка.
Настроим квадрокоптер своими руками.
Изменение направления вращения моторов квадрокоптера.
- Закрываем Betaflight.
- Открываем BLHeli Configurator.
- Подключаем ПК к компьютеру и жмем Connect (аккумулятор должен быть присоединен к квадрокоптеру)
- Нажимаем Read Setup, должна появиться вот такая информация
- Esc 1, Esc 2 и так далее соответствуют номерам наших моторов 1,2,3 и 4. Например, нам надо изменить направление вращения мотора №1. В выпадающем списке Motor Direction меняем значение Normal на Reversed. Теперь мотор будет крутиться в противоположную сторону. Точно так же делаем для всех моторов, которым надо изменить направление вращения.
- Жмем Write Setup. Закрываем BLHeli Configurator. В общем, вы еще раз можете проверить, все ли вы правильно сделали, в Betaflight.
Настройка радиоаппаратуры Flysky.
Как проверить, требуется ли делать реверс основных каналов в аппаратуре? ![]()




Как вы можете видеть, в моем случае ничего менять не пришлось. На этом этапе будьте аккуратны и не включите реверс третьего канала (газ). Это может привести к тому, что при включении квадрокоптера он даст газ на полную!
AUX каналы.
Под AUX каналами в радиоаппаратуре подразумевают всякие дополнительные тумблеры и крутилки, которые используют для включения различных функций, а также управляют полетными режимами квадрокоптера. У нашего приемника Flysky FS-iA6b 6 каналов. Но всего 2 дополнительных. Допустим, что у нас один дополнительный канал будет отвечать за включение пищалки (крайний левый тумблер), а второй (трехпозиционный переключатель) — за изменение полетного режима. В аппаратуре это делается так:



Здесь я тумблер пищалки (SwA) переназначил на 6 канал (AUX 2), а трехпозиционный переключатель (SwC) установил на 5 канал (AUX 1).
Таким образом, при включении левого тумблера, будет звучать сигнал зуммера. Это полезная функция, которая помогает искать квадрокоптер в траве, если тот, например, упал.
Трехпозиционный переключатель позволит нам выбрать полетный режим: выключенное состояние — Disarm (моторы остановлены), вторая позиция — Arm (Моторы вращаются) и Angle (режим стабилизации), третья позиция — Arm и Acro (акробатический режим). Про режимы я советую вам почитать статьи на просторах рунета, в рамках этой статьи невозможно передать всю информацию по этой теме.
Настройки Failsafe. Квадрокоптер своими руками.
Failsafe — это очень важная функция, миссия которой, сохранить квадрокоптер, сделанный своими руками, в случае потери связи от радиоаппаратуры, а также чужое имущество.
На стороне аппаратуры мы должны настроить Failsafe хотя бы на одном канале. Рекомендую 3 (газ):





На стороне полетного контроллера делаем точно так же, как на картинке:
Работает функция по следующему алгоритму. Например, потеряна связь, квадрокоптер на 3 секунды включает режим стабилизации, тем самым выпрямляет его, затем отключает моторы и включает зуммер (пищалку). Не игнорируйте эту настройку. А еще лучше не выходите в поле, пока не проверили работу функции дома без пропеллеров.
Настройка OSD

На этой вкладке мы долго задерживаться не будем, так как, настройка OSD — это личные предпочтения каждого пилота.
Здесь вы смело можете экспериментировать с той информацией, которую хотите видеть на экране вашего FPV шлема или очков (ставя или убирая галочки), а также с месторасположением их на картинке (просто передвигая надписи). Обычно самым важной информацией для FPV пилота квадрокоптера является израсходованная емкость аккумулятора. Зная ее, вы вовремя посадите свой квадрокоптер и сохраните и его и недешевые аккумуляторы.
Вот вроде бы и все. Перед первым запуском квадрокоптера с установленными пропеллерами, еще раз проверьте следующие моменты:
Во-первых, корректность работы каналов (особенно газа!)
Во-вторых, Failsafe! Для этого достаточно отключить аппаратуру, и посмотреть, работает ли квадрокоптер по нашему сценарию.
В-третьих, я мог, что-то упустить из виду и не описать в статье какую-нибудь мелочь. Пишите комментарии, я постараюсь быстро ответить.
UPD: Как настроить датчик тока на полетном контроллере квадрокоптера? Читайте здесь.
Электроника квадрокоптера
ЭКС – электронный контроллер скорости (контроллер оборотов двигателя)
Бесколлекторные двигатели являются мультифазными (как правило — трехфазными), так что не получится запустить их, просто подключив к источнику постоянного тока. Для этого используются специализированные ЭКСы (но не те, что проводились революционерами), а гораздо более технологичные и миниатюрные. ЭКСы генерируют серию (в зависимости от количества фаз) высокочастотных сигналов, которые и заставляют вал мотора вращаться. В зависимости от потребления двигателя, ЭКС должен иметь соответствующую пропускную способность по силе тока.
По сути, ЭКС является контроллером мощности, который преобразует ток источника питания в трехфазный ток для питания бесколлекторных двигателей квадрокоптера. Каждый ЭКС управляется отдельно PPM — сигналами, подобными PWM – модуляции.
ПРИМЕЧАНИЕ ПЕРЕВОДЧИКА: PPM (Pulse-position modulation, русск: Фазово — Импульсная модуляция) — распространенный метод кодирования сигналов, передаваемых дистанционно в системах связи с низкими требованиями к помехоустойчивости.
Метод PPM представляет собой последовательность имеющих постоянную длительность импульсов, которые разнесены друг от друга на разные временные периоды. Величина периодов между сигналами и задает кодируемые значения. Группы импульсов объединяются в так называемые фреймы (пакеты).
PWM – модуляция (Pulse-width modulation , русск: Широтно-Импульсная Модуляция, русск. разг: ШИМ) является методом управления средним значением напряжения на нагрузке изменением скважности (соотношения частоты повторения к длительности) импульсов. Таким образом, чем длиннее сигналы, тем большее напряжение получает потребитель.
Частота сигналов может варьироваться в широких пределах, особенно в сложной системе, которую представляет собой квадрокоптер. Система управления для обеспечения необходимого числа оборотов двигателей (а значит, и стабильности полета нашего аппарата) должна уметь обрабатывать команды датчиков с частотой до 200-300 герц, то есть до 300 раз в минуту менять скважность импульсов на каждом из двигателей. Отдельные модели ЭКС могут управляться через систему управления I2C, но их цена пока неоправданно высока.
ПРИМЕЧАНИЕ ПЕРЕВОДЧИКА: I2C (англ: Inter-Integrated Circuit) последовательная шина данных для связи интегральных схем, использующая SDA и SCL (двунаправленные линии связи). Используется для соединения низкоскоростных переферийных устройств с управляющими модулями. Широко применяется для управления устройствами на базе микроконтроллеров.

Вот он какой, ЭКС…
Одним из важнейших критериев при выборе ЭКСа является величина силы тока, которая может коммутироваться на потребителе, в нашем случае — двигателе. Автор рекомендует использовать ЭКСы, которые могут коммутировать ток не ниже 10 Ампер, а в случае использования мощных двигателей – не ниже величины их пикового потребления. Вторым важнейшим фактором является программная совместимость контроллеров с платой управления. Это значит, что некоторые модели ЭКСов позволяют использовать тайминги (временные периоды) управления, которые выходят за пределы стандартного для моделизма диапазона от 1 до 2 мс. Это предоставляет дополнительные возможности при самостоятельной разработке модулей управления квадрокоптером.
Источник питания
Для питания систем квадрокоптера автор рекомендует LiPo (литий — полимерные) аккумуляторы по двум причинам. Во – первых, они легче по весу, а во – вторых, имеют ток отдачи, как раз подходящий для наших проектов. Возможно использование NiMH (никель — металгидридных) аккумуляторов, но они имеют значительно больший вес, хотя и меньшую стоимость.

Литий — полимерный аккумулятор
Напряжение
LiPo источники питания поставляются как в виде отдельных элементов со стандартным выходным напряжением 3.7 Вольт, так и в виде батарей из более чем 10 отдельных элементов сообщим напряжением 37 Вольт и выше. Популярным выбором для любителей квадровертостроя являются т.н. 3SP1 – батареи, то есть три последовательно соединенные элемента с суммарным выходным напряжением 11.1 Вольт.
Емкость источников питания
Для выбора емкости батареи, вы должны принять во внимание следующие аспекты:
- Какое потребление у ваших двигателей?
- В каком полетном времени вы заинтересованы?
- Какое влияние окажет вес батареи на общий конструкционный вес аппарата?
Хорошим тоном считается, если ваш квадрокоптер при 4 несущих винтах модели EPP1045 и четырех двигателях с Kv рейтингом, равным 1000, при полной мощности двигателей будет держатся в воздухе количеством минут, равное емкости источника питания аппарата в Ампер/Часах. То есть, при емкости батареи квадрокоптера в 4000 мА/Ч, в режиме полной мощности двигателей аппарат должен держатся в воздухе 4 минуты при полезной массе в 1 кг. При учете расхода заряда батарей, это дает 16 минут полета в режиме висения.
Степень разрядки батарей
Еще одним важным фактором является степень разряда C. Вместе с емкостью батареи, эта переменная определяет максимальную силу тока, которая может быть получена с источника питания. Максимальный ток отдачи источника питания рассчитывается по следующей формуле: Мто = емкость батареи x степень разряда.
Пример: батарея имеет степень разряда 30С и емкость в 2000 мА/ч. Максимальный ток разряда, который вы можете получить с указанной батареи, по приведенной выше формуле составляет 60 Ампер. Таким образом, при конструировании вы должны принять во внимание, что максимальный ток потребления всех систем вашего квадрокоптера не должен превышать 60 Ампер.
ИИК – инерционный измерительный комплекс
Инерционный измерительный комплекс (далее — ИИК) — совокупность электронных систем и датчиков, которые считывают и передают управляющему модулю информацию о текущей скорости, ориентации и силах, воздействующих на летательный аппарат.
ИИК, как правило, представляет собой комбинацию 3-координатного акселерометра с 3-координатным гироскопическим модулем, формируя систему датчиков с 6 степенями свободы. Для увеличения курсовой устойчивости, указанную систему иногда дополняют 3-координатным магнитометром, в результате чего система получает в общей сложности 9 степеней свободы.
ПРИМЕЧАНИЕ ПЕРЕВОДЧИКА: Магнитометр (цифровой компас) нужен для ориентации по сторонам света, чтобы узнать, куда идти с какой стороны от нашего аппарата расположен север.
Принцип действия ИИК
Акселерометр (датчик ускорения), предназначен для измерения разности ускорения аппарата и гравитационной составляющей. Так как акселерометр имеет три оси измерения, мы можем использовать его для определения текущей ориентации нашего квадрокоптера.
ИИК с 6 степенями свободы
Гироскопический датчик применяется для измерения угловой скорости, то есть скорости вращения квадрокоптера вокруг каждой из трех осей.
Что будет, если в конструкции мы используем только акселерометры?
В случае использования в нашем квадрокоптере исключительно датчиков ускорения, мы сможем определять ориентацию аппарата с привязкой к поверхности земли. Однако, акселерометр является очень чувствительным и порой неточным датчиком, и из-за вибраций от двигателей, может дать неверные показания. Разумеется, это приведет к потере ориентации. Для решения этой проблемы используются гироскопические датчики. В результате обработки показаний датчика ускорения и гироскопов, мы можем учесть помехи от вибрации при определении реального положения.
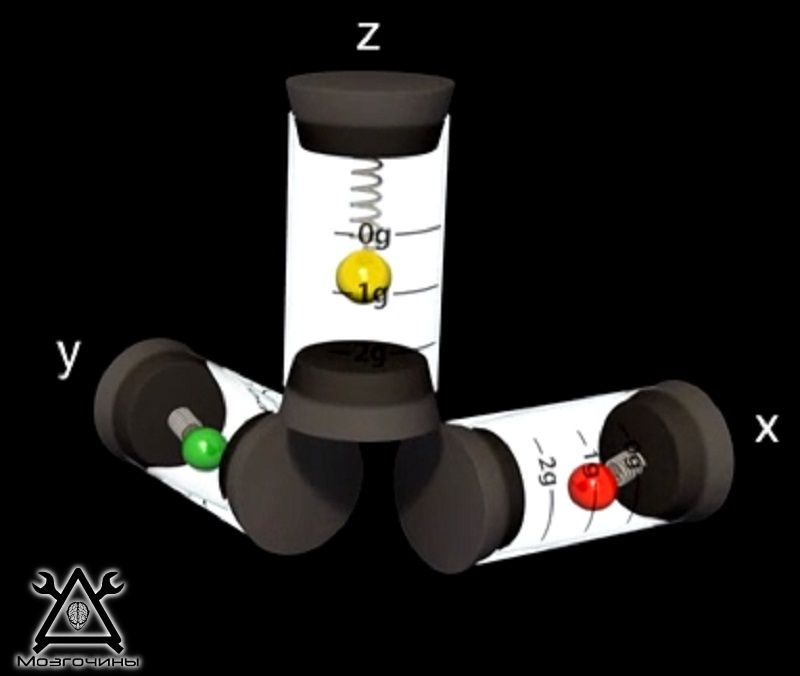
Инерционный датчик Так работает 3х-координатнй датчик ускорения
Что будет, если в конструкции мы используем только гироскопы?
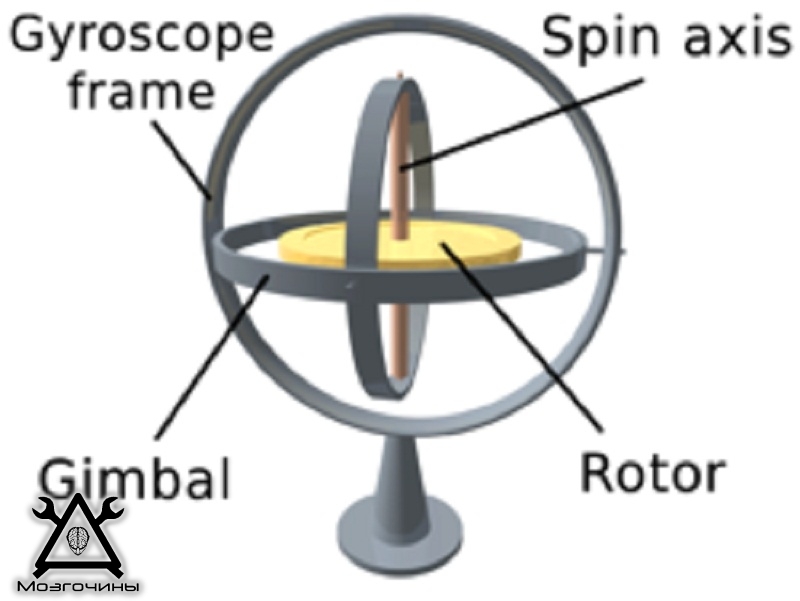
А вот гироскопический датчик
Если гироскопический датчик предоставляет нам информацию о поворотах аппарата, почему бы не использовать в конструкции только их?
Гироскопы имеют тенденцию накопления курсовой ошибки. Это приводит к тому, что во время вращения, гироскопический датчик точно показывает угловую скорость, но после остановки не обязательно обнуляет свои показания. Таким образом, при использовании исключительно гироскопических датчиков, вы довольно быстро заметете, что их показания медленно изменяются (дрейфуют) даже после остановки вращения. По этому, для точной ориентации вашего квадрокоптера в пространстве, вам необходимо использовать два типа датчиков.
Акселерометр не может фиксировать рысканья по курсу так же, как изменения углов крена и тангажа. Для этого в конструкцию квадрокоптеров иногда вводят магнитометр.
Магнитометр измеряет направление и величину магнитного поля. Он в состоянии определить направление движения нашего аппарата и направление на Северный и Южный полюсы. Угол отклонения от направления на магнитный полюс Земли с учетом угловых скоростей поворотов по горизонту, полученных от гироскопического датчика, используется для вычисления стабильного курсового угла.
Автор заявляет, что пытается минимально углубляться в теорию, однако обещает в последующих пособия предоставить больше деталей.
Выбор ИИК
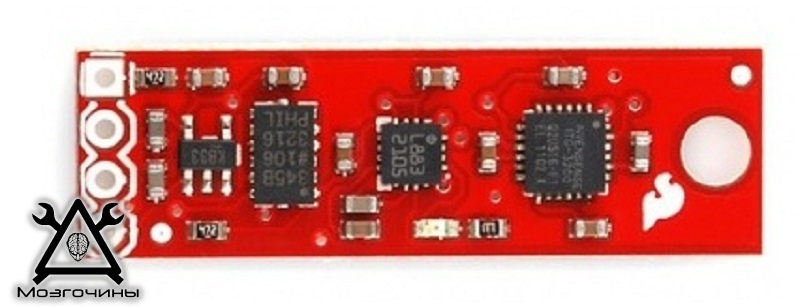
Несмотря на то, что на рынке предоставлены все три типа датчиков, автор рекомендует приобрести специализированные наборы, где датчики с 6-ю или даже 9-ю степенями свободы собраны на одной плате.
Плата датчиков передает показания центральному вычислительному блоку через I2C или в аналоговом виде. Цифровые системы передачи данных более удобны для разработчика и конструктора, однако, значительно дороже аналоговых.
Выбор ИИК непосредственно определяет вычислительный блок. Который вы сможете использовать. Так что, покупая ИИК, прочитайте инструкцию к вашей системе управления. Некоторые центральные вычислительные модули имеют встроенные сенсоры.
Вот примеры ИИК, которые можно приобрести через Интернет:
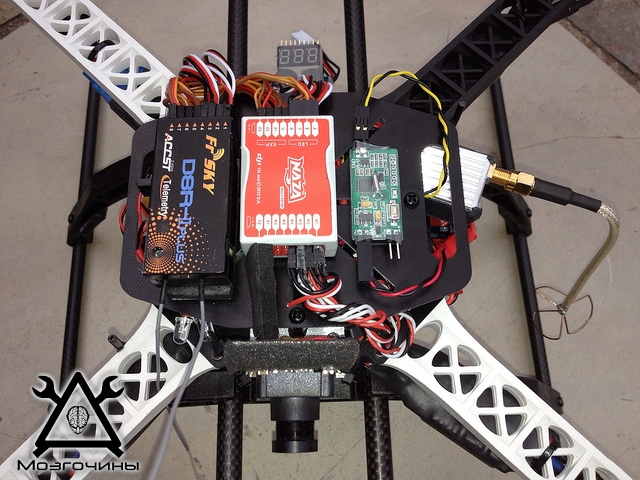
А вот ИИК с системой обработки показаний датчиков:
Система управления полетом (центральный вычислительный модуль)
В процессе создания квадрокоптера вы можете приобрести специализированный контроллер, либо собрать его самостоятельно из отдельных компонентов. Некоторые из таких контроллеров даже оборудованы встроенными сенсорами, в то время как другие требуют приобретения специальных плат с датчиками.
По ссылке ниже, приведен сравнительный перечень характеристик готовых к использованию ЦВМ:
AeroQuad MEGA Shield The AeroQuad board является платой расширения для микроконтроллеров на базе Arduino, и требует дополнительно платы Sparkfun 9DOF, которая также продается в формате платы расширения (шилд).
Плата ArduPilot, так же как и , построена на базе микроконтроллера ATMEGA328. Подобно AeroQuad, этот модуль не оборудован собственными сенсорами и для получения радости полета вам необходимо приобрести плату расширения ArduIMU.
ЦВМ OpenPilot – еще более продвинутая система управления квадрокоптером, построенная на базе процессора ARM Cortex-M3 с тактовой частотой 72 мегагерца. Плата имеет встроенный акселерометр и гироскопический датчик. Отдельно необходимо отметить программное обеспечение, которое идет в комплекте с платой. Оно позволяет откалибровать датчики, и, при наличии GPS – модуля, задавать маршрутные точки для полета вашего квадрокоптера.
Центральный вычислительный модуль своими руками
Автор утверждает, что при наличии некоторых навыком и прямых рук, любой энтузиаст может изготовить ЦВМ квадрокоптера своими руками. Например, с использованием микроконтроллера Ардуино. В то же время, эти ценные навыки автор обещает предоставить в будущем.
Система радиоуправления
Квадрокоптеры могут управляться разными способами, но наиболее распространенным, является управление по радио, в режимах Темп (аэробатика) и Автостабилизация. Разница состоит в способе интерпретации контрольной системой квадрокоптера текущего положения аппарата и команд, полученных с пульта управления.
В режиме аэробатики для управления квадрокоптером используются только показания гироскопического датчика. Пульт управления используются для контроля тягой двигателей и крена по всем трем осям. Однако, если вы бросите управление квадрокоптером, его автоматическая стабилизация по горизонту проведена не будет. Эта особенность полезна при аэробатике для небольшого доворота квадрокоптера, после чего он не совершит автоматического компенсирующего маневра.
Разумеется, режим аэробатики для начинающих может оказаться излишне сложным и автор рекомендует начать с режима Автостабилизация. Для поддержания ориентации квадрокоптера в этом режиме используются все имеющиеся в наличии сенсоры. Для поддержания баланса, будет осуществляться постоянное и симметричное управление тягой каждого двигателя. Вы же, будете управлять курсом и движением квадрокоптера по любой оси с использованием джойстиков пульта управления. Например, для движения вперед, вам достаточно будет передвинуть вперед один из джойстиков для изменения угла тангажа. После того, как джойстик вернется в нулевую позицию, квадрокоптер автоматически выправит крен и стабилизируется относительно поверхности земли.
Дополнительные компоненты
После покупки все необходимых частей, наличия все еще живого квадрокоптера и желания продолжать эту бодягу, вы можете попробовать использовать дополнительные компоненты, такие, например, как GPS – модуль, ультразвуковой датчик, барометр и др. Все это может повысить летные характеристики и удобство использования вашим квадрокоптером.
GPS при помощи спутников выдает точную информацию о месте нахождения вашего квадрокоптера. Это информация может использоваться для расчета пройденного пути и выяснения маршрута движения. Особенно полезной данная функция может быть для полностью автономных квадрокоптеров, которым необходимо учитывать текущую позицию для выбора дальнейшего направления движения.
Ультразвуковой датчик измеряет дистанцию до земли, то есть текущую высоту полета. Это весьма полезно при полете на заранее заданной высоте без контроля пилота. Как правило, ультразвуковые датчики действуют в диапазоне дистанций от 20 см. до 7 метров.
ПРИМЕЧАНИЕ ПЕРЕВОДЧИКА: также используются лазерные датчики расстояния (ЛИДАР), наиболее доступные из которых работают в диапазоне от 3 см. до 5 метров.
Если же вы решили забраться повыше – вам необходим барометр. Этот датчик измеряет влажность и давление воздуха в зависимости от высоты полета. Если же квадрокоптер находится на малой высоте поблизости от земли (где изменение этих фактора не так сильно выражено), барометр теряет свою эффективность.
Заключение
Автор надеется, что ознакомление с его статьей поможет читателям определится с назначением и особенностями функционирования каждой из частей квадрокоптера и поможет выбрать необходимые компоненты для его постройки.
Вы хотите попробовать самостоятельно собрать своего первого летательного робота? Тогда эта статья для вас.
К написанию статьи послужила встреча с одним из моих заказчиков, пришедших с задачей разработать для него оригинальное устройство для управления водным катером. И в процессе общения я услышал фразу, о том, что ему не удалось найти информацию о разработках простого для повторения в домашних условиях коптера, желательно на основе Ардуино-контроллера. И я вспомнил, что в свое время, когда я делал курс по летательным роботам для освоения моими учениками, я не мог так же найти ничего путного, лишь какие-то фейковые статьи и видео о якобы летающих дронах на Ардуино. Попадались лишь статьи-рекомендации и видео по сборке дорогих дронов на основе уже существующих полетных контроллеров.
Почему такая ситуация с этой, казалось бы простой задачей?
Все дело в том, кто заказчик и кто платит за информацию. Если платит производитель готовых дронов, - то понятно, он будет стимулировать продвижение своей продукции через блогеров, лидеров мнений в интернет-среде. Они будут рассказывать как хорошо он летает, управляется и просто собирается. С программированием вообще не нужно заморачиваться, нужно лишь подключить и все работает. Да, есть конечно же загружаемые программы для полетных контроллеров, написанных на С++, но практически весь этап программирования заключается в правильной установке заданных переменных для движений и выбора подключаемых модулей.
Вы не найдете в выдаче информации о самоделках, поскольку их некому продвигать и поднимать в поисковой выдаче, а рекламировать свои статьи из любителей-разработчиков никто не будет.
Есть категория блогеров, рассказывающих о своих проектах на основе Ардуино, но и у них эта категория летательных дронов так же не встречается.
Весь путь от копания этой информации до создания собственного полетного контроллера и сборки летательного робота на основе Ардуино-контроллера я прошел. Ребята собрали своих дронов, но не у всех он получился. Проект удался. Выводы сделаны.

Квадрокоптер своими руками — сложная, но вполне осуществимая задача для людей, которые имеют базовые представления о радиотехнике. Существует несколько основных вариантов домашнего конструирования дрона.
Что нужно для сборки квадрокоптера
Набор деталей и расходных материалов может меняться в зависимости от того, какой именно дрон нужно сделать своими руками. Но базовый список элементов выглядит следующим образом:
- рама, на которой будут закреплены все остальные детали;
- четыре специальных двигателя для дрона;
- четыре пропеллера;
- четыре регулятора оборотов для винтов;
- два красных и два черных провода в силиконовой оболочке для моторов;
- силовой разветвитель 3,5 мм;
- литий-ионный аккумулятор — один или несколько;
- плата управления;
- зарядное устройство для батарей питания;
- пульт радиоуправления.
Чтобы собрать квадрокоптер из запчастей, практически все специфические детали можно приобрести в Интернете, например, через сервис АлиЭкспресс.
Чертежи и схемы квадрокоптеров
Чертежи для сборки квадрокоптера могут незначительно различаться между собой. Детали зависят от габаритов собираемого своими руками дрона, от его формы и конструктивных особенностей. Но базовый чертеж обычно предлагает сделать маленький квадрокоптер на крестообразной силовой раме с размерами 363 на 363 см. Параметры корпуса при этом составляют около 107 на 107 см, в таком случае в дроне без проблем размещаются основные детали.

Стандартно самодельные дроны собирают на рамах из четырех лучей
Структурная схема квадрокоптера выглядит очень просто. В центре конструкции на силовой раме всегда располагается электронная плата управления. По четырем углам на равном расстоянии друг от друга нужно поставить двигатели с закрепленными на них пропеллерами. В корпус в центре конструкции монтируют также элементы питания и радиодатчики для удаленного пилотирования.

Регуляторы оборотов на лучах необходимы для дронов, предназначенных для маневрирования
Важно! При сборке дрона своими руками нужно следить за тем, чтобы основная масса конструкции приходилась на центр и не смещалась в ту или иную сторону.
Как сделать самодельный квадрокоптер из бумаги
Простейший вариант сборки предлагает выполнить корпус аппарата из плотной бумаги. Такой квадрокоптер своими руками для начинающих будет очень легким, и управлять им в ветреную погоду не получится. Зато и больших расходов он тоже не потребует.
Сборка корпуса из бумаги
Прежде всего, при сборке бумажного дрона необходимо подготовить шаблон. Его можно нарисовать самостоятельно по одному из найденных чертежей, но гораздо проще скачать готовый вариант.

Бумагу для дрона нужно брать плотную, чтобы она не сминалась в процессе использования
Из готового шаблона острыми ножницами или ножом вырезают отдельные детали. После этого приступают к склеиванию частей — использовать можно ПВА или Момент по желанию. Важный нюанс состоит в том, что клея нужно наносить совсем немного и сразу же убирать его излишки. Даже небольшие застывшие капельки в конечном итоге влияют на массу и балансировку коптера.
Промазанные детали прикладывают друг к другу и слегка прижимают. После этого корпус оставляют сохнуть, а потом визуально проверяют качество сборки.
Установка электронной начинки
Чтобы бумажный дрон взлетел, на него необходимо монтировать электронику. Пошаговая инструкция для квадрокоптера своими руками выглядит так:
- сначала в центральной части рамы снизу устанавливают чипами вверх полетный контроллер с микропроцессором, полевыми транзисторами и сенсорами;
- затем при помощи той же клейкой ленты по углам располагают моторы и подводят к ним провода, закрепив их скотчем во избежание наматывания на винты;
- в центре рамы на двусторонний скотч ставят аккумулятор и соединяют его с моторами.
Готовый квадрокоптер своими руками из подручных материалов можно испытывать при помощи заранее приобретенного пульта управления.

Бумажный коптер требует использования максимально компактных и легких деталей при сборке
Как сделать мини-дрон своими руками в домашних условиях
Небольшой квадрокоптер можно смастерить своими руками из нескольких покупных деталей, клея и палочек от мороженого-эскимо. На его сборку понадобится потратить около 15 минут времени и минимум усилий.
Сборка силовой рамы дрона
Проще всего использовать для сборки самодельной рамы для квадрокоптера палочки от мороженого. Их склеивают между собой горячим или холодным клеем в виде решетки.

При сборке рамы дрона из палочек нужно следить, чтобы конструкция была пропорциональной
Установка электронной части и моторов
При помощи того же клея в центральной части рамы закрепляют аккумулятор, а по углам ставят четыре двигателя с мини-винтами. Под батареей питания закрепляют электронную плату, отвечающую за прием сигнала с пульта, и соединяют ее со всеми моторами. Чип контроля подключают также к аккумулятору.

После закрепления ножек мини-дрона нужно убедиться, что конструкция стоит на поверхности ровно
Проверка работоспособности
Собранный своими руками бюджетный квадрокоптер устанавливают на ножки, аккуратно прижимают отверткой к поверхности и нажимают на кнопку старта на пульте. Если пропеллеры благополучно закрутятся, дрон сделан успешно и сможет взлететь при проведении первого настоящего испытания.
Внимание! Мини-коптер, выполненный своими руками, не будет поддерживать регулировку оборотов и смену направления движения. Предназначена такая простая модель только для взлета и посадки.
Как сделать квадрокоптер с камерой своими руками
В домашних условиях реально провести сборку не только примитивного дрона, но и профессионального квадрокоптера своими руками. Для этого понадобится приобрести базовые детали — аккумуляторы, контроллер полета, моторы, провода и пульт ДУ. Также нужно купить камеру — компактную и легкую, но с хорошим разрешением.
Сборка рамы
Бумажная и картонная рама для коптера с камерой не подойдет, конструкция будет слишком тяжелой. При желании можно заказать готовую основу для дрона в Интернете. Но очень просто выполнить сборку и своими руками, например, из водопроводных пластиковых труб или легких алюминиевых профилей. Скрепляют детали между собой при помощи винтов или фитингов. На концах лучей рамы снизу можно сразу же прикрутить ножки, на которых будет стоять дрон.

Алюминиевая рама достаточно легкая и при этом очень прочная
Установка моторов
На каждом из лучей рамы необходимо установить по мощному компактному мотору. Закрепить их можно при помощи термоклея или резьбы. На верхнюю часть двигателей надевают винты. Лопасти для квадрокоптера своими руками обычно не делают — это требует использования фрезеровочного станка. Купить готовые пропеллеры намного проще и практичнее.
Сборка электроники
В центральной части аппарата устанавливают плату управления. Крепить микросхему лучше всего горячим клеем. Двусторонний скотч для массивных конструкций используют реже, поскольку он не обеспечивает надежной сцепки.

Контроллер для дрона с камерой следует выбирать подороже, с датчиками и режимами полета
Установка камеры
Для сборки летающего дрона своими руками для съемки оптимально использовать GoPro — легкую, небольшую по размерам экшн-камеру. В верхней или нижней части рамы для нее необходимо сделать специальную пенопластовую платформу, которая станет гасить вибрации от корпуса при полете. Камеру для надежности плотно закрепляют резинками.
Камеру на дроне можно закрепить в любой точке с хорошим обзором и минимумом вибрации
Установка регуляторов оборотов и подключение проводов
На данном этапе квадрокоптер для видеосъемки своими руками почти готов. Остается только соединить регуляторы оборотов с моторами и контроллером, а потом подключить плату управления к батареям питания. Также нужно не забыть вывести на полетный чип провода от камеры.

Моторы дрона с камерой в сумме должны давать подъемную силу, превышающую вес аппарата
Как сделать гоночный квадрокоптер своими руками
Сборка гоночного дрона по сути ничем не отличается от конструирования обычного квадрокоптера. Разница состоит в подходе к выбору деталей — нужно уделить особое внимание моторам, раме и винтам.
В случае с гоночным дроном основу лучше приобретать готовую. Она обеспечит оптимальную балансировку аппарата. Хорошим вариантом для сборки станет легкая и прочная рама из карбона со стандартными четырьмя лучами.
Сборка моторной части
Моторы для гоночного коптера закрепляют на лучах рамы винтами в специальных отверстиях. Двигатели должны быть достаточно мощными — например, хорошо подойдут 2205-2600 KV. В центральной части лучей устанавливают регуляторы оборотов и соединяют проводами с моторами. Винты для сборки гоночного дрона можно выбирать с двумя или тремя лопастями — первые дадут большую скорость, вторые облегчат процесс маневрирования.

Регулировка оборотов гоночному коптеру нужна обязательно, иначе он не сможет маневрировать
Установка электронной части
Стандартным способом на центральной пластине рамы закрепляют плату управления. Ее можно посадить на горячий клей или просверлить отверстия и зафиксировать небольшими винтами. В последнем случае конструкция после сборки получится надежнее. К раме прикрепляют приемник сигнала, который будет передавать команды на плату управления. Аккумулятор традиционно монтируют в нижней части устройства отдельно от микрочипа.

Камеру в гоночном дроне фиксируют в специальном гнезде на готовой раме
Подсоединение проводов
На финальном этапе сборки остается подключить к плате управления провода, отходящие от камеры и моторов. Сам микрочип при этом соединяют с аккумулятором.

При прокладке проводов нужно следить, чтобы они оставались подальше от лопастей дрона
Как сделать квадрокоптер для человека своими руками
Дрон для человека — пока что крайне редкий, небезопасный и дорогостоящий вариант для самостоятельной сборки. Общедоступных инструкций того, как самому в домашних условиях сделать квадрокоптер с огромной подъемной силой, пока не существует, поскольку обладателей таких аппаратов очень немного.
Однако краткий алгоритм создания грузоподъемного дрона можно описать, опираясь на стандартную схему.
Для сборки самодельного большого квадрокоптера подойдет только металлическая рама из стали, карбона или прочного алюминия. Другие конструкции просто не смогут поднять всю электронику и владельца дрона.

Болты для скрепления элементов рамы должны быть рассчитаны на нагрузку свыше 100 кг
Установка моторов и регуляторов оборотов
Двигатели для мощного квадрокоптера своими руками устанавливаются на лучах силовой рамы. Принципиальное внимание нужно уделить их производительности — суммарная тяга должна быть не меньше 120 кг. Добиться такого показателя реально при помощи восьми бесколлекторных моторов на 3 кВт каждый. К двигателям необходимо докупить регуляторы не менее 80 А. Детали соединяют между собой при сборке проводами, а к раме крепят исключительно на прочных винтах.

Для мощного дрона лучше брать моторы средней производительности со сниженной собственной массой
ёСборка системы управления
Плата с процессором в квадрокоптере для человека должна поддерживать регулировку оборотов пропеллеров, стабилизацию и смену направления. Ставят ее, как и во всех случаях, на центральной площадке, закрепляя винтами в просверленных отверстиях, и соединяют с моторной частью и приемником сигнала.
Аккумуляторов для коптера понадобится сразу несколько, и они должны обладать максимальной мощностью. Батарее придется питать восемь производительных моторов и к тому же поддерживать дрон в воздухе на протяжении хотя бы десять минут. Чтобы конструкция не получилась слишком громоздкой, при сборке проще связать аккумуляторы в съемный ранец, который сможет надеть на спину владелец.

Управление дроном для человека проводится с обычного пульта самим оператором
Посадочные ноги дрону для человека не пригодятся. Но понадобится предусмотреть в конструкции прочный подвес с лямками, который будет отвечать непосредственно за удержание оператора.
Внимание! Построить квадрокоптер для человека довольно дорого. Цена исчисляется десятками тысяч рублей, основные деньги уйдут на покупку моторов и батарей питания.
Заключение
Квадрокоптер своими руками — интересная и увлекательная задача для поклонников радиотехники. При желании в домашних условиях можно изготовить любой дрон, вплоть до моделей, способных поднять над поверхностью земли самого оператора.
Читайте также: