
Как сделать марсоход
Обновлено: 05.07.2024
Эван Хильгеманн, инженер-механик из Лаборатории реактивного движения НАСА, рассказал, как марсоходы изучают планету и передвигаются вдалеке от Земли. Публикуем перевод его текста в блоге Selectel.
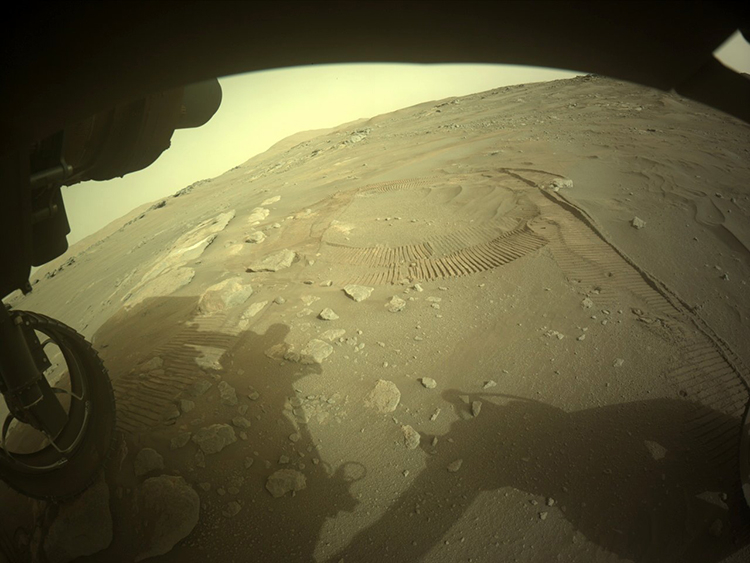
Вот как выглядит эмуляция движения ровера после того, как модель полностью готова. Серые области — участок Марса, по которому роверу предстоит проехать в ближайшем будущем. Оранжево-коричневые линии — это, собственно, путь ровера. В день моделируется около 30 метров поверхности, камеры просто не могут собрать больше информации, поэтому марсоход проезжает именно столько.
А вот наложение смоделированного пути ровера на реальные снимки, полученные навигационными камерами.
После того как ученые определились с направлением движения, нужно понять, как именно двигаться. Есть три режима: слепой режим, визуальная одометрия и autonav.
Слепой режим — самый простой способ движения из возможных. Марсоход в этом случае будет следовать инструкциям, присланным с Земли, и не обращать ни на что внимания. В идеале это отличный метод управления марсоходом, но условия на Марсе далеки от идеала. Зачастую внешние факторы влияют на продвижение к цели. Это может быть, например, скольжение колес по поверхности, так что марсоход вместо того, чтобы продвинуться на 10 метров, продвигается на 9 или даже 5.
Отличный способ понять, что такое слепое управление, — закрыть глаза и попробовать пройти по определенной траектории. Например, 7 метров вперед, затем повернуть на 30 градусов налево и пройти еще 4 метра. Мы в этом случае вообще не представляем, что происходит вокруг, и не адаптируемся к меняющимся условиям.
В целом, слепое управление — не лучший вариант, но он позволяет марсоходу двигаться быстро, поскольку системе не нужно останавливаться для того, чтобы сделать снимки. На максимальной скорости марсоход может проехать на длину футбольного поля всего за час. Но этот вариант выбирается только в том случае, если вокруг нет потенциально опасных объектов.
Визуальная одометрия применяется операторами чаще. В этом случае марсоход останавливается через каждый метр для того, чтобы сделать снимок грунта камерами. Бортовой компьютер затем оценивает изображение, сравнивает его с предыдущим и пытается понять, что изменилось вокруг, включая местоположение марсохода. Затем компьютер отправляет новые навигационные команды, позволяющие держаться запланированного пути.
Этот способ похож на предыдущий, только в процессе продвижения каждые пару шагов нужно останавливаться, чтобы открыть глаза и оглядеться.
Визуальная одометрия — баланс между скоростью и точностью движения. Метод крайне важен, поскольку помогает обнаружить препятствия на пути ровера и избежать их.
Это самый медленный вариант продвижения для марсохода. Если в идеальной ситуации ровер может пройти на длину футбольного поля при помощи слепого метода, как говорилось выше (это примерно 100 м), то в случае автономного режима в идеальных условиях марсоход пройдет всего 30 метров.
При этом ровер не умеет обнаруживать песок или острые камни, так что метод используют только тогда, когда местность абсолютно безопасна.
Одна из важнейших задач для марсохода: сбор и хранение образцов для возвращения на Землю. От успеха этой миссии зависит очень многое. И теперь, когда ровер начнет двигаться, вы будете понимать, что и как обеспечивает это движение.

Инженеры NASA опубликовали инструкцию по сборке и программное обеспечение, которые необходимы для самостоятельного создания упрощенной версии марсохода "Кьюриосити". Разработчики специально выбрали такие детали, которые можно найти в обычных магазинах.
После запуска марсохода "Кьюриосити" в NASA создали его упрощенную копию маленького размера, чтобы продемонстрировать базовые принципы работы марсохода и обучить студентов и школьников базовым знаниям в области робототехники. Однако уменьшенная копия была построена из дорогих материалов, и ее не могли использовать другие организации.
Теперь ученые смогли собрать упрощенную версию марсохода, которая предназначена для самостоятельной сборки. Несмотря на то что марсоход обладает более простой конструкцией, он сохранил многие черты своего прототипа. Инженеры оставили марсоходу специальную подвеску, которая помогает аппарату передвигаться по сложному рельефу.
Аппарат может преодолевать высокие препятствия, но при этом сохранять контакт всех колес с поверхностью.
В качестве компьютера в марсоходе используется одноплатный компьютер Raspberry Pi, а управлять аппаратом можно будет с помощью игрового контроллера от Xbox или приложения для "Андроида".
Авторы разработки оценили стоимость сборки в 2500 долларов, специалисты лаборатории собрали марсоход за 200 часов.

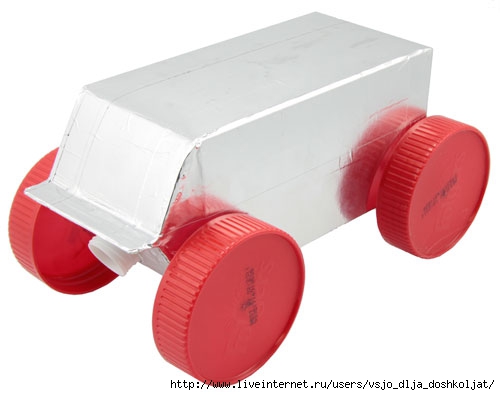
Вот такой Марсоход можно сделать из обычного жёсткого молочного пакета.
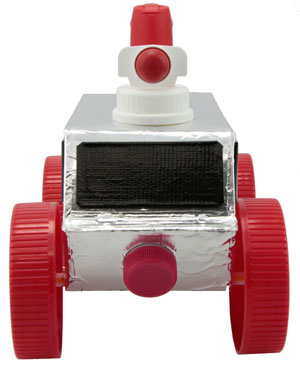
Для этого вам понадобятся:
упаковка-контейнер из-под молока или сока
картон
лента из фольги
2 соломинки для сока
4 крышки от баночек
любые дополнительные элементы, которые вы хотите использовать для Марсохода


Сначала надо контейнер полностью обклеить лентой из фольги, но можно использовать и любую другую клейкую ленту. Цвет ленты может быть любой.

Далее делаем четыре отверстия на каждой стороне контейнера - это будут колесные оси. Отверстия должны быть лишь немного больше, чем толщина соломинок. Необходимо вставить соломинку в углы так, чтобы они торчали с обеих сторон.


Крышки от баночек соединяются с соломинками с помощью клея пистолетом (возможен и другой вариант). Постарайтесь соломинку вставить по центру крыжечки.


На бутылочах моющих средств бывают самые разные интересные пульверизаторы, кнопочки и т.п. Их можно установить на крыше Марсохода.
Дверь и подножку можно сделать из картона и обклеить всё той же лентой.
Лобовые стекла можно наклеить из черной бумаги или любого другого материала.
Марсоход Perseverance Национального управления по аэронавтике и исследованию космического пространства (NASA) США избавился от оставшихся двух кусков породы, застрявших в механизме забора образцов грунта. Как сообщает команда миссии Perseverance, освободиться от оставшихся фрагментов удалось с помощью удачного манёвра.

Источник изображения: NASA / JPL-Caltech / MSSS
Источник изображения: NASA / JPL-Caltech / MSSS
Напомним, что проблемы начались 29 декабря в ходе забора шестой пробы марсианского грунта, когда в работе механизма буровой установки Perseverance произошёл сбой. Установив причину — попадание внутрь карусели буровой установки фрагментов породы — учёные после проведения тестов на клоне марсохода на Земле, выполнили аналогичный манёвр на Марсе. Очистка механизма отбора пород проводилась в два этапа. Направив трубку с образцом грунта на открытой стороной к поверхности Марса и встряхивая её в течение 208 секунд, марсоход смог очистить большую часть контейнера. После этого он повернул карусель буровой установки примерно на 75 градусов, а затем вернул её в исходное положение, чтобы избавиться от остатков грунта — двух обломков породы, которые, как предполагается, стали помехой при последнем отборе грунта.
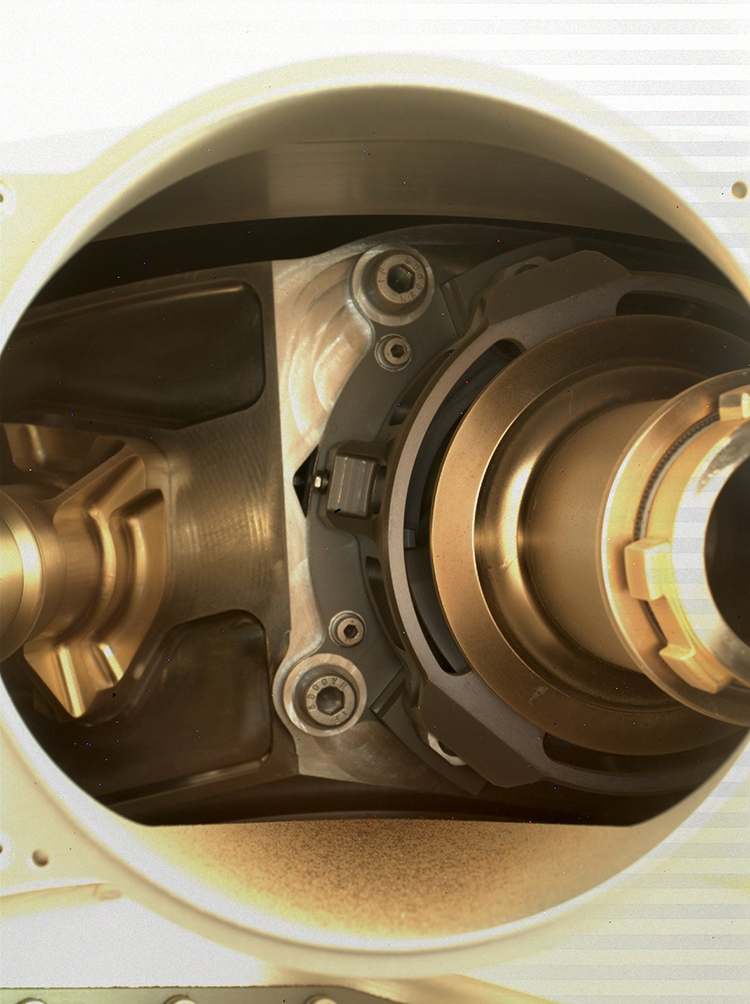
Источник изображения: NASA / JPL-Caltech / MSSS
И всё же в механизме оставалось два небольших фрагмента, которые теперь тоже удалили. Вскоре марсоход вновь приступит к дальнейшему отбору образцов грунта на Красной планете.
Читайте также: