
Как сделать кинематическую схему
Обновлено: 08.07.2024
4 Приказом Федерального агентства по техническому регулированию и метрологии от 3 августа 2011 г. N 211-ст межгосударственный стандарт ГОСТ 2.703-2011 введен в действие в качестве национального стандарта Российской Федерации с 1 января 2012 г.
6 ПЕРЕИЗДАНИЕ. Декабрь 2018 г.
ВНЕСЕНА поправка, опубликованная в ИУС N 1, 2021 год
Поправка внесена изготовителем базы данных
1 Область применения
Настоящий стандарт устанавливает правила выполнения кинематических схем изделий всех отраслей промышленности.
На основе настоящего стандарта допускается, при необходимости, разрабатывать стандарты, устанавливающие выполнение кинематических схем изделий конкретных видов техники с учетом их специфики.
2 Нормативные ссылки
В настоящем стандарте использованы нормативные ссылки на следующие межгосударственные стандарты:
ГОСТ 2.051-2013 Единая система конструкторской документации. Электронные документы. Общие положения
ГОСТ 2.303-68 Единая система конструкторской документации. Линии
ГОСТ 2.701-2008 Единая система конструкторской документации. Схемы. Виды и типы. Общие требования к выполнению
Примечание - При пользовании настоящим стандартом целесообразно проверить действие ссылочных стандартов в информационной системе общего пользования - на официальном сайте Федерального агентства по техническому регулированию и метрологии в сети Интернет или по ежегодно издаваемому информационному указателю "Национальные стандарты", который опубликован по состоянию на 1 января текущего года, и по соответствующим ежемесячно издаваемым информационным указателям, опубликованным в текущем году. Если ссылочный стандарт заменен (изменен), то при пользовании настоящим стандартом следует руководствоваться заменяющим (измененным) стандартом. Если ссылочный стандарт отменен без замены, то положение, в котором дана ссылка на него, применяется в части, не затрагивающей эту ссылку.
3 Общие положения
3.1 Схема кинематическая - документ, содержащий в виде условных изображений или обозначений механические составные части и их взаимосвязи.
Схемы кинематические выполняют в соответствии с требованиями настоящего стандарта и ГОСТ 2.701.
3.2 Схемы кинематические могут быть выполнены как бумажный и (или) электронный конструкторский документ.
Схемы в форме электронного конструкторского документа рекомендуется выполнять однолистными с обеспечением деления этого листа при печати на необходимые форматы.
Примечание - Если схема кинематическая выполняется как электронный конструкторский документ, следует дополнительно руководствоваться ГОСТ 2.051.
3.3 Сложные схемы для наиболее наглядного представления могут быть выполнены динамическими (с использованием мультимедийных средств).
3.4 Схемы кинематические в зависимости от основного назначения подразделяют на следующие типы:
4 Правила выполнения схем
4.1 Правила выполнения принципиальных схем
4.1.1 На принципиальной схеме изделия должна быть представлена вся совокупность кинематических элементов и их соединений, предназначенных для осуществления, регулирования, управления и контроля заданных движений исполнительных органов; должны быть отражены кинематические связи (механические и немеханические), предусмотренные внутри исполнительных органов, между отдельными парами, цепями и группами, а также связи с источником движения.
4.1.2 Принципиальную схему изделия изображают, как правило, в виде развертки (см. приложение А).
Допускается принципиальные схемы вписывать в контур изображения изделия, а также изображать в аксонометрических проекциях.
4.1.3 Все элементы на схеме изображают условными графическими обозначениями (УГО) или упрощенно в виде контурных очертаний.
Примечание - Если УГО стандартами не установлено, то разработчик выполняет УГО на полях схемы и дает пояснения.
4.1.4 Механизмы, отдельно собираемые и самостоятельно регулируемые, допускается изображать на принципиальной схеме изделия без внутренних связей.
Схему каждого такого механизма изображают в виде выносного элемента на общей принципиальной схеме изделия, в которое входит механизм, или выполняют отдельным документом, при этом на схеме изделия помещают ссылку на этот документ.
4.1.5 Если в состав изделия входит несколько одинаковых механизмов, допускается выполнять принципиальную схему для одного из них в соответствии с требованиями раздела 6, а другие механизмы - изображать упрощенно.
4.1.6 Взаимное расположение элементов на схеме кинематической должно соответствовать исходному, среднему или рабочему положению исполнительных органов изделия (механизма).
Допускается пояснять надписью положение исполнительных органов, для которых выполнена схема.
Если элемент при работе изделия меняет свое положение, то на схеме допускается показывать его крайние положения тонкими штрихпунктирными линиями.
4.1.7 На схеме кинематической, не нарушая ясности схемы, допускается:
- переносить элементы вверх или вниз от их истинного положения, выносить их за контур изделия, не меняя положения;
- поворачивать элементы в положения, наиболее удобные для изображения.
В этих случаях сопряженные звенья пары, вычерченные раздельно, соединяют штриховой линией.
4.1.8 Если валы или оси при изображении на схеме пересекаются, то линии, изображающие их, в местах пересечения не разрывают.
Если на схеме валы или оси закрыты другими элементами или частями механизма, то их изображают как невидимые.
Допускается валы условно поворачивать так, как это показано на рисунке 1.
4.1.9 Соотношение размеров условных графических обозначений взаимодействующих элементов на схеме должно примерно соответствовать действительному соотношению размеров этих элементов в изделии.
4.1.10 На принципиальных схемах изображают в соответствии с ГОСТ 2.303:
- валы, оси, стержни, шатуны, кривошипы и т.д. - сплошными основными линиями толщиной ;
- элементы, показанные упрощенно в виде контурных очертаний, зубчатые колеса, червяки, звездочки, шкивы, кулачки и т.д. - сплошными линиями толщиной ;
- контур изделия, в который вписана схема, - сплошными тонкими линиями толщиной ;
- линии взаимосвязи между сопряженными звеньями пары, вычерченными раздельно, штриховыми линиями толщиной ;
- линии взаимосвязи между элементами или между ними и источником движения через немеханические (энергетические) участки - двойными штриховыми линиями толщиной ;
- расчетные взаимосвязи между элементами - тройными штриховыми линиями толщиной .
4.1.11 На принципиальной схеме изделия указывают:
- наименование каждой кинематической группы элементов, учитывая ее основное функциональное назначение (например, привод подачи), которое наносят на полке линии-выноски, проведенной от соответствующей группы;
Кинематические схемы механизмов определяют их конструкцию. Если дать этому определению определение, то это совокупность всех элементов устройства и отношений между ними. Когда на чертежах не требуется показывать конструкцию изделия и отдельных деталей, а достаточно показать лишь принцип работы изделия, передачу движения (кинематику машины или механизма), пользуются схемами. Если кратко ответить на этот вопрос, то кинематическая схема - это некий чертеж или, так сказать, документ, на котором изображены все механические звенья с указанием размеров. Наличие размеров необходимо для кинематического анализа, изучающего основы движения механизмов, их траектории и скорости.
ТММ – это наука, изучающая структуру, кинематику и динамику механизмов и машин при их анализе и синтезе.
Схема, как и чертеж, — графическое изображение. Разница заключается в том, что на схемах детали изображаются с помощью условных графических обозначений. Эти обозначения представляют собой значительно упрощенные изображения, напоминающие детали лишь в общих чертах. Кроме того, на схемах изображаются не все детали, из которых состоит изделие. Показывают лишь те элементы, которые участвуют в передаче движения жидкости, газа и т. п. Элемент кинематической пары или звена - это система поверхностей и линий, по которым одно звено контактирует с другим. Эта точка также называется узлом соединения.
Очень часто звенья цепи называют кинематическими парами. Если мы определяем научный язык, то это сопряженные твердые элементы в количестве не менее двух штук, которые в силу условий соединения ограничивают движение друг друга. Кинематическая схема применяется абсолютно во всех областях промышленности - машиностроении, станкостроении и др. Все правила выполнения регламентированы специальным документом - ГОСТ 2.770—68, наиболее часто встречающиеся из них приведены в таблице.
Как видно из таблицы, вал, ось, стержень, шатун обозначаются сплошной утолщенной прямой линией. Винт, передающий движение, обозначается волнистой линией. Зубчатые колеса обозначают окружностью, проведенной штрихпунктирной линией на одной проекции, и в виде прямоугольника, обведенного сплошной линией, на другой . При этом, как и в некоторых других случаях (передача цепью, передачи реечные, муфты фрикционные и др.), применяются общие обозначения (без уточнения типа) и частные обозначения (с указанием типа). На общем обозначении, например, тип зубьев зубчатых колес не показывают вовсе , а на частных обозначениях показывают тонкими линиями. Пружины сжатия и растяжения обозначаются зигзагообразной линией.
Кинематическая схема – это схема, на которой показана последовательность передачи движения от двигателя через передаточный механизм к рабочим органам машины и из взаимосвязь.
На кинематических схемах изображают только те элементы машины или механизма, которые принимают участие в передаче движения без соблюдения размеров и пропорций.
Все элементы на схеме обозначают условными графическими обозначениями согласно ГОСТ 2.770-68 ЕСКД Обозначения условные графические в схемах.
Кинематические схемы выполняют в соответствии с требованиями
ГОСТ 2.703-2011 ЕСКД Правила выполнения кинематических схем.
Читать кинематическую схему начинают от двигателя, как источника движения всех подвижных деталей механизма. На схеме он обозначается, как правило, окружностью с буквой М в середине.
Определяя последовательно по условным обозначениям каждый элемент кинематической цепи, устанавливают его назначение и характер передачи движения.
Основные условные обозначения
| Наименование | Обозначение |
| Вал, валик, ось, стержень, шатун и т.п. |  |
| Подшипники скольжения и качения на валу (без уточнения типа) |  |
| Муфта. Общее обозначение без уточнения типа |  |
| Передачи фрикционные: а) с цилиндрическими роликами |  |
| Передача ремнем без уточнения типа ремня |  |
| Передача плоским ремнем |  |
| Передача клиновым ремнем |  |
| Наименование | Обозначение |
| Передача круглым ремнем |  |
| Передача зубчатым ремнем |  |
| Передача цепью, общее обозначение без уточ- нения типа цепи |  |
| Передачи зубчатые (цилиндрические): а) внешнее зацепление (общее обозначение без уточнения тина зубьев) |  |
| б) то же, с прямыми, косыми и шевронными зубьями |  |
| Передачи зубчатые с пересекающимися валами, конические |  |
| Наименование | Обозначение |
| Передачи зубчатые со скрещивающимися валами: а) червячные с цилиндрическим червя ком | 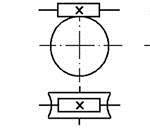 |
| б) червячные глобоидные |  |
| Передача винт-гайка |  |
| Электродвигатель |  |
Пример описания кинематической схемы:

Вращательное движение от электродвигателя 1 через муфту(упругую) 2 передается на вал Ӏ с зубчатым колесом 3 ( обычно это шестерня), которое зацепляется с зубчатым колесом 4 второго вала ӀӀ. Зубчатая передача является цилиндрической косозубой и расположена в корпусе 5. На вал ӀӀ насажен звездочка 6 цепной передачи. С помощью цепи движение передается на выходной вал ӀӀӀ через вторую звездочку. Опорами валов являются подшипники.
Кинематическая схема механизма дает полное представление о структуре механизма и определяет его кинематические свойства. Она является графическим изображением механизма посредством условных обозначений звеньев и кинематических пар с указанием размеров, которые необходимы для кинематического анализа механизма.
На кинематических схемах механизмов звенья, как правило, изображаются отрезками прямых и нумеруются арабскими цифрами. Кинематические пары в пространственных механизмах обозначаются большими буквами латинского алфавита. Элементы высшей пары очерчиваются кривыми. Стойку (неподвижное звено) принято выделять штриховкой (рис. 8.5, 8.6).

Рис. 8.5. Схематическое изображение неподвижных элементов:
а и б — вращательная кинематическая пара; в — поступательная пара; г — высшая пара

Рис. 8.6. Схема зубчатой передачи на плоскости:
а — параллельной движению точек механизма; 6 — перпендикулярной плоскости вращения звеньев механизма
Для построения кинематической схемы механизма рекомендуется установить основное кинематическое назначение механизма, подсчитать общее число звеньев k, включая стойку. Число п подвижных звеньев будет равно п = k - 1; установить класс кинематических пар, а также найти степень подвижности механизма; вычертить схему механизма. Начинать ее надо с нанесения на чертеж неподвижных элементов кинематических пар, т.е. элементов, принадлежащих стойке. Далее вычертить ведущие звенья, входящие в кинематические пары со стойкой. (Число этих звеньев соответствует найденной ранее степени подвижности.) Затем надо нанести на чертеже кинематическую цепь, образующую ведомую часть механизма.
В механизме может быть одно или несколько ведущих звеньев. Каждое такое звено вместе со стойкой образуют по классификации Л. В. Ассура начальный механизм 1-го класса. Такие механизмы широко представлены в контрольно-измерительном, испытательном и специальном оборудовании. Более сложные механизмы составляют присоединением к начальному механизму так называемых структурных групп.
Структурной группой, или группой Ассура, называют кинематическую цепь, которая при присоединении к стойке получает нулевую подвижность. Для плоских механизмов с КП 5-го класса это условие записывается так (см. формулу (8.2))


откуда
т.е. число КП 5-го класса, входящих в группу, должно равняться 3/2 от числа входящих в нее звеньев.

Рис. 8.7. Структурные группы 2-го класса:
а — 2-го порядка; б — 3-го класса 3-го порядка; в — 4-го класса 2-го порядка
Структурная группа с п = А и р5 = 6 может дать группу 3-го класса 3-го порядка — трехповодковую группу, или триаду (см. рис. 8.7, б) либо группу 4-го класса 2-го порядка (см. рис. 8.7, в). Признаком групп 3-го класса является трехзвенное базовое звено, а групп 4-го класса — четырехзвенный подвижный контур. Класс группы определяется наивысшим по классу замкнутым контуром, входящим в ее состав.
Порядок структурной группы соответствует числу свободных элементов КП, с помощью которых данную группу можно присоединить к стойке или звеньям механизма. Класс и порядок механизма определяются классом и порядком наиболее сложной его группы.
Читайте также: