
Как сделать кулачковый механизм
Обновлено: 07.07.2024
В кривошипно-шатунном механизме вместо кривошипного вала часто применяют коленчатый вал. От этого сущность действия механизма не меняется. Коленчатый вал может быть как с одним коленом, так и с несколькими (б, в).
Видоизменением кривошипно-шатунного механизма может быть также эксцентриковый механизм (г). У эксцентрикового механизма нет ни кривошипа, ни колен. Вместо них на вал насажен диск. Насажен же он не по центру, а смещено, то есть эксцентрично, отсюда и название этого механизма – эксцентриковый.
В некоторых кривошипно-шатунных механизмах приходится менять и длину хода ползуна. У кривошипного вала это делается обычно так. Вместо цельного выгнутого кривошипа на конец вала насаживается диск (планшайба). Шип (поводок, на что надевается шатун) вставляется в прорез, сделанный по радиусу планшайбы. Перемещая шип по прорезу, то есть удаляя его от центра или приближая к нему, мы меняем размер хода ползуна.
Ход ползуна в кривошипно-шатунных механизмах совершается неравномерно. В местах "мертвого хода" он самый медленный.
Кривошипно-шатунные – механизмы применяются в двигателях, прессах, насосах, во многих сельскохозяйственных и других машинах.
Кулисные механизмы
Вместо кулисы можно применить стержень, заключенный в направляющую втулку. Для прилегания к диску эксцентрика стержень снабжается нажимной пружиной. Если стержень работает вертикально, его прилегание иногда осуществляется собственным весом.
Для лучшего движения по диску на конце стержня устанавливается ролик.
Кулачковые механизмы
Но бывают дисковые кулачки другой конструкции. Тогда ролик скользит не по контуру диска, а по криволинейному пазу, вынутому сбоку диска (б). В этом случае нажимной пружины не требуется. Движение ролика со стержнем в сторону осуществляется самим пазом.
Кроме рассмотренных нами плоских кулачков (а), можно встретить кулачки барабанного типа (в). Такие кулачки представляют собой цилиндр с криволинейным пазом по окружности. В пазу установлен ролик со стержнем. Кулачок, вращаясь, водит криволинейным пазом ролик и этим сообщает стержню нужное движение. Цилиндрические кулачки бывают не только с пазом, но и односторонние – с торцовым профилем. В этом случае нажим ролика к профилю кулачка производится пружиной.
В кулачковых механизмах вместо стержня очень часто применяются качающиеся рычаги (в). Такие рычаги позволяют менять длину хода и его направление.
Длину хода стержня или рычага кулачкового механизма можно легко рассчитать. Она будет равна разнице между малым радиусом кулачка и большим. Например, если большой радиус равен 30 мм, а малый 15, то ход будет 30-15 = 15 мм. В механизме с цилиндрическим кулачком длина хода равняется величине смещения паза вдоль оси цилиндра.
Благодаря тому, что кулачковые механизмы дают возможность получить разнообразнейшие движения, их часто применяют во многих машинах. Равномерное возвратно-поступательное движение в машинах достигается одним из характерных кулачков, который носит название сердцевидного. При помощи такого кулачка происходит равномерная намотка челночной катушки у швейной машины.
Шарнирно-рычажные механизмы
На рисунке показан шарнирно-рычажный механизм, связанный с другими механизмами. Рычажный механизм получает качательное движение от кривошипно-шатунного и передает его ползуну. Длину хода при шарнирно-рычажном механизме можно увеличить за счет изменения длины плеча рычага. Чем длиннее плечо, тем больше будет его размах, а следовательно, и подача связанной с ним части, и наоборот, чем меньше плечо, тем короче ход.
Рассмотрим передаточные механизмы, с помощью которых можно преобразовать вращательное движение в поступательное или колебательное (и наоборот).
Такие механизмы характеризуются передаточной функцией – это первая производная от функции перемещения 1 ведомого звена по углу поворота или линейному перемещению ведущего звена.
Рычажные механизмы. Примером рычажного механизма является шарнирно-рычажный механизм (см. рис. 1.2).
На рис. 1.11 приведена кинематическая схема кривошипно-ползунного механизма, в состав которого входит кривошип 1, шатун 2 и ползун 3.
Этот механизм служит для преобразования вращательного движения кривошипа 1 в возвратно-поступательное движение ползуна 3 (и наоборот).

Рис. 1.11. Кривошипно-ползунный механизм
Передаточной функцией является зависимость скорости перемещения ползуна от угловой скорости кривошипа: v3=f(1) (и наоборот).
Передача винт-гайка. На рис. 1.12 приведена передача винт-гайка, которая предназначена для преобразования вращательного движения одного звена в поступательное движение другого.
Передаточной функцией является зависимость скорости осевого перемещения гайки от угловой скорости винта: v2=f(1).


Рис. 1.12. Передача винт-гайка: 1 – винт, 2 – гайка
Кулачковый механизм. На рис. 1.13 приведен кулачковый механизм (в состав которого входят кулачок 1 и толкатель 2) и его кинематическая схема.


Рис. 1.13. Кулачковый механизм: 1 – кулачок, 2 – толкатель
Передаточной функцией является зависимость скорости осевого перемещения толкателя от угловой скорости кулачка: v2=f(1).
В машиностроении широко распространены кулачковые механизмы, преобразующие вращательное движение в возвратно-поступательное или возвратно-качательное: например, для выполнения различных операций в системах управления рабочим циклом технологических машин, станков, двигателей и т.д. 1 .
Примеры по темам модуля 1
Схема машины дана на рис. 1.1. Частота вращения вала двигателя =3000 об/мин. Угловая скорость вращения входного вала исполнительного механизма =2с -1 . Подобрать червячную передачу, учитывая, что число витков (заходов) червяка равно одному либо двум. Определитьи .
1.Определим угловую скорость вращения вала двигателя (см. формулу (1.4)):

2. Найдем передаточное отношение передачи вращения (см. формулу (1.1)):

.
3. Подберем червячную передачу.

Вариант 1. Если число витков червяка , то число зубьев червячного колеса из формулы (1.11)

.

Вариант 2. Если число витков червяка =2, то число зубьев червячного колеса

Зубчатая передача должна уменьшить частоту вращения вала 4 (см. рис. 1.4) в 3 раза. Определить число зубьев колеса , если число зубьев шестерни = 25.
Число зубьев колеса из формулы (1.6)

.

Рис. 1.14. К примеру 3
Определить передаточное отношение механизма, приведенного на рис. 1.14, при заданных числах зубьев колес: =22, =77, =25, =50. Найти угловую скорость и частоту вращения ведущего вала 1, если вал 3 вращается с частотой =300 об/мин.
1.Определим передаточное отношение зубчатой передачи, установленной на валах 1 и 2

2. Определим передаточное отношение зубчатой передачи, установленной на валах 2 и 3

3. Передаточное отношение механизма

4. Найдем частоту вращения вала 1:

об/мин.
5. Рассчитаем угловую скорость вращения вала 1:

Ответ: передаточное отношение механизма равно 7, частота вращения вала 1 составляет 2100 об/мин, угловая скорость вращения – 219,8 с -1 .


Содержание
Вал имеет проточку, выполняющую функцию внутреннего кольца подшипника. Плоскость, в которой расположена эта проточка, находится под углом к оси вала [1] [ неавторитетный источник? ] . Наружное кольцо подшипника имеет рычаг, расположенный в плоскости подшипника на прямой, проходящей через центр вращения и точку крепления рычага к наружному кольцу подшипника. Рычаг может совершать движения только в плоскости, проходящей через ось вала, так как свободный конец рычага заведён в приводимую втулку, движение которой внутри определённого отрезка, параллельного оси вала, обеспечивается тем или иным способом другими элементами конструкции.
Число возвратно-поступательных движений прямо пропорционально числу оборотов. Амплитуда движений прямо пропорциональна углу отклонения плоскости подшипника от перпендикуляра к оси вала и прямо пропорциональна длине рычага.
Широкое распространение качающий подшипник получил в механизме перфораторов линейной компоновки (в перфораторах угловой компоновки его функцию выполняет КШМ, преобразующий вращательное движение вала в возвратно-поступательное движение в плоскости, перпендикулярной оси вала).
Цель: ознакомить студентов с назначением, областью применения и классификацией кулачковых механизмов, методикой проектирования и кинематического анализа кулачковых механизмов.
План:
- Назначение кулачковых механизмов, их классификация, область применения и особенности.
- Параметры кулачкового механизма.
3. Кинематический анализ плоских кулачковых механизмов.
4. Синтез кулачковых механизмов:
4.1. Определение закона движения ведомого звена.
4.2. Определение радиуса базовой поверхности кулачка для различных кулачковых механизмов по углу давления и из условия выпуклости профиля.
4.3. Определение радиуса ролика
4.4. Получение теоретического и практического профиля кулачка для различных типов кулачковых механизмов с поступательно движущимся (плоским, роликовым, острым) и качающимся (роликовым, плоским) толкателем.
Назначение кулачковых механизмов, их классификация, область применения и особенности
Кулачковым называется трехзвенный механизм с высшей кинематической парой, входное звено которого называется кулачком, а выходное - толкателем (или коромыслом). Часто для замены в высшей паре трения скольжения трением качения и уменьшения износа, как кулачка, так и толкателя, в схему механизма включают дополнительное звено - ролик и вращательную кинематическую пару. Подвижность в этой кинематической паре не изменяет передаточных функций механизма и является местной подвижностью.
Кулачковые механизмы предназначены для преобразования вращательного или поступательного движения кулачка в возвратно-вращательное или возвратно-поступательное движение толкателя.
Достоинства кулачковых механизмов:
o Возможность воспроизведения практически любого закона движения толкателя, обеспечение точных выстоев ведомого звена.
o Простота устройства и удобство технического обслуживания.
o Малые габариты при сложных законах движения.
o Большое удельное давление в точке контакта кулачка с толкателем, что может привести к выкрашиванию материалов (питтинг).
o Необходимость обеспечения замыкания высшей пары.
o Сложность изготовления кулачка.
Эти преимущества определили их широкое применение в измерительных приборах и машинах автоматического или полуавтоматического действия и обеспечивают функции “жёсткого” управления выполняемым процессом.
Классификация кулачковых механизмов:
Кулачковые механизмы классифицируются по следующим признакам:
- по расположению звеньев в пространстве (пространственные, плоские)
- по движению кулачка (вращательное, поступательное, винтовое)
- по движению выходного звена (возвратно-поступательное (с толкателем), возвратно-вращательное (с коромыслом))
- по наличию ролика (с роликом, без ролика)
- по виду кулачка )дисковый (плоский), цилиндрический, коноид (сложный пространственный))
- по форме рабочей поверхности выходного звена (плоская, заостренная, цилиндрическая, сферическая)
- по способу замыкания элементов высшей пары (силовое, геометрическое)
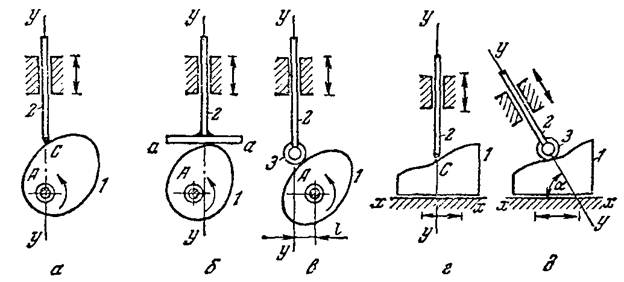
Рис. 4.1. Плоские кулачковые механизмы с поступательным толкателем
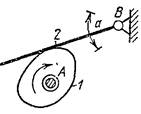
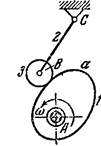
Рис. 4.2. Плоские кулачковые механизмы с вращающимся толкателем (коромыслом)
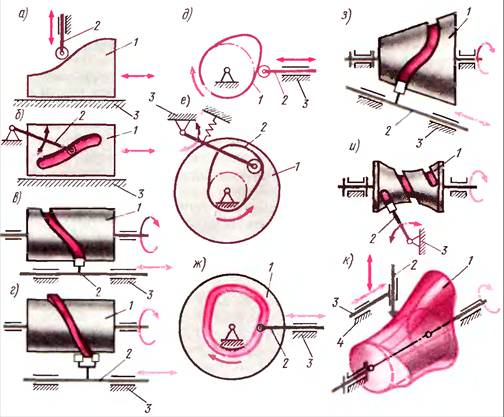
Рис. 4.3. Примеры кулачковых механизмов
При силовом замыкании (рис. 4.4) удаление толкателя осуществляется воздействием на него контактной поверхности кулачка (ведущее звено ‑ кулачок, ведомое ‑ толкатель). Движение толкателя при сближении осуществляется за счет силы упругости пружины или веса толкателя, при этом кулачок не является ведущим звеном. При геометрическом замыкании (рис.4.5) движение толкателя при удалении осуществляется воздействием наружной рабочей поверхности кулачка на толкатель, при сближении ‑ воздействием внутренней рабочей поверхности кулачка на толкатель. На обеих фазах движения кулачок ведущее звено, толкатель - ведомое.
Кулачок состоит из основной шайбы 1, вращающейся вокруг неподвижной оси A, и двух шайб 2 и 3, которые могут занимать различные положения относительно шайбы 1. Для этого шайбы 2 и 3 имеют криволинейные прорези а, скользящие по болту D, и прямолинейные прорези b, скользящие по валу А. Шайбы 2 и 3 могут жестко закрепляться на шайбе 1 с помощью гайки на болту D. Закрепляя шайбы 2 и 3 в различных положениях, можно изменять ход толкателя 4, который движется в неподвижной направляющей B, в пределах от xmin до xmax. Силовое замыкание механизма осуществляется пружиной 5.
Кулачок состоит из основной шайбы 1, вращающейся вокруг неподвижной оси A, и шайбы 2, которая может занимать различные положения относительно шайбы 1. Для этого шайба 2 имеет криволинейную прорезь а, скользящую по болту D, и прямолинейную прорезь b, скользящую по валу А. Шайба 2 может жестко закрепляться на шайбе 1 с помощью гайки на болту D. Закрепляя шайбу 2 в различных положениях, можно изменять ход толкателя 3, который движется в неподвижных направляющих В, в пределах от xmin до хmax. С толкателем 3 связан ролик 4, который может быть установлен в различных положениях специальным винтовым устройством. Профиль кулачка 1 воздействует попеременно на ролики 4 и 5. Силовое замыкание осуществляется специальными пружинами, не показанными на чертеже. При переходе профиля кулачка 2 от соприкосновения с роликом 4 к ролику 5 имеет место соударение кулачка 1 и толкателя 2.
Кулачок 1 вращается вокруг неподвижной оси А. Толкатель 2 движется поступательно в направляющих В и имеет два ролика 3 и 4. Ролик 3 с помощью винтового устройства а может устанавливаться в различных положениях. В положении, указанном на чертеже, ход толкателя 2 будет максимальным и равным xmax.Меняя положение ролика 3, можно получать различные величины хода толкателя в пределах от xmin до xmax. При этом профиль b кулачка воздействует попеременно на ролики 3 и 4. Силовое замыкание осуществляется пружинами, не показанными на чертеже. При переходе профиля b от соприкосновения с роликом 4 к ролику 3 имеет место соударение кулачка 1 и толкателя 2.
Кулачок 1, вращающийся вокруг неподвижной оси A, имеет четыре лепестка а с дуговыми прорезями d, оси которых являются дугами окружностей, описанных из точек С, D, Е и F. Толкатель 2 движется возвратно-поступательно в неподвижной направляющей В. Лепестки а могут закрепляться на кулачке 1 в различных положениях гайками b. Таким образом, за один оборот кулачка 1 могут быть осуществлены четыре разных или одинаковых закона движения толкателя 2. Силовое замыкание механизма обеспечивается не показанной на чертеже пружиной.
Жестко связанные друг с другом кулачки 1 и 2 вращаются вокруг неподвижной оси А. Профиль кулачка 1 очерчен по кривой b, а профиль кулачка 2 очерчен по кривой а. Коромысло 3, совершающее качательное движение вокруг неподвижной оси В, имеет ролик 4. Профили а и b кулачков 2 и 1 имеют одинаковые очертания. Смещая кулачки 1 и 2 друг относительно друга и жестко скрепляя их, можно изменять общий профиль кулачка и тем самым изменять фазы движения коромысла 3.
Жестко сцепленные друг с другом кулачки 1 и 6 вращаются вокруг неподвижной оси А. Коромысло 3 совершает качательное движение вокруг неподвижной оси В. С коромыслом 3 жестко связана траверза 5 с двумя роликами 2 и 4. Вращая траверзу 5 вокруг оси D и закрепляя ее на коромысле, можно осуществлять касание ролика 2 с профилем кулачка 6, как это показано на чертеже, или ролика 4 с профилем кулачка 1 и таким образом получать различные законы движения коромысла 3.
Кулачок 1, вращающийся вокруг неподвижной оси A, имеет профиль, очерченный по дуге круга радиуса r. Толкатель 2, движущийся возвратно-поступательно в неподвижной направляющей В, имеет ролики 3 и 4, которые могут устанавливаться и закрепляться в различных положениях вдоль дуговой направляющей а — а. Периоды остановки и движения толкателя 2 регулируются изменением положений роликов 3 и 4. Для увеличения времени остановки толкателя в верхнем положении расстояние между центрами роликов должно быть увеличено. Момент начала движения толкателя 2 регулируется передвижением роликов вдоль криволинейных направляющих а — а.
Кулачок 1, вращающийся вокруг неподвижной оси A, состоит из двух колец 3 и 5 с выступами b и с. Кольца имеют общую прорезь d. Смещая одно кольцо относительно другого и закрепляя их с помощью барашка 4, можно изменять длину дуги а — а профиля кулачка 1, соответствующую остановке коромысла 2, вращающегося вокруг неподвижной оси В, которое имеет ролик 6, перекатывающийся по внутреннему профилю кулачка 1. Силовое замыкание механизма обеспечивается пружиной 7.
В кривошипно-шатунном механизме вместо кривошипного вала часто применяют коленчатый вал. От этого сущность действия механизма не меняется. Коленчатый вал может быть как с одним коленом, так и с несколькими (б, в).
Видоизменением кривошипно-шатунного механизма может быть также эксцентриковый механизм (г). У эксцентрикового механизма нет ни кривошипа, ни колен. Вместо них на вал насажен диск. Насажен же он не по центру, а смещено, то есть эксцентрично, отсюда и название этого механизма – эксцентриковый.
В некоторых кривошипно-шатунных механизмах приходится менять и длину хода ползуна. У кривошипного вала это делается обычно так. Вместо цельного выгнутого кривошипа на конец вала насаживается диск (планшайба). Шип (поводок, на что надевается шатун) вставляется в прорез, сделанный по радиусу планшайбы. Перемещая шип по прорезу, то есть удаляя его от центра или приближая к нему, мы меняем размер хода ползуна.
Ход ползуна в кривошипно-шатунных механизмах совершается неравномерно. В местах "мертвого хода" он самый медленный.
Кривошипно-шатунные – механизмы применяются в двигателях, прессах, насосах, во многих сельскохозяйственных и других машинах.
Кулисные механизмы
Вместо кулисы можно применить стержень, заключенный в направляющую втулку. Для прилегания к диску эксцентрика стержень снабжается нажимной пружиной. Если стержень работает вертикально, его прилегание иногда осуществляется собственным весом.
Для лучшего движения по диску на конце стержня устанавливается ролик.
Кулачковые механизмы
Но бывают дисковые кулачки другой конструкции. Тогда ролик скользит не по контуру диска, а по криволинейному пазу, вынутому сбоку диска (б). В этом случае нажимной пружины не требуется. Движение ролика со стержнем в сторону осуществляется самим пазом.
Кроме рассмотренных нами плоских кулачков (а), можно встретить кулачки барабанного типа (в). Такие кулачки представляют собой цилиндр с криволинейным пазом по окружности. В пазу установлен ролик со стержнем. Кулачок, вращаясь, водит криволинейным пазом ролик и этим сообщает стержню нужное движение. Цилиндрические кулачки бывают не только с пазом, но и односторонние – с торцовым профилем. В этом случае нажим ролика к профилю кулачка производится пружиной.
В кулачковых механизмах вместо стержня очень часто применяются качающиеся рычаги (в). Такие рычаги позволяют менять длину хода и его направление.
Длину хода стержня или рычага кулачкового механизма можно легко рассчитать. Она будет равна разнице между малым радиусом кулачка и большим. Например, если большой радиус равен 30 мм, а малый 15, то ход будет 30-15 = 15 мм. В механизме с цилиндрическим кулачком длина хода равняется величине смещения паза вдоль оси цилиндра.
Благодаря тому, что кулачковые механизмы дают возможность получить разнообразнейшие движения, их часто применяют во многих машинах. Равномерное возвратно-поступательное движение в машинах достигается одним из характерных кулачков, который носит название сердцевидного. При помощи такого кулачка происходит равномерная намотка челночной катушки у швейной машины.
Шарнирно-рычажные механизмы
На рисунке показан шарнирно-рычажный механизм, связанный с другими механизмами. Рычажный механизм получает качательное движение от кривошипно-шатунного и передает его ползуну. Длину хода при шарнирно-рычажном механизме можно увеличить за счет изменения длины плеча рычага. Чем длиннее плечо, тем больше будет его размах, а следовательно, и подача связанной с ним части, и наоборот, чем меньше плечо, тем короче ход.
Рассмотрим передаточные механизмы, с помощью которых можно преобразовать вращательное движение в поступательное или колебательное (и наоборот).
Такие механизмы характеризуются передаточной функцией – это первая производная от функции перемещения 1 ведомого звена по углу поворота или линейному перемещению ведущего звена.
Рычажные механизмы. Примером рычажного механизма является шарнирно-рычажный механизм (см. рис. 1.2).
На рис. 1.11 приведена кинематическая схема кривошипно-ползунного механизма, в состав которого входит кривошип 1, шатун 2 и ползун 3.
Этот механизм служит для преобразования вращательного движения кривошипа 1 в возвратно-поступательное движение ползуна 3 (и наоборот).
Рис. 1.11. Кривошипно-ползунный механизм
Передаточной функцией является зависимость скорости перемещения ползуна от угловой скорости кривошипа: v3=f(1) (и наоборот).
Передача винт-гайка. На рис. 1.12 приведена передача винт-гайка, которая предназначена для преобразования вращательного движения одного звена в поступательное движение другого.
Передаточной функцией является зависимость скорости осевого перемещения гайки от угловой скорости винта: v2=f(1).
Рис. 1.12. Передача винт-гайка: 1 – винт, 2 – гайка
Кулачковый механизм. На рис. 1.13 приведен кулачковый механизм (в состав которого входят кулачок 1 и толкатель 2) и его кинематическая схема.
Рис. 1.13. Кулачковый механизм: 1 – кулачок, 2 – толкатель
Передаточной функцией является зависимость скорости осевого перемещения толкателя от угловой скорости кулачка: v2=f(1).
В машиностроении широко распространены кулачковые механизмы, преобразующие вращательное движение в возвратно-поступательное или возвратно-качательное: например, для выполнения различных операций в системах управления рабочим циклом технологических машин, станков, двигателей и т.д. 1 .
Примеры по темам модуля 1
Схема машины дана на рис. 1.1. Частота вращения вала двигателя =3000 об/мин. Угловая скорость вращения входного вала исполнительного механизма =2с -1 . Подобрать червячную передачу, учитывая, что число витков (заходов) червяка равно одному либо двум. Определитьи .
1.Определим угловую скорость вращения вала двигателя (см. формулу (1.4)):
2. Найдем передаточное отношение передачи вращения (см. формулу (1.1)):
.
3. Подберем червячную передачу.
Вариант 1. Если число витков червяка , то число зубьев червячного колеса из формулы (1.11)
.
Вариант 2. Если число витков червяка =2, то число зубьев червячного колеса
Зубчатая передача должна уменьшить частоту вращения вала 4 (см. рис. 1.4) в 3 раза. Определить число зубьев колеса , если число зубьев шестерни = 25.
Число зубьев колеса из формулы (1.6)
.
Рис. 1.14. К примеру 3
Определить передаточное отношение механизма, приведенного на рис. 1.14, при заданных числах зубьев колес: =22, =77, =25, =50. Найти угловую скорость и частоту вращения ведущего вала 1, если вал 3 вращается с частотой =300 об/мин.
1.Определим передаточное отношение зубчатой передачи, установленной на валах 1 и 2
2. Определим передаточное отношение зубчатой передачи, установленной на валах 2 и 3
3. Передаточное отношение механизма
4. Найдем частоту вращения вала 1:
об/мин.
5. Рассчитаем угловую скорость вращения вала 1:
Ответ: передаточное отношение механизма равно 7, частота вращения вала 1 составляет 2100 об/мин, угловая скорость вращения – 219,8 с -1 .
Содержание
Вал имеет проточку, выполняющую функцию внутреннего кольца подшипника. Плоскость, в которой расположена эта проточка, находится под углом к оси вала [1] [ неавторитетный источник? ] . Наружное кольцо подшипника имеет рычаг, расположенный в плоскости подшипника на прямой, проходящей через центр вращения и точку крепления рычага к наружному кольцу подшипника. Рычаг может совершать движения только в плоскости, проходящей через ось вала, так как свободный конец рычага заведён в приводимую втулку, движение которой внутри определённого отрезка, параллельного оси вала, обеспечивается тем или иным способом другими элементами конструкции.
Число возвратно-поступательных движений прямо пропорционально числу оборотов. Амплитуда движений прямо пропорциональна углу отклонения плоскости подшипника от перпендикуляра к оси вала и прямо пропорциональна длине рычага.
Широкое распространение качающий подшипник получил в механизме перфораторов линейной компоновки (в перфораторах угловой компоновки его функцию выполняет КШМ, преобразующий вращательное движение вала в возвратно-поступательное движение в плоскости, перпендикулярной оси вала).
Читайте также: